SISTEMA Y MÉTODO DE CARTOGRAFÍA DIGITAL DE VEGETACIÓN.
Sistema y método de cartografía digital de vegetación.
Se describe un sistema y un método de cartografía digital de vegetación sobre terrenos cultivados,
que permite la detección y el registro de su localización dentro de la parcela. Los mapas obtenidos tienen utilidad desde un punto de vista de actuación, en el caso que se pretenda eliminar la vegetación arvense de forma localizada, o desde el punto de vista científico, en el caso de estudiar la dinámica espacio-temporal de poblaciones vegetales.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200930392.
Solicitante: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC).
Nacionalidad solicitante: España.
Inventor/es: ANAYA VELAYOS,JOSE JAVIER, RIBEIRO SEIJAS,ANGELA, ANDÚJAR SÁNCHEZ,DIONISIO, DORADO GÓMEZ,JOSÉ, FERNÁNDEZ-QUINTANILLA GALLASTEGUI,CÉSAR, BURGOS ARTIZZU,Xavier Paolo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/32 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Estructuración o formato de datos de mapas.
- G06F17/30
- G09B29/10 G […] › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › G09B 29/00 Mapas (mapas celestes G09B 27/04 ); Planos; Gráficos; Trayectorias, p. ej. trazado de carreteras. › Spots para la lectura de mapas e indicaciones de posición por coordenadas; Ayudas para la lectura de mapas.
- H04N1/387 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 1/00 Exploración, transmisión o reproducción de documentos o similares, p. ej. transmisión facsímil; Sus detalles. › Composición, reposicion u otra modificacion de las originales.
Fragmento de la descripción:
Sistema y método de cartografía digital de vegetación.
Objeto de la invención
La presente invención se refiere a un sistema de detección de vegetación y realización de cartografía digital de vegetación arvense presente en cultivos.
El objeto de la invención consiste en poder determinar las zonas donde se acumulan o se agrupan plantas arvenses dentro un área concreta.
Antecedentes de la invención
En la agricultura actual, la práctica habitual para controlar la vegetación arvense consiste en realizar un tratamiento herbicida distribuido homogéneamente sobre todo el área de cultivo. No obstante, cada vez está más extendida la aplicación de herbicidas en base a umbrales de densidad de la vegetación arvense. Si consideramos que, de forma frecuente, las plantas arvenses se distribuyen en rodales dentro de los campos cultivados, parece lógico dirigir los tratamientos de forma selectiva hacia las zonas infestadas, dejando sin tratar aquellas otras que se encuentren limpias. Un paso adicional consistiría en integrar ambas ideas, es decir, aplicar herbicida solo en aquellas zonas con presencia de vegetación arvense, una vez se sobrepase un umbral determinado. De esta manera se pueden lograr dos de los objetivos pretendidos en la agricultura moderna: disminución de los costes de producción y reducción del impacto ambiental.
El requisito fundamental para poder aplicar de forma localizada los herbicidas es disponer de información sobre la distribución de la vegetación arvense en el campo. Los métodos tradicionales de cartografía vegetal son muy laboriosos, consumen gran cantidad de recursos humanos y tiempo, además de los costes asociados a ello, lo que limita en gran parte su utilidad práctica. La alternativa consiste en el uso de sistemas para la detección automática de plantas arvenses, que permitan reducir los inconvenientes de los métodos tradicionales, además de proporcionar una mayor precisión de la distribución espacial de estas plantas al mejorar la resolución (mayor número de datos registrados por unidad de superficie).
Descripción de la invención
El objeto de la invención es el desarrollo de un sistema y un método de obtención de mapas de vegetación (por ejemplo, vegetación arvense), de forma automática. Los componentes fundamentales que integran el sistema automático de cartografía digital de vegetación son: vehículo automotriz, sistema de detección (sensores optoelectrónicos), sistema de posicionamiento global con corrección diferencial (DGPS), tarjeta de adquisición de datos y una unidad de procesamiento (Tablet PC) a la cual se conecta la tarjeta y el DGPS.
