PROCEDIMIENTO DE MANDO DE UN CONJUNTO DE ARRANQUE DE UN VEHÍCULO DE MOTOR TÉRMICO.
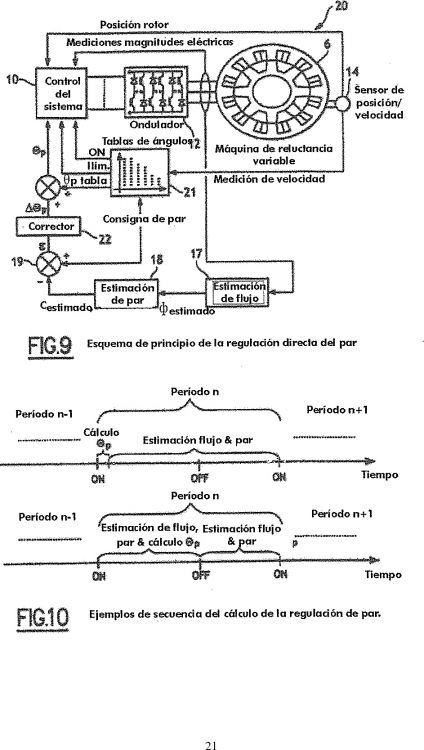
Procedimiento de mando de un conjunto de arrastre de vehículo en el cual se aplica a una máquina de reluctancia variable una consigna (θ
ptabla) de ángulo de conducción facilitada por una tabla de ángulos dirigida por el valor del par de consigna, caracterizado porque, a partir del desvío (ε) entre un par de consigna que debe ser facilitado por el conjunto de arrastre y una estimación del citado par, se determina un ángulo de conducción suplementario (δθp) destinado a ser aplicado a la máquina además de la consigna (θptabla) de ángulo de conducción para hacer el desvío nulo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2005/050984.
Solicitante: RENAULT SAS.
Nacionalidad solicitante: Francia.
Dirección: 13-15, QUAI ALPHONSE LE GALLO 92100 BOULOGNE BILLANCOURT FRANCIA.
Inventor/es: LOUDOT,Serge.
Fecha de Publicación: .
Fecha Solicitud PCT: 24 de Noviembre de 2005.
Clasificación Internacional de Patentes:
- H02P25/08E
Clasificación PCT:
- H02P25/08 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 25/00 Disposiciones o métodos para el control de motores de corriente alterna caracterizados por la clase de motor de corriente alterna o por detalles estructurales. › Motores de reluctancia.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
Fragmento de la descripción:
La invención se refiere a los conjuntos de arrastre de vehículo que comprenden un motor térmico, así como a los procedimientos de mando de tales conjuntos.
En la figura 1 se ha representado un ejemplo de realización clásico de un 5 conjunto de este tipo. El conjunto 2 constituye un conjunto de arrastre de vehículo automóvil. Este conjunto comprende, de manera en sí conocida, un motor térmico 4, tal como un motor de gasolina o un motor diesel. Éste comprende un alternador-arrancador formado por una máquina 6 de reluctancia variable de un tipo en sí conocido. Esta máquina 6 está unida mecánicamente al 10 motor 4 para facilitar un par a este último, especialmente con miras a hacerle arrancar cuando está parado. Esta unión mecánica de un tipo en sí conocido lleva la referencia 8 de la figura 8. El conjunto comprende una unidad de mando 10 que comprende medios informáticos clásicos que la permiten mandar los diferentes órganos del conjunto como se verá más adelante. El conjunto 2 15 comprende igualmente un ondulador 12 por medio del cual la unidad de mando 10 gobierna el funcionamiento de la máquina 6.
Por otra parte, el conjunto 2 comprende un sensor de posición y/o un sensor de velocidad 14 que permite a la unidad 10 conocer en cada instante una medición de la velocidad de la máquina 6. 20
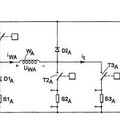
En la figura 2 se ha representado una topología de ondulador clásico para el mando de la fase motor. En esta figura 2, VDC representa la tensión continua de alimentación del ondulador, I1 e I2 dos interruptores eléctricos conmutables para la apertura y el cierre y D1 y D2 dos diodos.
