Cambiador de herramientas.
Cambiador de herramientas que consta de dos partes de módulo cambiador (1,
2) acoplables una con otra, lascuales están formadas cada una de ellas por una parte de conexión (3) y al menos una parte de acoplamiento (4)asociada a la parte de conexión (3), caracterizado por que las partes (1, 2) del módulo cambiador llevan asociadade manera soltable por el lado de la parte de conexión una respectiva placa adaptadora (5) que presenta variaszonas de fijación (6) para equiparla con un número deseado de partes (1, 2) de módulo cambiador.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2010/001517.
Solicitante: DE-STA-CO EUROPE GMBH.
Nacionalidad solicitante: Alemania.
Dirección: HIROSHIMASTRASSE 2 61440 OBERURSEL ALEMANIA.
Inventor/es: GRUPP,MICHAEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q7/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 7/00 Dispositivos para la manipulación de piezas, especialmente combinados a las máquinas-herramientas o dispuestos en estas máquinas o especialmente concebidos para ser utilizados en relación con estas máquinas, p. ej. para el transporte, la carga, la colocación, la descarga, la selección (incorporados a los husillos de trabajo B23B 13/00, B23B 19/02; para tornos automáticos o semiautomáticos B23B 15/00). › por medio de pinzas.
- B25J15/04 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
PDF original: ES-2431021_T3.pdf
Fragmento de la descripción:
Cambiador de herramientas.
La invención concierne a un cambiador de herramientas según el preámbulo de la reivindicación 1 independiente.
Tales cambiadores de herramientas se emplean especialmente en los extremos de los brazos de robots, y las herramientas a disponer en los cambiadores de herramientas consisten generalmente en herramientas de agarre, tenazas de soldadura, pinzas de vacío, dispositivos de sujeción o aparatos similares.
Tales cambiadores de herramientas son básicamente conocidos y se emplean con las más diferentes construcciones. Solamente a título de ejemplo cabe remitirse, para tales cambiadores de herramientas, a los documentos siguientes: DE 100 50 619 B4, DE 10 2007 016 300 A1, DE 10 2005 031 803 A1 y DE 20 2005 010 693 U1. En términos muy generales, es inherente a tales cambiadores de herramientas la construcción siguiente: Están constituidos por una estructura de dos partes en la que sus partes están configuradas de modo que pueden soltarse y unirse entre ellas por medio de elementos de encastre (piezas de acoplamiento) encajables uno en otro, pudiendo disponerse una de las partes de manera fijable a un aparato de manipulación (por ejemplo, un brazo de robot) por medio de elementos de fijación y estando configurada la otra parte provista también de elementos de unión como un sujetador para una herramienta a asociar al mismo. En vista de las cargas diferentes a dominar por las herramientas, se proporcionan series de construcción de cambiadores de herramientas de diferentes dimensiones que se eligen en particular de una manera orientada a la carga y que se instalan o fijan, por un lado, en el brazo del robot y, por otro, en la herramienta. Es decisivo a este respecto el que el cambiador de herramientas de dos partes en sí separables sea suficiente en su zona de unión para la respectiva carga esperable. Orientándose a esto, se han desarrollado ya también y están en uso cambiadores de herramientas que contienen ensambladas formando una unidad, por ejemplo, tres partes de cambiador idénticas dispuestas como un conjunto triangular y acoplables una con otra, es decir, prácticamente tres cambiadores de herramientas individuales más pequeños a los que puede asociarse una pinza correspondientemente adaptada y también correspondientemente dotada de dimensiones mayores, que baste para la carga prefijada, por lo que en este ejemplo se distribuye la carga a absorber, dividida en tres partes, sobre los distintos cambiadores de herramientas. Por tanto, se presenta también en este "cambiador triple" ya conocido, que forma un unidad (véase la figura 6) , un elemento auxiliar que, en último término, está acomodado también solamente a una carga determinada. Por consiguiente, tanto en el mantenimiento de existencias de serie antes mencionado como en el cambiador triple seguidamente mencionado el conjunto está ligado a un considerable coste de fabricación y de mantenimiento de existencias, ya que todos estos cambiadores de herramientas están acomodados a un caso de carga determinado o a un intervalo de carga determinado.
