PROCEDIMIENTO DE TRABAJO Y APARATO DE LIMPIEZA PARA LIMPIAR UNA PISCINA.
Procedimiento de trabajo para un aparato de limpieza (2) que va y viene de un lado a otro en una piscina (1),
con un mecanismo de traslación conmutable a marcha hacia delante o marcha hacia atrás y que está en unión efectiva con ruedas de accionamiento o cintas de traslación cada una con un motor para una parte del mecanismo de traslación del lado izquierdo y una del lado derecho, una instalación de control para controlar el mecanismo de traslación así como medios de contacto dispuestos en el lado delantero y en el lado trasero para generar señales de control en caso del choque del aparato de limpieza (2) con una pared (3) de la piscina o un obstáculo, presentando la instalación de control para cada parte del mecanismo de traslación una instalación de regulación de velocidad y medios para un control diferencial de la velocidad de los dos motores, y presentando el aparato de limpieza en ambas partes del mecanismo de traslación medios para medir las distancias recorridas en la travesía,
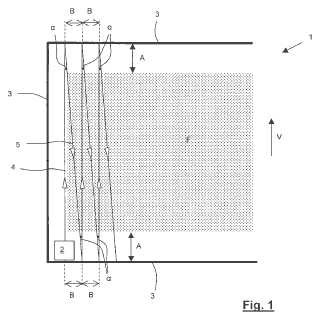
en lo cual la instalación de control controla el aparato de limpieza (2) de una manera que el aparato de limpieza (2) en un primer paso a partir de una posición de arranque marcha en una primera trayectoria de limpieza (4) en una dirección hacia delante (V) hasta chocar con una pared (3) de la piscina, siendo medida o calculada la distancia (D1) recorrida en la primera trayectoria de limpieza,
y el aparato de limpieza (2) en un segundo paso es conducido en una segunda trayectoria de limpieza (5) desviada o desplazada de la primera trayectoria de limpieza (4),
caracterizado porque la instalación de control controla el aparato de limpieza 2 de una manera que
- el aparato de limpieza (2) en el primer paso marcha con una velocidad pequeña en la primera trayectoria de limpieza (4),
- el aparato de limpieza en el segundo paso es conducido primero con pequeña velocidad en la segunda trayectoria de limpieza (5) y luego marcha con mayor velocidad en una dirección hacia atrás, hasta que la distancia recorrida (Dz) es menor en un espacio (A) que la distancia (D1) recorrida en el paso precedente,
- el aparato de limpieza (2) al alcanzar la distancia (Dz) marcha de nuevo con pequeña velocidad en la segunda trayectoria de limpieza (5) hasta chocar con una pared (3) de la piscina, siendo medida o calculada la distancia (D2) recorrida en la segunda trayectoria de limpieza,
y - el aparato de limpieza (2) en cada otro paso es controlado como en el paso precedente.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07405051.
Solicitante: 3S SYSTEMTECHNIK AG.
Nacionalidad solicitante: Suiza.
Dirección: BRUNNMATTSTRASSE 456 5236 REMIGEN SUIZA.
Inventor/es: SOMMER, HANS-RUDOLF, SOMMER, PETER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E04H4/16 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04H EDIFICIOS O CONSTRUCCIONES SIMILARES PARA EMPLEOS PARTICULARES; PISCINAS PARA NADAR O PARA CHAPOTEAR; MASTILES; BARRERAS; TIENDAS O REFUGIOS PROVISIONALES, EN GENERAL (cimentaciones E02D). › E04H 4/00 Piscinas para nadar o para chapotear (generadores de olas en las bañeras A47K 3/10; separación de B01D; tratamiento del agua C02F; bombas que producen olas F04D 35/00). › especialmente adaptados para la limpieza de las piscinas para nadar o para chapotear (dispositivos de limpieza especiales para barcos B63B 59/00).
PDF original: ES-2376594_T3.pdf
Fragmento de la descripción:
Procedimiento de trabajo y aparato de limpieza para limpiar una piscina.
El invento se refiere a un procedimiento de trabajo para un aparato de limpieza que va y viene de un lado a otro en una piscina según la reivindicación 1 así como a un aparato de limpieza para realizar el procedimiento de trabajo según la reivindicación 9.