El sensor optoelectrónico utilizado para detectar vegetación se basa en el reconocimiento del color verde de forma diferencial respecto al suelo desnudo. En el espectro electromagnético, cada objeto tiene su propia firma espectral cuando es expuesto a la luz. Por ejemplo, el suelo tiene una reflectancia distinta a la vegetación, debido fundamentalmente al rango de luz infrarroja. La clorofila de una planta en crecimiento absorbe la luz visible (especialmente en el rango del rojo) para usarla en la fotosíntesis, mientras que longitudes de onda correspondientes al infrarrojo cercano (IRC) son reflejadas en su mayor parte. Por tanto, índices de reflexión que utilicen la relación entre longitudes de onda del IRC y del rojo serán muy apropiados para identificar superficies ocupadas por vegetación. En este principio se basa el funcionamiento del sensor optoelectrónico, el cual emite alternativamente pulsos de luz en estas dos bandas del espectro electromagnético y, mediante un detector, es capaz de calcular cuanta luz es reflejada por la vegetación o el suelo en cada una de estas bandas. El procesamiento de esta información se realiza con un software incorporado en el sensor, que calcula la relación rojo/IRC utilizando índices NDVI (Normalized Difference Vegetation Index).
El sensor optoelectrónico es una unidad que cuenta con un emisor de luz y un detector óptico. La fuente de emisión de luz incluye dos longitudes de onda diferentes (rojo e IRC). El detector de luz mide la reflectancia del terreno sobre el cual trabaja. En presencia de vegetación verde (e.g., vegetación arvense), el detector reconoce una reflectancia distinta a la del suelo desnudo y envía una señal eléctrica (5 V). Cuando el sensor pasa de nuevo sobre suelo desnudo, la luz transmitida cambia y a su vez la señal eléctrica (0 V). Estas señales se pueden recoger con una electrónica adecuada y ser tratadas desde una unidad de procesamiento. Por tanto, para el desarrollo de este sistema, utilizamos una unidad de detección, formada por una matriz de diodos LED (rojo e IRC) y un fotodectector dotado de filtros para las longitudes de onda necesarias. La señal eléctrica (0 V ó 5 V) enviada por la unidad de detección se recoge acoplando un conector eléctrico.
El sistema objeto de la invención queda configurado sobre le vehículo de manera que éste último incorpora un bastidor fabricado para ser acoplado a la parte delantera del vehículo y que dará soporte a los sensores optoelectrónicos, donde uno de ellos (el central) será el portador de la antena del DGPS. Asimismo en la parte trasera del vehículo, en la cabina, se dispone una bandeja que da soporte a la unidad de procesamiento, a la tarjeta de adquisición de datos y al sistema de posicionamiento global con corrección diferencial (DGPS). Ambas partes del sistema ubicadas en las partes delantera y trasera del vehículo se encuentran conectadas mediante un cableado.
Descripción de los dibujos
Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferente de realización práctica de la misma, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
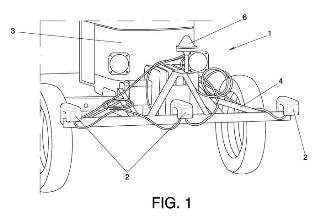
Figura 1.- Muestra imagen del sistema de detección con detalle de los tres sensores optoelectrónicos y la antena del receptor DGPS situados en el bastidor colocado en la parte frontal del vehículo.
Figura 2.- Muestra una imagen de la bandeja con la caja de control de los sensores optoelectrónicos, el receptor DGPS, la tarjeta de adquisición de datos y la unidad de procesamiento.
Realización preferente de la invención
A la vista de las figuras se describe a continuación un modo de realización preferente del sistema (1) objeto de esta invención sobre unas parcelas de cultivos.