Un procedimiento de mando de un conjunto de arranque de este tipo 25 instalado en un vehículo (que como se ha visto comprende una máquina de reluctancia asociada a un ondulador) se utiliza generalmente para controlar el par facilitado por este conjunto de arrastre.
Sin embargo, en el marco de una producción industrial en gran serie, es indispensable garantizar la más baja variabilidad posible del par facilitado por 30 dos conjuntos diferentes, a igualdad por otra parte de todo lo demás (mando, tensión de alimentación, etc.).
Ahora bien, el par facilitado por una máquina de reluctancia conmutada depende de modo importante de las dispersiones geométricas de la máquina, de
las dispersiones magnéticas de las chapas, o también de las dispersiones eléctricas de los hilos.
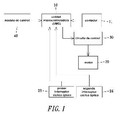
En las figuras 3 y 4 se ha ilustrado la forma de las corrientes y de las tensiones de fase tales como están representadas en la figura 2, respectivamente a baja velocidad y a alta velocidad, en función del ángulo eléctrico del rotor 5 (siendo este ángulo nulo cuando el diente del rotor están en conjunción con el diente del estator.).
Se sabe que una máquina de reluctancia variable tal como la máquina 6 de la figura 1 se gobierna esencialmente por tres variables:
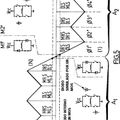
- los ángulos de inicio de la magnetización ON y de final de la 10 magnetización OFF;
- y, a bajas velocidades, la corriente de fase cresta que está regulada (Ilim);
La magnetización de la fase de la máquina se hace en el intervalo de tiempo constituido por el ángulo de conducción Өp =OFF-ON.
Con el fin de gobernar la máquina de reluctancia variable, se utilizan como 15 parámetros de entrada de la unidad de mando 10 los parámetros de mando (ON, Өp, Ilim) a baja velocidad y (ON, Өp) a alta velocidad; estando estos parámetros optimizados para cada punto de funcionamiento par-velocidad.
Como está ilustrado en la figura 1, y de modo en sí conocido, la máquina 6 es gobernada por la unidad de mando 10 por medios de ley de mando obtenidos 20 de tablas predefinidas que dan los ángulos de inicio (ON), de conducción (Өptabla) y la corriente (Ilim) en función de la velocidad del alternador obtenida a partir del sensor 14. Estas cantidades están determinadas igualmente en función del par que hay que facilitar por la conexión 8 al motor 4. Eventualmente, podrá tenerse en cuenta igualmente la tensión de alimentación continua VDC del ondulador si ésta 25 es susceptible de variar, así como otros parámetros tales como, por ejemplo, la temperatura de los bobinados.
En cada período eléctrico, se define un indicador en función de estos parámetros externos (velocidad, tensión de alimentación, temperatura de los bobinados, etc.) y de la consigna del par. Este indicador dirige entonces las tablas 30 que facilitan (eventualmente después de extrapolación) los parámetros de mando (ON, Өp, Ilim) a baja velocidad y (ON, Өp) a alta velocidad.
Sin embargo, esta ley de mando clásica en bucle abierto de acuerdo con la cual las órdenes de mando aplicadas dependen únicamente de la posición, de la velocidad, de la consigna de par, y de la corriente (tenida en cuenta únicamente a 35
baja velocidad cuando ésta está regulada a Ilim) no es satisfactoria: el par efectivamente facilitado permanece totalmente dependiente de las dispersiones (mecánicas, magnéticas, eléctricas, etc.) de la máquina.
Así, refiriéndose a la figura 5, se han representado los efectos de la variabilidad del entrehierro entre rotor y estator sobre el par electromagnético 5 facilitado (es decir, la superficie del ciclo energético) cuando se utiliza el mando clásico.