El invento se refiere especialmente a un aparato de limpieza que va y viene de un lado a otro en una piscina, con un mecanismo de traslación que puede cambiar la marcha hacia delante o hacia atrás y que está en unión efectiva con ruedas de accionamiento o cintas de traslación cada una con un motor para una parte del mecanismo de traslación del lado izquierdo y una del lado derecho. Además existen también una instalación de control para controlar el mecanismo de traslación así como medios de contacto dispuestos en el lado delantero y en el lado trasero para generar señales de control en caso del choque del aparato de limpieza con una pared de la piscina o un obstáculo. Además la instalación de control para cada parte del mecanismo de traslación o cada uno de los dos motores tiene una instalación de regulación de velocidad y medios para un control diferencial de la velocidad de los dos motores. Además el aparato de limpieza en ambas partes del mecanismo de traslación tiene medios para medir las distancias recorridas en la travesía. Un ejemplo de un aparato de limpieza semejante está dado a conocer en el documento EP0 989 256. Aparatos de limpieza de esta clase pueden emplearse en piscinas de las más distintas formas, puesto que debido a su modo de construcción y a los procedimientos de trabajo aplicados no necesitan ninguna pared de piscina de referencia para la alineación.
El control diferencial de la velocidad en el documento EP-0 989 256 está aplicado de manera que los dos motores durante la travesía son controlables de modo que al menos temporalmente, es decir, durante los cambios de dirección a realizar, son accionados con distintos números de revoluciones constantes, para así obtener ángulos de cambio de dirección controlados. El ángulo de cambio de dirección a obtener es calculable en base a la diferencia del número de revoluciones, porque el camino recorrido es medido en ambas partes del mecanismo de traslación y las diferentes longitudes de arco son por lo tanto conocidas. Aunque para las fases de arranque están previstas funciones en rampa para el desarrollo de la velocidad, los cambios de dirección se efectúan en esencia con la velocidad de marcha que se emplea para la limpieza de la piscina.
Se ha demostrado sin embargo que en aparatos de limpieza de piscinas de esta clase se presentan muy frecuentemente con todo desviaciones que progresivamente se hacen mayores de la dirección de movimiento ajustada al principio (dirección de trayectoria) . Este puede ser el caso especialmente en piscinas grandes, por ejemplo piscinas de 50 metros, que requieren un gran número de pasos de limpieza. Las investigaciones han probado que los aparatos de limpieza, en cada caso al atascarse en un borde de la piscina u otro obstáculo por la brusca frenada o el choque la mayor parte de las veces, aun cuando sólo pequeño, experimentan un desplazamiento hacia atrás o giro. Con el número de frenadas bruscas en aumento se acumulan estos errores de trayectoria. En la mayoría de los casos siguen empleándose como medios de contacto instalaciones mecánicas, porque particularmente en agua turbia otros sensores, por ejemplo los de base óptica, rápidamente dejan de funcionar o suministran resultados no fiables. Es frecuente también por añadidura que el recorrido de amortiguación del elemento de conmutación mecánico en comparación con el recorrido de frenada necesario del aparato de limpieza sea demasiado pequeño, de manera que los desplazamientos al chocar debido a la inercia del aparato de limpieza aún se amplifican.
El problema del invento es especificar un procedimiento de trabajo para un aparato de limpieza de piscinas del género indicado con el que la exactitud del cumplimiento de las trayectorias de limpieza (estabilidad del modelo de traslación) y con ella la calidad y fiabilidad de limpieza de la piscina se pueda mejorar más. Además el procedimiento de trabajo tiene que ser igualmente bien apropiado tanto para piscinas rectangulares grandes como para piscinas de forma irregular.
Este problema es solucionado mediante las particularidades caracterizadoras de la reivindicación independiente 1 del procedimiento y las particularidades de la reivindicación independiente 9 del dispositivo.
