Sistema de dirección activo para vehículos automotores.
Sistema de dirección activo para vehículos automóviles, comprendiendo
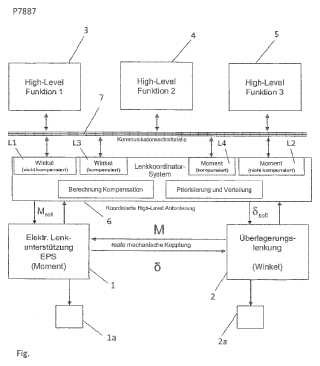
- una servodirección eléctrica (1) y una dirección superpuesta (2) con actuadores (1a,
2a) correspondientes,
- múltiples sistemas individuales (3, 4, 5) influyentes sobre el comportamiento de marcha, que generanrequerimientos de dirección, y
- un sistema coordinador de dirección (6) para la generación de señales de control para los actuadores (1a, 2a) de laservodirección (1) y de la dirección superpuesta (2) que genera dichas señales de control en base a losrequerimientos de dirección existentes, caracterizado porque, ante un requerimiento de dirección para el ajuste deun ángulo de superposición (δsoll) especificado por un sistema individual (3, 4, 5), el sistema coordinador de dirección(6) pone a disposición una señal de control correspondiente para el actuador (2a) de la dirección superpuesta (2)para la generación de un ángulo de dirección (δsoll) a superponer al ángulo de dirección actual, con lo cual se generaal mismo tiempo una señal de control para el actuador (1a) de la servodirección (1) para el apoyo de par completo oparcial del actuador (2a) de la dirección superpuesta (9).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10013839.
Solicitante: AUDI AG.
Nacionalidad solicitante: Alemania.
Dirección: 85045 INGOLSTADT ALEMANIA.
Inventor/es: ULLMANN, STEFAN, Stemmer,Martin.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B).
- B62D5/04 B62D […] › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
- B62D6/00 B62D […] › Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00).
PDF original: ES-2387740_T3.pdf
Fragmento de la descripción:
Sistema de dirección activo para vehículos automotores.
La invención se refiere a un sistema de dirección activo para vehículos automotores según el preámbulo de la reivindicación 1.
Un sistema de dirección activo de clase genérica se conoce por el documento US 2006/041360 A1 que como unidad de control de vehículo de orden superior está realizado con un algoritmo de orden superior como estrategia de control, con el que se realiza el control total del vehículo y se decide la utilización de subsistemas. Dicha unidad de control de vehículo de orden superior comprende, además, subalgoritmos para sistemas de marcha, como los sistemas ABS (sistema antibloqueo) y TSC (sistema de control de tracción) , y también algoritmos para una servodirección eléctrica (EPS) y un sistema de control de ángulo de derrape (AYC = active yaw control) para el control de una dirección superpuesta. En función de la situación de marcha actual se controlan los sistemas vehiculares por medio del algoritmo de orden superior usando diferentes estrategias de control, de modo que se excluyan conflictos de mando entre los sistemas vehiculares o se realicen, por ejemplo, priorizaciones respecto de las señales de control de dichos sistemas vehiculares.
Además, por el documento DE 100 32 340 A1 se conoce un sistema de dirección con sistemas de asistencia al conductor, como la regulación de la dinámica de marcha (ESP) y la regulación del alineamiento (asistente de estabilización direccional) como sistemas individuales, que generan señales de control para un servomotor de una servodirección asignado a la cremallera y/o un mecanismo de superposición de una dirección superpuesta dispuesto en la columna de dirección. En este sistema de dirección se realiza la intervención de la regulación de dinámica de marcha mediante el control del servomotor, siendo el engranaje de superposición controlado al mismo tiempo de tal manera que se compensa el par de la mano en el volante provocado por la intervención de la dinámica de marcha, motivo por el cual la sensación de manejo puede ser influenciada independientemente de la asistencia al par. En el caso de un alineamiento automático se genera un par de dirección adicional correspondiente que, sin embargo, no es compensado por medio de una dirección superpuesta, de modo que por este motivo el conductor siente la intervención debida al par aplicado, adicionalmente, sobre el volante y puede decidir si quiere obedecer a la regulación de alineamiento.
Sin embargo, en este sistema de dirección conocido según el documento DE 100 32 340 A1 la flexibilidad respecto de la realización de funciones de dirección posibles es restringida, gracias a que el servomotor es usado, exclusivamente, para el ajuste del ángulo de rueda y la dirección superpuesta es usada exclusivamente para la corrección del par.
Además, el documento DE 101 32 440 A1 describe un dispositivo de gestión para la gestión de la influencia sobre el comportamiento de marcha de un vehículo por medio de diferentes sistemas individuales como, por ejemplo, una regulación de dinámica de marcha (ESP) , una dirección superpuesta (EAC) y una estabilización de balanceo (EAR, ARS) . En este caso, los sistemas individuales controlan, directamente, los actores respectivos de un sistema de frenos, una dirección o un chasis, controlando el dispositivo de gestión la actividad de dichos sistemas individuales e influyendo sobre sus efectos en función de las situaciones. Para ello se ha dispuesto una conexión de comunicación entre el dispositivo de gestión y los equipos de control de los sistemas individuales. De este modo, los sistemas individuales pueden actuar de forma completamente independiente el uno del otro; es decir que, sin la intervención del dispositivo de gestión, los sistemas individuales son independientes el uno del otro y sólo cuando pudiera producirse una influencia recíproca no deseada de los sistemas individuales puede intervenir el dispositivo de gestión influyendo directamente sobre un sistema individual o varios de estos sistemas individuales mediante ordenes de control enviadas a sus equipos de control.
