SISTEMA Y MÉTODO PARA LA LOCALIZACIÓN Y COMUNICACIÓN DE ALERTAS PARA TRÁFICO.
Sistema y método para la localización y comunicación de alertas para tráfico.
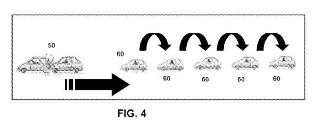
Sistema (70) para la transmisión y recepción en tiempo real de alertas en carretera entre al menos un foco de peligro (50), que transmite el tipo, características y localización del foco de peligro, y al menos un vehículo (60) que se aproxima a dicho foco de peligro (50), y que recibe, procesa y alerta al conductor sobre el peligro y la posición relativa en que se encuentra, tal que el sistema (70) comprende: un módulo de navegación (2) que permite establecer la posición geográfica del foco de peligro (50) o la de los vehículos (60) que se aproximan al mismo; un módulo (4) indicador de avisos que genera señales de información sobre el estado del sistema (70), un módulo de comunicaciones (5) que permite la transmisión y recepción de los mensajes de alerta que transmiten la información sobre el foco de peligro (50), y una Unidad de Control Digital (DCU) (1) que, interactuando con el módulo de navegación (2), con el módulo de comunicaciones (5) y con el módulo (4) indicador, gestiona la activación y operación del sistema (70) como foco de peligro, o que, procesando los mensajes de alerta recibidos desde otros vehículos (60) del entorno y generando los avisos que informen de la existencia de un foco de peligro (50), actúa como sistema en riesgo. Además, la invención se refiere a un método para la localización y comunicación de alertas para tráfico que emplea un sistema (70) tal, así como a un vehículo (60) que comprende un sistema (70) como el descrito.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200930872.
Solicitante: INTA, INSTITUTO NACIONAL DE TÉCNICA AEROESPACIAL.
Nacionalidad solicitante: España.
Inventor/es: OLMEDO SOLER,RAFAEL MARÍA, DE MIGUEL DEL VALLE,PABLO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G08G1/16 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas anticolisión.
Fragmento de la descripción:
Sistema y método para la localización y comunicación de alertas para tráfico.
Campo de la invención
La presente invención se refiere a un sistema para la localización y la comunicación en tiempo real de alertas en carretera para los vehículos que se encuentren cercanos a un foco de peligro, así como a un método para la utilización de un sistema tal.
Antecedentes de la invención
Cada año los accidentes de tráfico matan a más de un millón de personas en el mundo, constituyendo una de las principales causas de mortalidad en Europa. Muchos de estos accidentes están ocasionados por condiciones de baja visibilidad debidas a la niebla, al mal tiempo, o por la presencia en las carreteras de obstáculos o situaciones especiales tales como vehículos lentos, transportes especiales, trabajos de mantenimiento u obras en la carretera, etc. Muchos de estos accidentes generan a su vez nuevos accidentes, que pueden llegar a implicar a un gran número de vehículos. Por otro lado, los accidentes de tráfico provocan retenciones, llegando muchas veces a producir situaciones caóticas cuyas consecuencias son altos costes, tanto sociales como económicos.
Existen sistemas conocidos, como por ejemplo el descrito en JP2006277598. El objetivo de esta patente es un sistema que permita a los vehículos de emergencia notificar su destino a los demás automóviles. El sistema comprende un aparato central que envía información de ruta que representa una ruta planificada de un vehículo de emergencia, así como información de ruta local que excluye al menos el destino de la ruta planificada de la información de ruta, comprendiendo además una baliza para enviar información a los dispositivos instalados en un vehículo normal, y al vehículo de emergencia, respectivamente. La baliza identifica si los vehículos que comprenden los dispositivos anteriores son o no el vehículo de emergencia: en el caso de que se identifique que se trata del vehículo de emergencia, se envía la información de ruta al dispositivo del vehículo; en el caso de que no se identifique el vehículo de emergencia, se envía al dispositivo del vehículo la información de ruta local. Sin embargo, no se trata de un sistema que permita que los vehículos (cualquier vehículo, no sólo los de emergencia) se informen entre sí de cualquier tipo de incidencia, con suficiente tiempo de antelación y en tiempo real, ayudándose a reducir el riesgo de accidente. En este sistema no se transmite la información relativa a la causa de la incidencia o la posición de la misma, ni se permite una activación manual o automática de la transmisión, ni cubre escenarios de información procedentes de vehículos que no sean de emergencia ni otros posibles elementos presentes en la carretera.