La invención se basa en el problema de proporcionar, partiendo de un cambiador de herramientas de la clase citada en último lugar, una mejora respecto del coste de fabricación y mantenimiento de existencias.
Este problema se resuelve según la presente invención con un cambiador de herramientas dotado de las características contenidas en la reivindicación 1 independiente. Formas de realización y perfeccionamientos ventajosos se desprenden de las reivindicaciones subordinadas.
Como puede apreciarse, no se modifica aquí en nada la concepción básica de un cambiador de herramientas, pero sí en su asociación tanto al aparato de manipulación (robot) como a la herramienta. En otras palabras, se ha previsto ahora según la invención, por un lado, disponer de forma soltable una respectiva placa adaptadora entre los elementos del cambiador, a saber, la parte de alojamiento y la parte de enchufe, seguidamente denominadas partes de acoplamiento, y los elementos de disposición o soporte correspondientes, específicamente un brazo de robot, por un lado, y una herramienta, por otro, y, por otro lado, proveer estas placas adaptadoras con una trama múltiple de elementos de unión correspondiente a las distintas tramas de disposición de loe elementos de unión (seguidamente llamadas partes de conexión) . Se crea así la posibilidad de, adaptándose a una carga prefijada, disponer uno o varios cambiadores individuales en las placas adaptadoras de dimensiones correspondientemente grandes e inmovilizarlos de una manera adecuada. Por tanto, por trama múltiple ha de entenderse aquí un modelo de trama para elementos de unión que contenga el modelo de trama de las partes de conexión que presentan las partes de acoplamiento con lo que varios cambiadores de herramientas con sus respectivas partes y en un número correspondiente a la carga pueden ser asociados a las placas adaptadoras y fijados a éstas, pero eventualmente puede hacerse esto también con tan sólo un cambiador de herramientas. Por tanto, se suprime según la invención el mantenimiento de existencias o la utilización ya explicados y anteriormente practicados de cambiadores de herramientas acomodados a cargas determinadas. Para el fabricante y el proveedor de tales cambiadores de herramientas según la invención esto significa ventajosamente que en cierto modo se tiene que fabricar solamente un tamaño de cambiador de herramientas, pero que éste puede complementarse con tamaños de cambiadores idénticos y ensamblarse en la respectiva placa adaptadora.
El cambiador de herramientas según la invención y, por tanto, variable en función de la carga y sus perfeccionamientos ventajosos se explicarán seguidamente con más detalle ayudándose de la representación de ejemplos de realización en el dibujo.
Muestran esquemáticamente:
La figura 1, una unidad cambiadora;
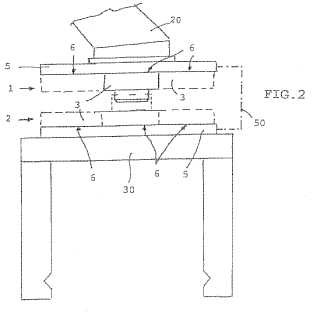
La figura 2, una unidad cambiadora dispuesta en un brazo de robot y una herramienta de mordazas;
La figura 3, en vista en planta, una placa adaptadora con unidades cambiadoras dispuestas en ella;
La figura 4, en vista en planta, disposiciones cambiadoras en una forma de realización especial;
La figura 5, en sección, un detalle de construcción y
La figura 6, vistas en planta por el lado de conexión de las partes superior e inferior de un cambiador de herramientas conocido.