Hay que observar que los efectos de la variación de otros parámetros (dimensiones geométricas, parámetros eléctricos o magnéticos) son relativamente similares. 10
En la figura 5, el entrehierro 1 es superior al entrehierro 2, lo que genera una diferencia de las curvas de saturación cuando un diente retórico está en conjunción con un diente estatórico de la fase considerada. En oposición, el efecto de la variación del entrehierro es despreciable.
En la figura 5 se constata que, para un mismo mando, el par eléctrico 15 facilitado es diferente según el entrehierro de la máquina.
Con el fin de mejorar el nivel de calidad y de asegurar una prestación idéntica de un conjunto al otro, una primera solución consiste en reducir las diversas tolerancias de la máquina producida en serie (especialmente las tolerancias mecánicas, magnéticas y eléctricas). Sin embargo, esta solución se 20 considera costosa, especialmente en términos de proceso de fabricación y de materia prima. El artículo « DITC-direct instantaneous torque control of switched reluctance drives » de Inderka y otros, presenta un controlador de histéresis que genera las señales de conmutación de las fases de una máquina de reluctancia variable con el fin de regular el par facilitado. 25
Por el documento US 4.707.650 se conoce un sistema de control en bucle cerrado de una máquina de reluctancia variable que pone en práctica un bucle de velocidad o un bucle de par para determinar los parámetros de mando (ON, Өp, Ilim) utilizados como consignas de gobierno de la máquina.
Un objeto de la invención es proponer una solución que permita compensar 30 las dispersiones inherentes a la máquina durante el funcionamiento de ésta, sin por ello aumentar el coste de dicha máquina.
A tal efecto, la invención, de acuerdo con un primer aspecto, propone un procedimiento de mando de un conjunto de arrastre de vehículo en el cual se aplica a una máquina de reluctancia variable un valor de consigna de ángulo de 35
conducción, caracterizado porque se regula el citado valor de consigna de ángulo de conducción con la ayuda de un ángulo de conducción suplementario determinado en función de una medición de control del par facilitado por el conjunto de arrastre al motor.
Ciertos aspectos preferidos, pero no limitativos, de este procedimiento son 5 los siguientes:
- la medición de control del par se realiza calculando el desvío entre el par de consigna y un valor de estimación del par;
- el desvío es tratado por un corrector provisto de una ley de corrección adaptado para determinar el ángulo de conducción suplementario destinado a ser 10 aplicado al alternador para regular el citado valor de consigna de ángulo de conducción y hacer el desvío nulo;
- la medición de control de par se realiza con la ayuda de una estimación del flujo de fase;
- el flujo es estimado por integración de la tensión aplicada a esta fase 15 durante un período eléctrico, según Φestimado = donde Rfase designa la resistencia...
Reivindicaciones:
1. Procedimiento de mando de un conjunto de arrastre de vehículo en el cual se aplica a una máquina de reluctancia variable una consigna (Өptabla) de ángulo de conducción facilitada por una tabla de ángulos dirigida por el valor del par de consigna, caracterizado porque, a partir del desvío (ε) entre un par de 5 consigna que debe ser facilitado por el conjunto de arrastre y una estimación del citado par, se determina un ángulo de conducción suplementario (ΔӨp) destinado a ser aplicado a la máquina además de la consigna (Өptabla) de ángulo de conducción para hacer el desvío nulo.
2. Procedimiento de acuerdo con la reivindicación precedente, caracterizado 10 porque se estima el par facilitado por el conjunto de arrastre con la ayuda de una estimación del flujo de fase.
3. Procedimiento de acuerdo con la reivindicación precedente, caracterizado porque el flujo se estima por integración de la tensión aplicada a esta fase durante un período eléctrico, de acuerdo con Φestimado = donde 15 Rfase designa la resistencia del bobinado estatórico, Ufase la tensión de fase e Ifase la corriente de fase.
4. Procedimiento de acuerdo con la reivindicación precedente, caracterizado porque se realiza una medición directa de la tensión de fase.