En otros documentos conocidos, como es el caso de GB 200318040, se describe un sistema para alertar a los demás conductores de incidencias en carretera y vehículos de emergencia. El sistema incluye un transmisor RDS (sistema de decodificación de información viaria), un receptor RDS y una antena transmisora. Se pueden transmitir tanto mensajes de texto como de audio, empleando mensajes programados o entradas directas. La antena es direccional, estando diseñada para producir una transmisión más fuerte hacia delante que hacia los lados. Este sistema no contempla el uso de sistemas de localización del tipo GNSS (Sistemas de navegación por satélite, como es el GPS) ni un entorno cooperativo y de comunicación entre vehículos que permita una transmisión detallada de localización e identificación de los incidentes ocurridos en carretera.
El documento DE 10242644 describe un sistema de transmisión de señales de emergencia que se emplea en tráfico, y que comprende un transmisor de radio dispuesto en un vehículo de emergencia y un receptor en cualquier otro vehículo ordinario. Cuando el receptor recibe una señal de emergencia, dispara una señal en la electrónica de a bordo del citado vehículo del usuario. Su uso restringe la transmisión de señales a vehículos de emergencia. Este sistema alerta a los conductores de la presencia de un vehículo de emergencia, pero no contempla la provisión de información relativa a otro tipo de incidencias que puedan presentarse en carretera. Este sistema no contempla la identificación de la localización del vehículo de emergencia o informar al conductor del vehículo ordinario sobre la posición relativa al mismo.
Otros documentos, como el DE 10233377, describen un sistema de información y alertas de tráfico que permite la planificación de rutas para reaccionar a las condiciones en carretera. El sistema descrito tiene entrada desde un sistema de posicionamiento global, GPS, y un decodificador receptor de radio, proporcionando ambos entrada a un microprocesador. La radio proporciona información de datos de tráfico relativos a las actuales condiciones de circulación, que son almacenados y empleados junto con datos de mapas para establecer la ruta más apropiada para llegar a un destino específico, permitiéndose así la adaptación a diversas condiciones de carretera y de tráfico. El sistema no opera como un sistema de alertas en tiempo real ya que la información de tráfico vía radio no es una información generada en tiempo real por los propios vehículos. El objetivo principal del sistema es un planificador de rutas, no un sistema de prevención de accidentes. El sistema no contempla soluciones de localización en caso de pérdida de cobertura GPS, como en el caso de túneles, o el uso de soluciones avanzadas de navegación basadas en el uso de sistemas de aumentaciones GNSS (del tipo EGNOS) o integración del receptor GPS con sensores de navegación autónomos del tipo inercial (INS). El sistema descrito en DE 10233377 no interactúa con el bus CAN del vehículo y por tanto no permite obtener información del vehículo.
Existen dispositivos de aviso en el caso de que ocurran colisiones de tráfico, como el del documento CN 101178846. Este sistema se basa en la utilización de múltiples sensores de detección y contempla la transmisión de señales de aviso que comprenden información variada, y son especialmente útiles en puntos de baja visibilidad y en los denominados "puntos negros" de tráfico. El sistema descrito en CN 101178846 no es un sistema cooperativo en el que los conductores y/o usuarios de las carreteras puedan transmitir cualquier tipo de incidencia presente que pueda suponer riesgo de accidentes, atropellos o colisiones, ni se apoya en el uso de sistema de localización y navegación para identificar la posición de la incidencia.
Existen otros sistemas, como por ejemplo el descrito en EP1914701, para prevención de accidentes de tráfico y basado en la utilización de la red de telefonía móvil, avisando dicha red al conductor de los parámetros de seguridad (por ejemplo, máxima velocidad permitida) para el punto de la carretera en el que el foco de peligro o alerta se encuentra. Este sistema no contempla comunicaciones de alertas directas entre el foco de la alerta y los vehículos del entrono. En la medida que depende de las infraestructuras y redes de comunicaciones de telefonía móvil, el sistema no opera de manera autónoma ni en tiempo real.
