Sistema para estabilizar al menos tres vertebras.
Sistema para estabilizar al menos tres vértebras, caracterizado porque comprende:
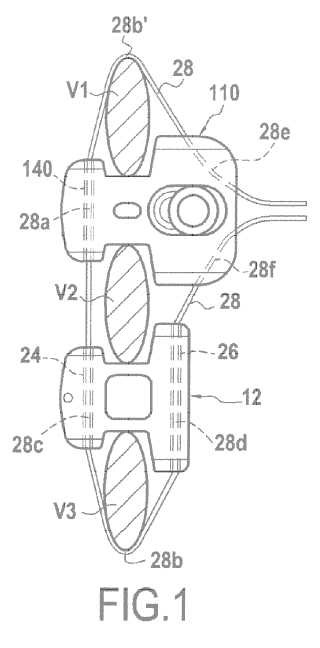
- un único elemento (28) de unión flexible que tiene dos partes (28e, 28f) de extremo libre y partes (28a, 28c, 28d) intermedias entre las mismas, estando adaptado dicho elemento de unión para formar un único lazo alrededor de las apófisis espinosas de dichas vértebras (V1, V2, V3); y
- un grupo de al menos dos espaciadores (12, 110), estando adaptado cada espaciador para interponerse entre las apófisis espinosas de dos vértebras adyacentes, comprendiendo al menos dicho grupo de espaciadores (12, 110) :
- un primer espaciador (12) que tiene medios de guiado para guiar dos partes (28c, 28d) intermedias del elemento de unión; y
- un segundo espaciador (110) con un sistema de sujeción de elemento de unión a través del que pueden insertarse las dos partes (28e, 28f) de extremo libre del elemento de unión y tirarse de las mismas, permitiendo el sistema de sujeción de elemento de unión que dichas partes (28e, 28f) de extremo libre se sujeten de manera fija al segundo espaciador (110) .
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/056168.
Solicitante: ZIMMER SPINE.
Nacionalidad solicitante: Francia.
Dirección: 23, PARVIS DES CHARTRONS LA CITÉ MONDIALE 33000 BORDEAUX FRANCIA.
Inventor/es: BELLIARD,Karl P.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/70 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Dispositivos para mantener en posición o estabilizar la columna vertebral.
PDF original: ES-2378142_T3.pdf
Fragmento de la descripción:
Sistema para estabilizar al menos tres vértebras.
Sector de la técnica
La presente descripción se refiere a un sistema para estabilizar al menos tres vértebras, es decir, a un sistema que mantiene juntas al menos tres vértebras. Más particularmente, se refiere a un sistema que, aunque mantiene juntas las vértebras, permite una cantidad limitada de movimiento relativo entre las mismas, proporcionando así lo que se denomina una "estabilización dinámica".
Estado de la técnica
Cuando se desea estabilizar sólo dos vértebras, se conoce colocar entre las mismas un implante intervertebral constituido por un espaciador que habitualmente se dispone entre las dos apófisis espinosas de las vértebras, junto con un elemento de unión o cordón que rodea las apófisis espinosas para mantener el espaciador entre las vértebras.
Por ejemplo, se conoce usar un elemento de unión que presenta dos partes de extremo libre que se sujetan al espaciador con la ayuda de un sistema de autobloqueo del tipo descrito en la solicitud de patente PCT WO 2005/120277.
Por la solicitud de patente estadounidense US 2006/0235387 también se conoce usar un espaciador y dos elementos de unión, insertándose cada elemento de unión a través de un conducto central realizado en el espaciador y pasando alrededor de la apófisis transversa de una de las dos vértebras, uniéndose las dos partes de extremo libre del elemento de unión por medio de un tope.
El documento US2008033557 A1 da a conocer otro sistema de estabilización vertebral.
Sin embargo, con determinadas patologías de la columna vertebral, puede ser que el cirujano necesite realizar una cirugía para estabilizar más de dos vértebras, es decir, sujetar al menos tres vértebras entre sí (por ejemplo tres o cuatro vértebras) .
Objeto de la invención Un primer objetivo de la presente descripción es proporcionar un sistema de estabilización para estabilizar al menos tres vértebras.
Otro objetivo de la presente descripción es proporcionar un sistema de estabilización que permita al cirujano ejercer la cantidad de tracción requerida sobre las partes de extremo libre del sistema de unión en condiciones mejoradas, e independientemente del número de vértebras que deben estabilizarse.