Para la definición de los términos utilizados seguidamente hay que establecer de antemano lo siguiente: El cambiador de herramientas como un todo se denomina módulo cambiador en el que sus partes acoplables se denominan partes 1, 2 del módulo cambiador y en el que sus partes de recepción de carga, mutuamente enclavables por acoplamiento de conjunción de forma, se denominan partes de acoplamiento 4 y sus elementos de soporte se denominan partes de conexión 3 con las cuales las partes 1, 2 del módulo cambiador se pueden fijar a las placas adaptadoras 5 y éstas a su vez se puede fijar, por un lado, al brazo del robot y, por otro, a la herramienta.
Haciendo referencia a la figura 6, el cambiador de herramientas del cual se ha partido aquí como estado de la técnica está constituido por dos partes 1, 2 de módulo cambiador acoplables una con otra que están formadas cada una de ellas por una parte de conexión 3 y al menos una parte de acoplamiento 4 asociada a la parte de conexión 3. El término "al menos" tiene en cuenta en este caso que, como se representa en la figura 6, las partes de conexión 3 pueden estar equipadas aquí, por ejemplo, con tres partes de acoplamiento 4. Haciendo referencia a la figura 1, las partes de acoplamiento 4 dispuestas en sus partes de conexión 3 consisten, por un lado, en una pieza de inserción y, por otro, en una pieza de alojamiento en la que puede insertarse y enclavarse de manera adecuada la pieza de inserción.
Para el módulo cambiador según la invención es esencial ahora con referencia a las figuras 3 y 4 que las partes 1, 2 del mismo lleven asociadas de manera soltable por el lado de las partes de conexión una respectiva placa adaptadora 5 que presente varias zonas de fijación 6 para equiparse con un número deseado de partes 1, 2 de módulo cambiador.
Las piezas de las partes 1, 2 del módulo cambiador ilustradas también en la figura 2 en un aparato de manipulación 20 (brazo de robot) y en una herramienta 30 (pinza) consisten también en unidades de construcción relativamente pequeña que, por ejemplo, están diseñadas en cada caso por sí solas para únicamente una recepción de carga relativamente pequeña y que representan en cierto modo unidades básicas en el presente caso. Si se requiere ahora una mayor capacidad de carga, no se tiene que utilizar entonces,... [Seguir leyendo]
Reivindicaciones:
1. Cambiador de herramientas que consta de dos partes de módulo cambiador (1, 2) acoplables una con otra, las cuales están formadas cada una de ellas por una parte de conexión (3) y al menos una parte de acoplamiento (4) asociada a la parte de conexión (3) , caracterizado por que las partes (1, 2) del módulo cambiador llevan asociada de manera soltable por el lado de la parte de conexión una respectiva placa adaptadora (5) que presenta varias zonas de fijación (6) para equiparla con un número deseado de partes (1, 2) de módulo cambiador.
2. Cambiador de herramientas según la reivindicación 1, caracterizado por que las partes de conexión (3) están configuradas cada una de ellas con un contorno periférico poligonal (9) en el sentido de un ensamble de las partes de conexión (3) con sus placas adaptadoras (5) de una manera muy ampliamente exenta de huecos.
3. Cambiador de herramientas según la reivindicación 2, caracterizado por que el contorno periférico (9) de las partes de conexión (3) está configurado como un polígono simétrico, en particular rotacionalmente simétrico.
4. Cambiador de herramientas según la reivindicación 2 ó 3, caracterizado por que el contorno periférico (9) de las partes de conexión (3) está configurado como un hexágono.
5. Cambiador de herramientas según cualquiera de las reivindicaciones 1 a 4, caracterizado por que las partes de
conexión (3) están provistas de elementos de fijación (40) y estos elementos de fijación (40) están dispuestos según una trama determinada (7) , y las placas adaptadoras (5) están provistas de una trama múltiple (8) de elementos de fijación (40) que corresponde a esta trama (7) .