El sistema A.B.A (Accident and Breakdown Alert), descrito también en el documento U200702514, permite a los vehículos accidentados o averiados en cualquier vía, avisar y dar a conocer su situación a los demás vehículos que circulan por la misma en tiempo real. La solución empleada para la localización de vehículo accidentado o averiado no se basa en el empleo de sistema de localización y navegación por satélite (GNSS) del tipo GPS, o sistemas de navegación autónomos del tipo INS Por tanto, al no disponer de estas tecnologías el sistema no permite identificar la posición geográfica absoluta de la incidencia ni de los vehículos del entorno, ni permite el cálculo de la distancia y orientación respecto de la misma a partir de las localizaciones y parámetros de navegación GNSS. Este sistema sólo avisa de accidentes y averías, pero no alerta a los conductores sobre otros tipos de incidencia que se produce en su área de interés, como podrían ser obras en carretera, presencia de vehículos o transportes especiales, ciclistas, etc. Este sistema requiere además infraestructuras adicionales: repetidores en túneles. Este sistema no permite interactuar con otros dispositivos o sensores del vehículo ni aprovechar la información generada en las centralitas electrónicas del vehículo y que está presente en el BUSCAN, como pueda ser la información de la señal de activación del Airbag, que podría ser utili- zada para activar el sistema...
Reivindicaciones:
1. Sistema (70) para la transmisión y recepción en tiempo real de alertas en carretera entre al menos un foco de peligro (50), que transmite el tipo, características y localización del foco de peligro, y al menos un vehículo (60) que se aproxima a dicho foco de peligro (50), y que recibe, procesa y alerta al conductor sobre el peligro y la posición relativa en que se encuentra, tal que el sistema (70) comprende:
2. Sistema (70) según la reivindicación 1 en el que la Unidad de Control Digital (DCU) (1) gestiona el procesado (6) de la activación y operación del sistema (70) como foco de peligro de forma automática, a partir del procesado (7) de localización y navegación de las informaciones del módulo de navegación (2) y/o de unos sensores o unidades de navegación (20) externas al sistema (70).
3. Sistema (70) según la reivindicación 1 en el que la Unidad de Control Digital (DCU) (1) gestiona el procesado (6) de la activación y operación del sistema (70) como foco de peligro de forma manual, mediante un selector de incidencias (3) que permite la actuación sobre el sistema (70) a efectos de activar de forma manual la condición de foco de peligro (50) y seleccionar el tipo de alerta, iniciándose la transmisión del mensaje de alerta.
4. Sistema (70) según cualquiera de las reivindicaciones anteriores, en el que el módulo de navegación (2) es del tipo GNSS.
5. Sistema (70) según la reivindicación 4 en el que el módulo de navegación (2) comprende además sensores de navegación adicionales que mejoran las capacidades del dispositivo de posicionamiento GNSS.
6. Sistema (70) según la reivindicación 5 en el que los sensores de navegación adicionales son de tipo inercial y actúan como sensores de activación automática de la condición de foco de peligro (50) en el sistema (70).
7. Sistema (70) según la reivindicación 5 en el que los sensores de navegación adicionales son de tipo autónomo.
8. Sistema (70) según cualquiera de las reivindicaciones anteriores, en el que el procesado (7) de localización y navegación de los parámetros de navegación del sistema (70) realizado por la Unidad de Control Digital (DCU) (1) se realiza a partir de los datos obtenidos del módulo de navegación (2), pudiendo manejarse estos datos de forma independiente o integrarse con las entradas de datos de navegación procedentes de sensores o unidades de navegación (20) externas al sistema (70) a través de cualquier bus de datos del vehículo o interfaces dedicados.
9. Sistema (70) según cualquiera de las reivindicaciones anteriores, en el que el procesado de la activación de la condición de foco de peligro en el sistema (70) realizado por la Unidad de Control Digital (DCU) (1) se realiza a través del procesado (6) de activación de alerta, de acuerdo a las entradas del selector de incidencias manual (3), de los datos del módulo de navegación (2), o de las entradas de activación generadas por las unidades (20) externas al sistema (70).
10. Sistema (70) según cualquiera de las reivindicaciones anteriores, en el que la Unidad de Control Digital (DCU) (1) genera también un mensaje de alerta para el caso de una retransmisión por parte de un vehículo (60) de un mensaje de alerta procedente de un foco de peligro (50), a efectos de cubrir un área de alerta determinada.
11. Sistema (70) según cualquiera de las reivindicaciones anteriores, en el que la Unidad de Control Digital (DCU) (1) procesa el mensaje de alerta a través del procesado (9) del mensajes de alerta , identificándose también, junto con el procesado del mensaje la necesidad y configuración del mensaje de retransmisión, y necesidad y procesado de mensajes de aviso al conductor, tal que el sistema (70) sólo genera avisos cuando suponga un riesgo para el conductor del vehículo (60), pudiendo no darse el caso en situaciones tales como que el vehículo (60) se aleje del foco de peligro (50) en lugar de acercarse a él.