Para lograr estos objetivos, según un aspecto de la presente descripción, se proporciona un sistema de estabilización para estabilizar al menos tres vértebras, que comprende:
- un único elemento de unión flexible que tiene dos partes de extremo libre y partes intermedias entre las mismas, estando adaptado dicho elemento de unión para formar un único lazo alrededor de las apófisis espinosas de dichas (al menos tres) vértebras; y
- un grupo de al menos dos espaciadores, estando adaptado cada espaciador para interponerse entre las apófisis espinosas de dos vértebras adyacentes, comprendiendo al menos dicho grupo de espaciadores:
- un primer espaciador que tiene medios de guiado para guiar dos partes intermedias del elemento de unión; y
- un segundo espaciador con un sistema de sujeción de elemento de unión a través del que pueden insertarse las dos partes de extremo libre del elemento de unión y tirarse de las mismas, permitiendo el sistema de sujeción de elemento de unión que dichas partes de extremo libre se sujeten de manera fija al segundo espaciador.
Un sistema de estabilización de este tipo, aunque tiene un número de partes muy limitado y una construcción sencilla, puede utilizarse para mantener juntas tres o más vértebras.
Como dicho elemento de unión forma un único lazo alrededor de las apófisis espinosas de las tres o más vértebras que deben estabilizarse, y como sólo hay dos partes de extremo libre adecuadas para ejercer una tracción, el cirujano puede ejercer fácilmente dicha tracción.
Gracias a dichos medios de guiado y a dicho sistema de sujeción, cada parte del sistema de estabilización coopera conjuntamente con otra parte del sistema, permitiendo así al cirujano colocar estas partes de manera sencilla y correcta unas con respecto a otras.
El sistema de sujeción de elemento de unión, que se sujeta al segundo espaciador, puede formar una parte solidaria del espaciador o puede montarse en el mismo de manera separable.
En una realización, el primer espaciador no tiene ningún sistema de sujeción de elemento de unión.
En una realización, además de su sistema de sujeción de elemento de unión, el segundo espaciador tiene medios de guiado para guiar una parte intermedia del elemento de unión.
En otra realización, el primer espaciador tiene un sistema de sujeción de elemento de unión. Pero, en tal caso, el sistema de sujeción de elemento de unión del primer espaciador no se usa para sujetar las dos partes de extremo libre del elemento de unión, sino para guiar una parte intermedia del elemento de unión. Por tanto, en este caso, el sistema de sujeción de elemento de unión del primer espaciador forma medios de guiado para guiar una primera parte intermedia del elemento de unión, y el primer espaciador comprende además otros medios de guiado para guiar una segunda parte intermedia del elemento de unión.
En otra realización, el primer espaciador y el segundo espaciador son similares, comprendiendo ambos un sistema de sujeción de elemento de unión y medios de guiado para guiar una parte intermedia del elemento de unión. En tal caso, el sistema de sujeción de elemento de unión del primer espaciador debe considerarse, desde un punto de vista funcional, como medio de guiado para guiar una parte intermedia del elemento de unión, tal como se explicó anteriormente.
Según otro aspecto de la presente descripción, se proporciona un sistema para estabilizar al menos tres vértebras, que comprende:
- al menos dos elementos de unión flexibles adaptados para formar juntos un único lazo alrededor de las apófisis espinosas de dichas (al menos tres) vértebras, teniendo cada elemento de unión dos partes de extremo libre y partes intermedias entre las mismas; y
- al menos dos espaciadores, estando adaptado cada espaciador para interponerse entre las apófisis espinosas de dos vértebras adyacentes, y comprendiendo cada espaciador:
- medios de guiado para guiar una parte intermedia de uno de dichos elementos de unión; y
- un sistema de sujeción de elemento de unión a través del que puede insertarse una parte de extremo libre de cada uno de dichos dos elementos de unión y tirarse de la misma, permitiendo el sistema de sujeción de elemento de unión que estas dos partes de extremo libre se sujeten de manera fija al espaciador.
Un sistema de estabilización de este tipo, aunque tiene un número de partes muy limitado y una construcción sencilla, puede utilizarse para mantener juntas tres o más vértebras.
Como dichos dos elementos de unión forman juntos un único lazo alrededor de las apófisis espinosas de las tres o más vértebras que deben estabilizarse, incluso si, físicamente, hay dos pares de partes de extremo libre, desde un punto de vista funcional, sólo hay dos partes de extremo libre adecuadas para ejercer una tracción y el cirujano puede ejercer fácilmente dicha tracción. El cirujano puede incluso seleccionar el par de partes de extremo libre de más fácil acceso.