La cartografía digital se realizó en 3 parcelas de maíz cultivadas de forma convencional de 2,5, 3,0 y 1,7 ha de superficie, respectivamente, situadas en la finca experimental "La Poveda" en Arganda del Rey (Madrid). La siembra de maíz se realizó el 4 de abril de 2008, con una distancia entre líneas de cultivo de 75 cm. Las mediciones fueron realizadas el 16 de mayo de 2008, con el cultivo en estado de 4-6 hojas, lo que deja un espacio entre líneas libre de cultivo superior a 50 cm, en el cual se centra el área de detección de unos sensores optoelectrónicos (2).
Con anterioridad a la cartografía digital de las parcelas, se realizó un estudio con el fin de decidir el nivel de sensibilidad óptimo de detección. Los resultados de este estudio permitieron establecer como nivel adecuado de sensibilidad la posición 6, que viene a coincidir con un valor de superficie cubierta por la vegetación respecto al suelo desnudo próximo al 15%. Por tanto, en las zonas con una cobertura vegetal superior a este umbral, se genera un impulso eléctrico cercano a 5 V. Finalmente, los datos obtenidos en la cartografía digital con los sensores optoelectrónicos (2) fueron validados con datos reales obtenidos de 342 puntos distribuidos al azar en la parcela y georeferenciados, mediante la valoración de imágenes digitales. De este modo se pudieron comparar las medidas dadas por los sensores optoelectrónicos (2) con las medidas calculadas a partir de las imágenes digitales en cada punto.
Se empleó un total de tres sensores optoelectrónicos (2) tipo Weedseeker, situándolos en línea perpendicular al sentido de la marcha en la parte delantera de un vehículo automotriz (3) (tractor John Deere 1140) de tamaño adecuado para desplazarse entre las líneas de un campo de maíz sin causar daños al cultivo. La colocación y posicionamiento de los tres sensores optoelectrónicos (2) se realizó sobre un bastidor (4) construido a tal efecto tal y como...
Reivindicaciones:
1. Sistema (1) para la cartografía digital de vegetación que comprende un vehículo (3) motriz caracterizado porque comprende:
- un bastidor (4) en la parte delantera del vehículo sobre el que se montan unos sensores optoelectrónicos (2) y una antena (6) de un receptor de geoposicionamiento diferencial DGPS (5) que se encuentra sobre el sensor optoelectrónico (2) central, y
- una bandeja (7) montada en la parte posterior de del vehículo (3) que soporta una caja de control (8) de los sensores optoelectrónicos (2), el receptor de geoposicionamiento diferencial DGPS (5) conectado a una unidad de procesamiento (10) y una tarjeta de adquisición de datos (9) que permite transmitir señales de los sensores optoelectrónicos (2) a la unidad de procesamiento (10) encargada de supervisar la tarea de muestreo, suministrando todos los elementos de visualización del estado del sistema (1), además de almacenar unas señales georeferenciadas suministradas por los sensores optoelectrónicos (2).
2. Sistema (1) según reivindicación 1 donde los sensores optoelectrónicos (2) comprenden:
- un emisor de luz destinado a producir un haz de luz incidente sobre un terreno a cartogra- fiar,
- un detector óptico destinado a realizar una detección de vegetación presente en el terreno, y
- una salida de la señal eléctrica dual, en función de la presencia de vegetación en el terreno a cartografiar.
3. Sistema (1) según reivindicación 1 donde la unidad de procesamiento (10) se elige entre los siguientes: un Tablet PC, una PDA ó un ordenador portátil.
4. Sistema (1) según reivindicación 1 donde el receptor de geoposicionamiento diferencial (DGPS) (5) dispone de corrección diferencial.
5. Método de cartografía digital de vegetación que hace uso del sistema (1) descrito en cualquiera de las reivindicaciones anteriores caracterizado porque comprende las siguientes fases:
- montar el bastidor (4) con los sensores optoelectrónicos (2) y la antena (6) del receptor DGPS (5) en la parte delantera del vehículo (3),
- montar la bandeja (7) en la parte posterior del vehículo (3) y colocar sobre ella la caja de control (8) de los sensores optoelectrónicos (2), el receptor de geoposicionamiento diferencial DGPS (5), la tarjeta de adquisición de datos (9) y la unidad de procesamiento (10),
- conectar los sensores optoelectrónicos (2) a la tarjeta de adquisición de datos (9),
- calibrar los sensores optoelectrónicos (2) mediante la caja de control (8) teniendo en cuenta la sensibilidad de cada sensor optoelectrónico (2) en función de un valor de cobertura vegetal estimado como umbral de disminución de rendimiento de cultivo.