5. Procedimiento de acuerdo con la reivindicación 3, caracterizado porque 20 se utilizan las órdenes de mando y la corriente de fase para determinar la tensión de fase, siendo ésta igual a la tensión de alimentación VDC durante la duración de la magnetización, a –VDC durante la duración de la desmagnetización, y a cero durante las fases de rueda libre o cuando la corriente de fase es nula.
6. Procedimiento de acuerdo con una de las reivindicaciones 2 a 5, 25 caracterizado porque la estimación de flujo es actualizada periódicamente con la ayuda de un valor del flujo medido.
7. Procedimiento de acuerdo con la reivindicación precedente, caracterizado porque la estimación del flujo es reajustada en cada período eléctrico, durante el paso a oposición, al valor L0.Ifase donde L0 es la inductancia en oposición e Ifase la 30 corriente medida en el instante del paso a oposición.
8. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 2 a 7, caracterizado porque el par es estimado, con la ayuda de la estimación del flujo, calculando la diferencia entre la energía transmitida durante la fase de magnetización y la energía reenviada durante la fase de desmagnetización. 35
9. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 1 a 8, caracterizado porque el citado desvío es tratado para determinar el ángulo de corrección suplementario por una ley de corrección de tipo proporcional-integral.
10. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 2 a 9, caracterizado porque se aplica al alternador en un período eléctrico, un valor 5 de consigna de ángulo de conducción calculado a partir de la estimación del flujo calculado en el período eléctrico precedente.
11. Procedimiento de acuerdo con la reivindicación precedente, caracterizado porque se impone al valor de consigna del ángulo de conducción durante el primer período un valor predeterminado, tal como el valor de ángulo 10 de conducción (Өptabla) facilitado por una tabla de ángulos dirigida por el valor del par de consigna.
12. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 1 a 11, caracterizado porque el citado valor de consigna (Өp) de ángulo de conducción es igual a la suma del ángulo de conducción suplementario (ΔӨp) y 15 de un valor de ángulo de conducción (Өptabla) facilitado por una tabla de ángulos dirigida por el valor del par de consigna.
13. Procedimiento de acuerdo con la reivindicación precedente, caracterizado porque el alternador funciona en modo discontinuo o en modo corriente continuo, siendo el citado valor de ángulo de conducción (Өptabla) 20 facilitado por la tabla de ángulos igual a 180º durante el funcionamiento en modo corriente continuo.
14. Conjunto (20) de arrastre para vehículo que comprende:
- un motor térmico (20);
- un alternador (6) de reluctancia variable para arrastrar el motor; 25
- una unidad de mando (10) adaptada para aplicar al alternador una consigna (Өptabla) de ángulo de conducción facilitada por una tabla de ángulos dirigida por el valor del ángulo de consigna, y
- medios (17, 18, 19) para controlar el par facilitado por el conjunto de arrastre al motor calculando el desvío entre un par de consigna y una estimación 30 del citado par,
caracterizado porque la unidad de mando está además adaptada para determinar, a partir del citado desvío, un ángulo de conducción suplementario (ΔӨp) destinado a ser aplicado al alternador además de la citada consigna (Өptabla) de ángulo de conducción para hacer el citado desvío nulo. 35
15. Conjunto de acuerdo con la reivindicación precedente, caracterizado porque comprende medios (17) adaptados para calcular una estimación del flujo así como medios (18) adaptados para calcular una estimación del par a partir de la citada estimación del flujo.
16. Conjunto de acuerdo con una cualquiera de las reivindicaciones 14 a 15 5 en el cual una tabla de ángulos es dirigida por el valor de consigna del par para facilitar la citada consigna de ángulo de conducción (Өptabla) además de la cual el ángulo de conducción suplementario es aplicado al alternador.