Gracias a dichos medios de guiado y a dicho sistema de sujeción, cada parte del sistema de estabilización actúa conjuntamente con otra parte del sistema, permitiendo así al cirujano colocar estas partes de manera sencilla y correcta unas con respecto a otras.
El sistema de sujeción de elemento de unión, que se sujeta a cada espaciador, puede formar una parte solidaria del espaciador o puede montarse en el mismo de manera separable.
En todas las realizaciones definidas anteriormente, independientemente del número de elementos de unión o cordones usados, cada elemento de unión puede realizarse de un material que presente una determinada cantidad de elasticidad, de modo que incluso después de que el cirujano haya bloqueado y tirado de las partes de extremo libre del/de los elemento/s de unión, cada elemento de unión permite una cantidad limitada de movimiento relativo a las tres o más vértebras mientras proporciona un efecto estabilizador, proporcionando así una estabilización dinámica.
Las características y ventajas mencionadas anteriormente en la presente descripción, así como otras, se describen a continuación en detalle. La... [Seguir leyendo]
Reivindicaciones:
1. Sistema para estabilizar al menos tres vértebras, caracterizado porque comprende:
- un único elemento (28) de unión flexible que tiene dos partes (28e, 28f) de extremo libre y partes (28a, 28c, 28d) intermedias entre las mismas, estando adaptado dicho elemento de unión para formar un único lazo alrededor de las apófisis espinosas de dichas vértebras (V1, V2, V3) ; y
- un grupo de al menos dos espaciadores (12, 110) , estando adaptado cada espaciador para interponerse entre las apófisis espinosas de dos vértebras adyacentes, comprendiendo al menos dicho grupo de espaciadores (12, 110) :
- un primer espaciador (12) que tiene medios de guiado para guiar dos partes (28c, 28d) intermedias del elemento de unión; y
- un segundo espaciador (110) con un sistema de sujeción de elemento de unión a través del que pueden insertarse las dos partes (28e, 28f) de extremo libre del elemento de unión y tirarse de las mismas, permitiendo el sistema de sujeción de elemento de unión que dichas partes (28e, 28f) de extremo libre se sujeten de manera fija al segundo espaciador (110) .
2. Sistema para estabilizar al menos tres vértebras, según la reivindicación 1, caracterizado porque los medios de guiado comprenden dos conductos (24, 26) internos que se extienden a través del grosor del primer espaciador (110) y ubicados a ambos lados del plano medio del primer espaciador (110) , pasando las dos partes (28c, 28d) intermedias, respectivamente, de manera libre a través de los dos conductos (24, 26) internos.
3. Sistema para estabilizar al menos tres vértebras, según la reivindicación 1 ó 2, caracterizado porque el primer espaciador (12) es un espaciador sencillo que no tiene ningún sistema de sujeción de elemento de unión.
4. Sistema para estabilizar al menos tres vértebras, según la reivindicación 1, caracterizado porque tanto el primer como el segundo espaciador (110, 115) comprenden un sistema de sujeción de elemento de unión.
5. Sistema para estabilizar al menos tres vértebras, según la reivindicación 4, caracterizado porque los espaciadores (110, 115) primero y segundo son idénticos.
6. Sistema para estabilizar al menos tres vértebras, según una cualquiera de las reivindicaciones 1 a 5, caracterizado porque el segundo espaciador (110) tiene medios de guiado para guiar una parte (28a) intermedia del elemento de unión.
7. Sistema para estabilizar al menos tres vértebras, según la reivindicación 6, caracterizado porque dichos medios de guiado del segundo espaciador (110) comprenden un conducto (140) interno que se extiende a través del grosor del segundo espaciador y estando ubicado en el lado opuesto del sistema de sujeción de elemento de unión, pasando dicha parte (28a) intermedia de manera libre a través de dicho conducto (140) interno.
8. Sistema para estabilizar al menos tres vértebras, según una cualquiera de las reivindicaciones 1 a 7, caracterizado porque dicho sistema de sujeción de elemento de unión comprende:
- dos partes (120, 122) que pueden moverse una con respecto a otra, definiendo dichas partes (120, 122) superficies (130a, 130b, 132a, 132b) de fijación entre las que es posible colocar dichas partes (28e, 28f) de extremo libre del elemento de unión, y
- un elemento (138) mecánico para hacer que dichas dos partes (120, 122) se muevan una hacia la otra, con lo que las partes (28e, 28f) de extremo libre del elemento de unión se fijan entre dichas superficies (130a, 130b, 132a, 132b) de fijación y, por tanto, se sujetan al segundo espaciador (110) .