6. Cambiador de herramientas según cualquiera de las reivindicaciones 2 a 5, caracterizado por que las partes de conexión (3) están provistas, en su contorno periférico (9) , de unas conformaciones (10) para su inmovilización 20 mutua.
7. Cambiador de herramientas según cualquiera de las reivindicaciones 1 a 6, caracterizado por que las partes de conexión (3) que presentan las partes de acoplamiento enchufables (4) están provistas de conexiones mutuamente alineadas (11) para la alimentación de sus medios de servicio.
8. Cambiador de herramientas según la reivindicación 7, caracterizado por que al menos una de las partes de 25 conexión (3) está provista de un módulo de alimentación (12) para los medios de servicio.
9. Cambiador de herramientas según cualquiera de las reivindicaciones 1 a 8, caracterizado por que la placa adaptadora (5) está provista de canales y conexiones de medio de servicio para las partes de conexión (3) .
10. Cambiador de herramientas según cualquiera de las reivindicaciones 1 a 9, caracterizado por que las placas
adaptadoras (5) pueden unirse entre ellas por medio de una tubería soltable (50) de alimentación de medio de 30 servicio que conduce a la herramienta.
Estado de la técnica
Patentes similares o relacionadas:
Máquina de mecanizado con dispositivo de carga de piezas de trabajo, del 10 de Junio de 2020, de GEBR. HELLER MASCHINENFABRIK GMBH: Máquina de mecanizado : con un grupo de husillos posicionables giratoriamente o accionables de forma giratoria alrededor de ejes (26, 27, […]
Máquina herramienta, en particular máquina fresadora de husillos múltiples, del 6 de Mayo de 2020, de DECKEL MAHO PFRONTEN GMBH: Máquina herramienta con: - un bastidor de máquina ; - una instalación de fijación de la pieza de trabajo para el empotramiento de una […]
Procedimiento para la preparación de piezas de trabajo y máquina herramienta para la realización del procedimiento, del 22 de Enero de 2020, de STAMA MASCHINENFABRIK GMBH: Procedimiento para la mecanización de piezas de trabajo en una máquina herramienta con un husillo de trabajo desplazable con relación a un dispositivo […]
Dispositivo de procesamiento con una mesa de piezas de trabajo, del 6 de Noviembre de 2019, de HOMAG GmbH: Dispositivo de procesamiento , en particular para el procesamiento de piezas de trabajo de madera, de materiales de trabajo derivados de la madera, de […]
Dispositivo de mecanizado para piezas de trabajo y procedimiento para el mismo, del 4 de Septiembre de 2019, de HOMAG GmbH: Dispositivo de mecanizado para piezas de trabajo, en particular de madera, plástico o similar, con una primera mesa de piezas de trabajo que puede […]
Procedimiento para mecanizar piezas de trabajo en una máquina herramienta así como máquina herramienta para ello, del 21 de Agosto de 2019, de Ezu-Metallwaren GmbH & Co. KG: Procedimiento para el mecanizado, preferiblemente con arranque de virutas, de piezas de trabajo en una máquina herramienta con un husillo […]
 Pinza y procedimiento para fabricar una pinza, del 30 de Mayo de 2019, de ROHM GMBH: Pinza con dos flancos laterales , que están unidos entre sí directa o indirectamente en un extremo y entre ellos se extiende un espacio que incluye un medio […]
Pinza y procedimiento para fabricar una pinza, del 30 de Mayo de 2019, de ROHM GMBH: Pinza con dos flancos laterales , que están unidos entre sí directa o indirectamente en un extremo y entre ellos se extiende un espacio que incluye un medio […]
BRIDA DE SUJECIÓN NEUMÁTICA PARA UTILLAJES, del 17 de Mayo de 2019, de SARABIA TRILLA, Miquel: 1. Brida de sujeción neumática mejorada para sujetar mediante un pisador con una cierta presión/esfuerzo a una chapa o similar, siendo susceptible la brida de sujeción […]