17. Vehículo caracterizado porque comprende un conjunto de acuerdo con una cualquiera de las reivindicaciones 14 a 16. 10
Patentes similares o relacionadas:
CONVERTIDOR DE FRECUENCIA PARA UN MEDIDOR DE RELUCTANCIA CONECTADO Y SISTEMA MECATRÓNICO, del 5 de Diciembre de 2011, de MIELE & CIE. KG: Convertidor de frecuencia, que comprende un rectificador (B1) para generar o transformar una tensión alterna en el lado de la red (UN) en una tensión […]
 DISPOSITIVO DE RECTIFICACION SINCRONA Y MAQUINA ELECTRICA SINCRONA QUE LO EMPLEA, del 28 de Octubre de 2010, de JOHNSON CONTROLS AUTOMOTIVE ELECTRONICS: Dispositivo de rectificación síncrona del tipo puente en H que alimenta a una bobina de una fase de una máquina síncrona del tipo de reluctancia variable para […]
DISPOSITIVO DE RECTIFICACION SINCRONA Y MAQUINA ELECTRICA SINCRONA QUE LO EMPLEA, del 28 de Octubre de 2010, de JOHNSON CONTROLS AUTOMOTIVE ELECTRONICS: Dispositivo de rectificación síncrona del tipo puente en H que alimenta a una bobina de una fase de una máquina síncrona del tipo de reluctancia variable para […]
MÁQUINA DE RELUCTANCIA CONMUTADA, del 24 de Octubre de 2019, de CENTRO DE INVESTIGACIONES ENERGÉTICAS, MEDIOAMBIENTALES Y TECNOLÓGICAS, O.A., M.P: Máquina de reluctancia conmutada. Siguiendo la configuración propuesta para el circuito magnético de la máquina de la presente invención, se reduce la cantidad de hierro […]
Método para sincronizar una máquina eléctrica de reluctancia síncrona, del 20 de Marzo de 2019, de KSB SE & Co. KGaA: Un método para sincronizar una máquina eléctrica de reluctancia síncrona en el que dicha máquina (E) no tiene sensores de tensión de magnetización […]
Conjunto aspirador con entrada a través de depósito extraíble, del 28 de Marzo de 2018, de SHOP VAC CORPORATION: Un conjunto aspirador que tiene: un conjunto de motor/ventilador que tiene un motor y un impulsor de aire ; una manguera […]
 PROCEDIMIENTO Y APARATO PARA CONTROL DE BAJA VELOCIDAD DE MOTORES DE RELUCTANCIA, del 13 de Marzo de 2013, de YA HORNG ELECTRONIC CO. LTD.: Se desvela un procedimiento y aparato para control de baja velocidad de motores de reluctancia, que ofrece una unidad microcontroladora (UMC), que tiene una […]
PROCEDIMIENTO Y APARATO PARA CONTROL DE BAJA VELOCIDAD DE MOTORES DE RELUCTANCIA, del 13 de Marzo de 2013, de YA HORNG ELECTRONIC CO. LTD.: Se desvela un procedimiento y aparato para control de baja velocidad de motores de reluctancia, que ofrece una unidad microcontroladora (UMC), que tiene una […]
 Controlador para máquinas eléctricas, del 1 de Febrero de 2013, de CG Drives & Automation Sweden AB: Un circuito de control para una máquina de reluctancia que tiene dos partes mutuamente amovibles, y al menosun devanado inductivo de fase (WA, WB, WC), cuya inductancia […]
Controlador para máquinas eléctricas, del 1 de Febrero de 2013, de CG Drives & Automation Sweden AB: Un circuito de control para una máquina de reluctancia que tiene dos partes mutuamente amovibles, y al menosun devanado inductivo de fase (WA, WB, WC), cuya inductancia […]
 Estimación de posición de rotor basada en resonancia, del 25 de Julio de 2012, de INVERTO NV: Sistema de prueba para una máquina de polos salientes , estando adaptado el sistema deprueba para generar una orden de pulso de prueba para aplicar un pulso […]
Estimación de posición de rotor basada en resonancia, del 25 de Julio de 2012, de INVERTO NV: Sistema de prueba para una máquina de polos salientes , estando adaptado el sistema deprueba para generar una orden de pulso de prueba para aplicar un pulso […]