12. Sistema (70) según cualquiera de las reivindicaciones anteriores, en el que la generación y configuración de los avisos por parte de la Unidad de Control Digital (DCU) (1) se hacen llegar al módulo (4) indicador del sistema (70) o a dispositivos (40) externos o ajenos al sistema (70).
13. Sistema (70) según cualquiera de las reivindicaciones anteriores en el que la información de localización transmitida en el mensaje de alerta se programa de forma manual o se registra previamente en la localización del foco de peligro (50), siendo dicha información de localización diferente a la del emplazamiento del dispositivo transmisor de la alerta.
14. Sistema (70) según cualquiera de las reivindicaciones anteriores en el que en el mensaje de navegación se transmite información relevante correspondiente al foco de peligro (50), con el fin de dar una información más completa a los vehículos (60) en riesgo que se aproximen.
15. Sistema (70) según cualquiera de las reivindicaciones anteriores en el que en caso de recepción de alertas en carretera, el sistema (70) genera una salida relativa a los focos de peligro (50) y compatible con el canal digital de información sobre el estado del tráfico TMC (Traffic Message Channel).
16. Sistema (70) según cualquiera de las reivindicaciones anteriores en el que, para el caso de peatones y usuarios de la vía, conlleva una implementación simplificada, permitiendo, en situaciones de peligro, alertar de la presencia de los citados peatones y usuarios a los conductores de los vehículos (60) que se aproximen, con el fin de reducir el riesgo de atropellos.
17. Método para la transmisión y recepción en tiempo real de alertas en carretera entre un foco de peligro (50) y los vehículos (60) que se aproximan a dicho foco de peligro (50), mediante el uso de sistemas (70) según cualquiera de las reivindicaciones 1 a 16, comprendiendo este método las siguientes etapas:
18. Método según la reivindicación 17, en el que la etapa a) comprende además las siguientes subetapas:
19. Método según la reivindicación 17 ó la reivindicación 18, en el que la etapa b) comprende además las siguientes subetapas:
20. Vehículo (60) que comprende un sistema (70) para la transmisión y recepción en tiempo real de alertas en carretera entre un foco de peligro (50) y los vehículos (60) que se aproximan a dicho foco de peligro (50), según cualquiera de las reivindicaciones 1 a 16.
Patentes similares o relacionadas:
DISPOSITIVO LUMÍNICO ACÚSTICO DE EMERGENCIA Y ALERTA TEMPRANA, del 30 de Julio de 2020, de CALOMARDE LORENTE, Daniel: Dispositivo lumínico acústico de emergencia y alerta temprana consistente en un conjunto de elementos destinados a informar en alerta temprana […]
Sistema anti acoso y anti colisión trasero para vehículos motorizados, del 20 de Julio de 2020, de ARBEX CALLES, Juan Ignacio: El sistema anti acoso y anti colisión trasero para vehículos motorizados, pretende disuadir, educar y si fuera necesario facilitar la identificación del infractor, […]
Procedimiento y sistema de aviso de colisión para la detección de vehículos en dirección contraria, del 24 de Junio de 2020, de Siemens Mobility GmbH: Procedimiento para la detección de vehículos de transporte en dirección contraria en un sistema de transporte con rutas fijas, que presenta las […]
Sistema de visualización de un vehículo, del 24 de Junio de 2020, de LEIA INC: Un sistema de vigilancia de vehículos que comprende: un escáner tridimensional 3D, configurado para escanear una región adyacente […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
MÉTODO Y SISTEMA PARA CONTROLAR UNA PLURALIDAD DE VEHÍCULOS AUTÓNOMOS, del 11 de Junio de 2020, de SEAT, S.A.: La presente invención se refiere a un método para controlar una pluralidad de vehículos autónomos, donde el método comprende las etapas de determinar una situación […]
DISPOSITIVO ELECTRÓNICO DE SEGURIDAD, del 20 de Marzo de 2020, de PETRONICS TECNOLOGIA S.L: Dispositivo electrónico de seguridad independiente del vehículo apto para ser fijado al vehículo que comprende una cámara de video que grava en continuo […]
Caracterización de una colisión de vehículo, del 8 de Enero de 2020, de GEOTAB Inc: En el presente documento se describen ejemplos de un sistema que procesa información que describe el movimiento de un vehículo en un momento relacionado con una posible […]