9. Sistema para estabilizar al menos tres vértebras, caracterizado porque comprende:
- al menos dos elementos (27, 29) de unión flexibles adaptados para formar juntos un único lazo alrededor de las apófisis espinosas de dichas vértebras (V1, V2, V3) , teniendo cada elemento (27, 29) de unión dos partes (27e, 27f, 29e, 29f) de extremo libre y partes (27a, 29a) intermedias entre las mismas; y
- al menos dos espaciadores (300, 302) , estando adaptado cada espaciador para interponerse entre las apófisis espinosas de dos vértebras adyacentes, y comprendiendo cada espaciador (300, 302) :
- medios de guiado para guiar una parte (27a, 29a) intermedia de uno de dichos elementos (27, 29) de unión; y
- un sistema (304, 306) de sujeción de elemento de unión a través del que puede insertarse una parte (27e, 29e, 27f, 29f) de extremo libre de cada uno de dichos dos elementos (27, 29) de unión y tirarse de la misma, permitiendo el sistema de sujeción de elemento de unión que estas dos partes (27e, 29e, 27f, 29f) de extremo libre se sujeten de manera fija al espaciador (300, 302) .
10. Sistema para estabilizar al menos tres vértebras, según la reivindicación 9, caracterizado porque dichos medios de guiado comprenden un conducto interno que se extiende a través del grosor del espaciador y estando ubicado en el lado opuesto del sistema (304, 306) de sujeción de elemento de unión, pasando dicha parte (27a, 29a) intermedia de manera libre a través de dicho conducto interno.
11. Sistema para estabilizar al menos tres vértebras, según la reivindicación 9 ó 10, caracterizado porque dicho 10 sistema (304, 306) de sujeción de elemento de unión comprende:
- dos partes que pueden moverse una con respecto a otra, definiendo dichas partes superficies de fijación entre las que es posible colocar dichas partes (27e, 29e, 27f, 29f) de extremo libre de los elementos de unión (27, 29) , y
- un elemento mecánico para hacer que las dos partes se muevan una hacia la otra, con lo que las partes
de extremo libre de los elementos de unión se fijan entre dichas superficies de fijación y, por tanto, se sujetan al espaciador.
Patentes similares o relacionadas:
Kit de implante ortopédico, del 3 de Junio de 2020, de Neo Medical SA: Un kit de implante que comprende: un extensor de tornillo que incluye, un cuerpo cilíndrico hueco que incluye dos ranuras longitudinales opuestas […]
Procedimiento de fabricación de un implante, principalmente vertebral o intervertebral, e implante obtenido por este procedimiento, del 27 de Mayo de 2020, de MEDICREA INTERNATIONAL: Procedimiento de fabricación de un implante , principalmente vertebral o intervertebral, comprendiendo este implante (1, 21, […]
Instrumental mínimamente invasivo para la entrega de un espaciador interespinoso, del 6 de Mayo de 2020, de VERTIFLEX, INC: Un instrumento de inserción para un espaciador interespinoso, que comprende: un cuerpo cilíndrico alargado que tiene un extremo proximal […]
Fijador médico, del 15 de Abril de 2020, de RTG Scientific LLC: Un fijador médico, que comprende: un árbol alargado que tiene un extremo proximal y un extremo distal, estando una primera rosca […]
Sujetador, del 1 de Abril de 2020, de CURTIN UNIVERSITY OF TECHNOLOGY: Un sujetador adecuado para aplicaciones ortopédicas y dispuesto para la sujeción cuando se coloca en un agujero perforado en un hueso, el sujetador […]
Instrumentos médicos, del 4 de Marzo de 2020, de AESCULAP AG: Instrumental médico, que comprende un sistema integrado de navegación médico manual , que presenta una unidad de detección óptica con una cámara […]
Sistema de implantes y elemento de fijación para un sistema de implantes, del 4 de Marzo de 2020, de AESCULAP AG: Elemento de sujeción para un sistema de implantes que comprende al menos dos elementos de sujeción que pueden ser fijados a las […]
Sistema de tornillo pedicular y sistema de estabilización de la columna vertebral, del 26 de Febrero de 2020, de AESCULAP AG: Sistema de tornillo pedicular que comprende un tornillo pedicular con una caña de tornillo , que tiene una rosca externa y una cabeza […]