- determinar la separación entre los sensores optoelectrónicos (2) en función del terreno a cartografiar y de la distancia entre líneas de cultivo.
- implementar en la unidad de procesamiento (10) un programa de adquisición de datos, de visualización del estado del sistema (1) para la supervisión de la tarea de muestreo y del almacenamiento de señales georeferenciadas reobtenidas mediante los sensores optoelectrónicos (2),
- realizar un recorrido con el vehículo (3) sobre el terreno a cartografiar con los sensores optoelectrónicos (2)a una altura de 60 cm del terreno.
- procesar en la unidad de procesamiento (10) las señales georeferenciadas, obtenidas y almacenadas anteriormente, mediante un programa GIS para calcular las posiciones de los sensores optoelectrónicos (2) laterales en función de la posición recogida para el sensor optoelectrónico (2) central que lleva acoplada la antena (6) DGPS, y
- procesar en la unidad de procesamiento (10) los datos obtenidos en el paso anterior mediante el programa GIS para representar mapas de vegetación.
Patentes similares o relacionadas:
Composiciones y métodos para modelar el metabolismo de Saccharomyces cerevisiae, del 3 de Junio de 2020, de THE REGENTS OF THE UNIVERSITY OF CALIFORNIA: Un metodo implementado por computadora para proporcionar a un usuario una simulacion de una funcion fisiologica de levadura relacionada con un gen heterologo […]
Procedimiento de visualización de páginas por medio de un navegador de un equipo como una caja descodificadora Proveedor de Servicios de Internet, del 10 de Enero de 2020, de FREEBOX (100.0%): Un procedimiento de visualización de páginas por un equipo cliente equipado de un sistema cerrado, conectado a un servidor remoto , integrando […]
Procedimiento implementado por ordenador y controlado por ordenador, producto de programa informático y plataforma para disponer datos para su procesamiento y almacenamiento en un motor de almacenamiento de datos, del 4 de Noviembre de 2019, de Dynactionize N.V: Un procedimiento implementado por ordenador y controlado por ordenador de disposición de datos para procesamiento y almacenamiento de los mismos en un […]
MÉTODO DE DOBLAJE Y LOCUCIONES DE AUDIO, del 11 de Julio de 2019, de TANGO VOZ, S.L: Se describe en este documento un método que permite gestionar la producción de doblajes y locuciones de audio destinados a medios audiovisuales de tal manera que no se […]
Un sistema de control para controlar el funcionamiento de una unidad de procesamiento de datos, del 21 de Mayo de 2019, de IG Knowhow Limited: Un sistema de control para controlar el funcionamiento de una unidad de procesamiento de datos, la unidad de procesamiento de datos recibiendo una primera […]
Dispositivo de procesamiento de información, método de procesamiento de información, programa de procesamiento de información y soporte de registro, del 1 de Mayo de 2019, de RAKUTEN, INC: Dispositivo de procesamiento de información que comprende: un medio (12b) de memoria de palabra de área local que almacena una palabra de área […]
Método para proporcionar una estructura de índice en una base de datos, del 1 de Mayo de 2019, de Capish International AB: Metodo para proporcionar una estructura de indice en una base de datos que comprende una pluralidad de tipos de objetos, donde cada tipo de objetos […]
SISTEMA PARA LA DETECCIÓN REMOTA DEL USO DEL CINTURÓN DE SEGURIDAD EN UN VEHÍCULO, del 18 de Abril de 2019, de CASANOVA RENT VOLKS, S.A. DE C.V: La presente invención se refiere a la industria automotriz, particularmente está relacionada con los cinturones de seguridad con que están equipados los vehículos, […]