El procedimiento de trabajo según el invento implica que un aparato de limpieza de piscinas del género indicado es controlado por una instalación de control del aparato de limpieza de una manera que
- el aparato de limpieza en un primer paso de limpieza a partir de una posición de arranque marcha con una
velocidad pequeña en una primera trayectoria de limpieza en una dirección hacia delante V hasta chocar con una pared de la piscina, siendo medida o calculada la distancia D1 recorrida en la primera trayectoria de limpieza, -el aparato de limpieza luego en un segundo paso de limpieza primero con velocidad pequeña es conducido en una segunda trayectoria de limpieza desviada o desplazada de la primera trayectoria de limpieza y el aparato de limpieza luego en la segunda trayectoria de limpieza marcha a mayor velocidad en una dirección hacia atrás, hasta que la distancia recorrida Dz es menor en un espacio A que la distancia D1 recorrida en el paso precedente, -el aparato de limpieza finalmente al alcanzar la distancia Dz marcha de nuevo a pequeña velocidad en la segunda trayectoria de limpieza hasta chocar con una pared de la piscina, siendo medida o calculada la distancia D2 recorrida en la segunda trayectoria de limpieza, y -el aparato de limpieza en cada otro paso es controlado como en el paso precedente. El aparato de limpieza según el invento para realizar el procedimiento de trabajo antes citado implica que en un aparato de limpieza del género indicado los motores son controlables por la instalación de control con al menos una velocidad pequeña y al menos una grande. Mediante la conmutación desde una velocidad de traslación grande a una velocidad de traslación pequeña en la aproximación a una pared de la piscina se consigue que los errores de situación y especialmente los errores de situación acumulados tras una multiplicidad de "incidentes de choque" en una pared de la piscina se reduzcan considerablemente. Con respecto a la aproximación a una pared de la piscina se parte de la suposición de que la distancia a recorrer en una trayectoria de limpieza respectivamente siguiente y adyacente incluso en piscinas configuradas irregularmente por regla general no puede ser esencialmente diferente de la precedente en cada caso, de manera que es suficiente reducir la velocidad de marcha sólo en el registro de un tramo con respecto al recorrido en el paso precedente y disminuido en un espacio A. En la práctica se han dado buenos resultados con velocidades de marcha de 0, 2 a 0, 25 m/s y un espacio A elegido de 0, 5 m en lo referente a una mejora de la exactitud del cumplimiento de las trayectorias de limpieza.
Con excepción de una zona de borde en la zona de las paredes de la piscina pueden por lo tanto en la zona superficial total de la piscina emplearse velocidades de limpieza mayores.
De ese modo se consiguen tiempos de limpieza más cortos y por lo tanto también ahorros de energía. Al mismo tiempo se consigue un modelo de traslación más estable y de ese modo una limpieza mejor y más fiable.
Resultan mejoras concretas especialmente si la velocidad de marcha pequeña del aparato de limpieza en la zona del borde de la piscina se dimensiona de manera que el recorrido de frenada del aparato de limpieza en la velocidad pequeña sea menor que el recorrido de amortiguación E del elemento de conmutación mecánico empleado (medios de contacto) . Con ello se consigue que la masa del aparato de limpieza pueda llegar a detenerse controladamente. De esa manera se reducen las repercusiones de "incidentes de choque" que empeoran el modelo de traslación.
Otra alternativa es naturalmente también el empleo de sensores que trabajan sin contacto, que pueden emplearse autónoma o también adicionalmente a los medios de contacto que actúan mecánicamente. Para también aquí conseguir una parada controlada del aparato de limpieza, los sensores que trabajan sin contacto deben presentar una distancia de reacción A, que sea mayor que el recorrido de frenada del aparato de limpieza con velocidad pequeña. Puesto que... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de trabajo para un aparato de limpieza (2) que va y viene de un lado a otro en una piscina (1) , con un mecanismo de traslación conmutable a marcha hacia delante o marcha hacia atrás y que está en unión efectiva con ruedas de accionamiento o cintas de traslación cada una con un motor para una parte del mecanismo de traslación del lado izquierdo y una del lado derecho, una instalación de control para controlar el mecanismo de traslación así como medios de contacto dispuestos en el lado delantero y en el lado trasero para generar señales de control en caso del choque del aparato de limpieza (2) con una pared (3) de la piscina o un obstáculo, presentando la instalación de control para cada parte del mecanismo de traslación una instalación de regulación de velocidad y medios para un control diferencial de la velocidad de los dos motores, y presentando el aparato de limpieza en ambas partes del mecanismo de traslación medios para medir las distancias recorridas en la travesía, en lo cual la instalación de control controla el aparato de limpieza (2) de una manera que el aparato de limpieza
(2) en un primer paso a partir de una posición de arranque marcha en una primera trayectoria de limpieza (4) en una dirección hacia delante (V) hasta chocar con una pared (3) de la piscina, siendo medida o calculada la distancia (D1) recorrida en la primera trayectoria de limpieza, y el aparato de limpieza (2) en un segundo paso es conducido en una segunda trayectoria de limpieza
(5) desviada o desplazada de la primera trayectoria de limpieza (4) ,
caracterizado porque la instalación de control controla el aparato de limpieza 2 de una manera que
- el aparato de limpieza (2) en el primer paso marcha con una velocidad pequeña en la primera trayectoria de limpieza (4) ,
- el aparato de limpieza en el segundo paso es conducido primero con pequeña velocidad en la segunda trayectoria de limpieza (5) y luego marcha con mayor velocidad en una dirección hacia atrás, hasta que la distancia recorrida (Dz) es menor en un espacio (A) que la distancia (D1) recorrida en el paso precedente,
- el aparato de limpieza (2) al alcanzar la distancia (Dz) marcha de nuevo con pequeña velocidad en la segunda trayectoria de limpieza (5) hasta chocar con una pared (3) de la piscina, siendo medida o calculada la distancia (D2) recorrida en la segunda trayectoria de limpieza, y
- el aparato de limpieza (2) en cada otro paso es controlado como en el paso precedente.
2. Procedimiento de trabajo según la reivindicación 1, caracterizado porque los medios de contacto son elementos de conmutación mecánicos amortiguadores con un recorrido de amortiguación (E) y el recorrido de frenada del aparato de limpieza (2) con velocidad pequeña es menor que el recorrido de amortiguación (E) .
3. Procedimiento de trabajo según la reivindicación 1, caracterizado porque los medios de contacto son sensores que trabajan sin contacto con una distancia de reacción (A) y el recorrido de frenada del aparato de limpieza (2) con velocidad pequeña es menor que la distancia de reacción (A) .
4. Procedimiento de trabajo según una de las reivindicaciones 1 a 3, caracterizado porque se emplean simultáneamente distintos tipos de medios de contacto para elevar la seguridad de funcionamiento.
5. Procedimiento de trabajo según una de las reivindicaciones 1 a 4, caracterizado porque el control diferencial de la velocidad de los dos motores permite tanto diferentes velocidades como diferentes sentidos de giro, posibilitando esto último también el giro en el sitio mediante velocidades opuestas igual de grandes.
6. Procedimiento de trabajo según una de las reivindicaciones 1 a 5, caracterizado porque el aparato de limpieza (2) por medio del control diferencial de la velocidad de los dos motores es conducido con al menos uno de un número de procedimientos parciales que están a disposición en una trayectoria de limpieza desviada o desplazada de una trayectoria de limpieza precedente.
7. Procedimiento de trabajo según la reivindicación 6, caracterizado porque con un primer procedimiento parcial el aparato de limpieza (2) es conducido en una trayectoria de limpieza que se desarrolla inclinada respecto a la trayectoria de limpieza precedente.
8. Procedimiento de trabajo según la reivindicación 6, caracterizado porque con un segundo procedimiento parcial el aparato de limpieza (2) es conducido en una trayectoria de limpieza que se desarrolla en esencia paralela respecto a la trayectoria de limpieza precedente.
9. Aparato de limpieza (2) que puede ir y venir de un lado a otro en una piscina para realizar un procedimiento de trabajo según la reivindicación 1, con un mecanismo de traslación conmutable a marcha hacia delante o marcha hacia atrás y que está en unión efectiva con ruedas de accionamiento o cintas de traslación cada una con un motor para una parte del mecanismo de traslación del lado izquierdo y una del lado derecho, una
instalación de control para controlar el mecanismo de traslación así como medios de contacto dispuestos en el lado delantero y en el lado trasero para generar señales de control en caso del choque del aparato de limpieza con una pared de la piscina o un obstáculo, presentando la instalación de control para cada parte del mecanismo de traslación, una instalación de regulación de velocidad y medios para un control diferencial de la velocidad de los dos motores, y presentando el aparato de limpieza (2) en ambas partes del mecanismo de traslación medios para medir las distancias recorridas en la marcha, siendo los motores controlables por la instalación de control con al menos una velocidad pequeña y al menos una grande, y en lo cual la instalación de control controla el aparato de limpieza (2) de una manera que -el aparato de limpieza (2) en un primer paso a partir de una posición de arranque marcha en la primera trayectoria de limpieza (4) en una dirección hacia delante (V) hasta chocar con una pared (3) de una piscina, siendo medida la distancia recorrida (D1) ,
- el aparato de limpieza en un segundo paso es conducido en una segunda trayectoria de limpieza (5) desviada o desplazada de la primera trayectoria de limpieza (4) , caracterizado porque la instalación de control controla el aparato de limpieza (2) de una manera que
- el aparato de limpieza (2) en el primer paso en la primera trayectoria de limpieza (4) marcha con una velocidad pequeña, siendo medida la distancia recorrida (D1) ,
- el aparato de limpieza (2) en el segundo paso es conducido primero con pequeña velocidad en la segunda trayectoria de limpieza (5) y luego en la segunda trayectoria de limpieza (5) marcha a velocidad grande en una dirección hacia atrás, hasta que la distancia recorrida (Dz) es menor en un espacio (A) que la distancia (D1) recorrida en el paso precedente,
- el aparato de limpieza (2) al alcanzar la distancia (Dz) marcha de nuevo con pequeña velocidad en la segunda trayectoria de limpieza (5) hasta chocar con una pared (3) de la piscina, siendo medida o calculada la distancia (D2) recorrida en la segunda trayectoria de limpieza, y
- el aparato de limpieza (2) en cada otro paso es controlado como en el paso precedente.
10. Aparato de limpieza (2) según la reivindicación 9, caracterizado porque los motores son controlables por la instalación de control con velocidades opuestas igual de grandes.
11. Aparato de limpieza (2) según la reivindicación 9 o 10, caracterizado porque los medios de contacto son elementos de conmutación mecánicos amortiguadores y/o sensores que trabajan sin contacto.
12. Aparato de limpieza (2) según una de las reivindicaciones 9 a 11, caracterizado porque con la instalación de control puede realizarse al menos un procedimiento parcial para conducir el aparato de limpieza (2) en una trayectoria de limpieza desviada o desplazada de una trayectoria de limpieza precedente.
13. Aparato de limpieza (2) según una de las reivindicaciones 9 a 12, caracterizado porque existe una brújula.
Patentes similares o relacionadas:
Vehículo de limpieza de piscinas automatizado con elementos de depuración rotatorios y estacionarios, del 15 de Julio de 2020, de Upward Sales Limited: Vehículo de limpieza de piscinas (PCV) completamente sumergible y automatizado para desinfectar el agua de una piscina, donde el PCV comprende: una carcasa […]
Robot de limpieza de piscinas que tiene una unidad de filtrado y un sensor, del 24 de Junio de 2020, de MAYTRONICS LTD.: Un robot de limpieza de piscinas, que comprende: una unidad de filtrado para filtrar fluido que pasa a través de la unidad […]
Robot de limpieza de piscinas con empujes de chorro direccionales, del 10 de Junio de 2020, de MAYTRONICS LTD.: Un limpiador de piscinas que comprende: una carcasa ; un motor de accionamiento que está configurado para ayudar a mover el limpiador […]
Limpiador de piscinas con oruga rodante ajustable para controlar la velocidad del flujo de agua, del 10 de Junio de 2020, de Forever Vanture Technology Limited: Limpiador de piscinas que comprende: una carcasa con una entrada formada en una sección inferior de la misma; […]
Método y aparato para proporcionar señales eléctricas relacionadas con la orientación desde un limpiador robótico de piscinas que tiene un sensor de orientación a una fuente de alimentación remota a través de un cable de dos hilos, del 3 de Junio de 2020, de AQUA PRODUCTS INC.: Método para limpiar una superficie de una piscina con un limpiador robótico de piscinas que tiene un motor eléctrico para mover el limpiador (100, […]
Método para operar un robot de limpieza de piscinas interactivo, del 27 de Mayo de 2020, de MAYTRONICS LTD.: Un método para operar un robot de limpieza de piscinas, el método comprende: recibir, procedente de un usuario y mediante […]
Robot limpiador de piscinas, del 13 de Mayo de 2020, de MAYTRONICS LTD.: Un robot limpiador que comprende: un alojamiento que comprende una entrada de fluido, una salida de fluido, un borde trasero y un borde […]
Dispositivo de lavado para recibir una solución de lavado de una tubería y procedimiento de lavado de la tubería, del 29 de Abril de 2020, de A.P.F. Aqua System AG: Dispositivo de lavado para recibir una solución de lavado de una tubería, en el que el dispositivo de lavado presenta: un elemento base […]