Sin embargo, este sistema según el documento DE 101 32 440 A1 presenta la desventaja de que el algoritmo del dispositivo de gestión debe ser incrustado en el algoritmo de los equipos de control respectivo a supervisar, ya que, de otro modo, dado el caso, no es posible prevenir una acción no deseada de un sistema individual, con lo cual un sistema de este tipo es, en su totalidad, de una alta complejidad.
Por lo tanto, el objetivo de la invención es indicar un sistema de dirección perfeccionado del tipo nombrado al comienzo, mediante el cual sea posible una coordinación de las actividades de los sistemas individuales y que presente una baja complejidad, sin que con ello puedan ocurrir influencias recíprocas no deseadas de los sistemas individuales.
Este objetivo se consigue por medio de un sistema de dirección activo con las características de la reivindicación 1 como también con las características de la reivindicación 2.
En un sistema de dirección activo de este tipo para vehículos automóviles, que comprende una servodirección eléctrica y una dirección superpuesta con actuadores correspondientes, una pluralidad de sistemas individuales influyentes sobre el comportamiento de marcha que generan requerimientos a la dirección y un sistema coordinador de dirección para la generación de señales de control para los actuadores de la servodirección y de la dirección superpuesta que genera dichas señales de control en base a los requerimientos de dirección existentes, según una primera solución se ha previsto que, ante un requerimiento de dirección para el ajuste de un ángulo de superposición especificado por un sistema individual, el sistema coordinador de dirección ponga a disposición una señal de control correspondiente para el actuador de la dirección superpuesta para la generación de un ángulo de dirección a superponer al ángulo de dirección actual, con lo cual se genera al mismo tiempo una señal de control para el actuador de la servodirección para el apoyo de par completo o parcial del actuador de la dirección superpuesta.
De este modo, el requerimiento de dirección para el ajuste de un ángulo de superposición especificado ya puede incluir que deba producirse una compensación del par en el volante por medio de un par generado, adicionalmente, por la servodirección, o el sistema coordinador de dirección mismo decidirá si ha de tener lugar una compensación. Esto puede ser decidido en función del sistema individual del cual proviene el requerimiento de dirección. De este modo, en caso de un requerimiento de dirección de un sistema ESP es sensato realizar una compensación completa, de modo que el conductor no advierta la intervención. Sin embargo, en el caso de que el requerimiento de dirección sea generado por un sistema de estabilización direccional, es mejor no realizar una compensación del par generado en el volante, o sólo realizarla en parte, para informar al conductor respecto de la intervención en la dirección. También es posible que un requerimiento de dirección sea generado por un sistema individual que, expresamente, excluya una compensación.
De acuerdo con la segunda solución se ha previsto que con un requerimiento de dirección para el ajuste de un par de superposición especificado por un sistema individual, por parte del sistema coordinador de dirección se ponga a disposición una señal de control correspondiente para el actuador de la servodirección para la generación de un par de dirección adicional a superponer al par de dirección actual, siendo generada al mismo tiempo, para la compensación total o parcial del par de dirección adicional, una señal de control para el actuador de la dirección superpuesta.
También en el caso de esta solución, el requerimiento de dirección puede incluir, al mismo tiempo, un requerimiento de compensación. De caso contrario, el sistema coordinador de dirección decide en base al sistema individual que ha generado dicho requerimiento. Del mismo modo, también es posible que un requerimiento de dirección sea generado por un sistema individual que excluya, expresamente, una compensación.
En las dos soluciones de acuerdo con la invención, la compensación, o sea la magnitud del par generado, es calculada mediante el sistema coordinador de dirección y, en consecuencia, no debe ser integrada de manera separada a cada sistema individual, o sea a cada sistema de asistencia.
Mediante... [Seguir leyendo]
Reivindicaciones:
1. Sistema de dirección activo para vehículos automóviles, comprendiendo
- una servodirección eléctrica (1) y una dirección superpuesta (2) con actuadores (1a, 2a) correspondientes,
- múltiples sistemas individuales (3, 4, 5) influyentes sobre el comportamiento de marcha, que generan requerimientos de dirección, y
- un sistema coordinador de dirección (6) para la generación de señales de control para los actuadores (1a, 2a) de la servodirección (1) y de la dirección superpuesta (2) que genera dichas señales de control en base a los requerimientos de dirección existentes, caracterizado porque, ante un requerimiento de dirección para el ajuste de un ángulo de superposición (0soll) especificado por un sistema individual (3, 4, 5) , el sistema coordinador de dirección
(6) pone a disposición una señal de control correspondiente para el actuador (2a) de la dirección superpuesta (2) para la generación de un ángulo de dirección (0soll) a superponer al ángulo de dirección actual, con lo cual se genera al mismo tiempo una señal de control para el actuador (1a) de la servodirección (1) para el apoyo de par completo o parcial del actuador (2a) de la dirección superpuesta (9) .
2. Sistema de dirección activo para vehículos automóviles, comprendiendo
- una servodirección eléctrica (1) y una dirección superpuesta (2) con actuadores (1a, 2a) correspondientes,
- múltiples sistemas individuales (3, 4, 5) influyentes sobre el comportamiento de marcha, que generan requerimientos de dirección, y
- un sistema coordinador de dirección (6) para la generación de señales de control para los actuadores (1a, 2a) de la servodirección (1) y de la dirección superpuesta (2) el cual genera dichas señales de control en base a los requerimientos de dirección existentes, caracterizado porque, ante un requerimiento de dirección para el ajuste de un par de superposición (Msoll) especificado por un sistema individual (3, 4, 5) , el sistema coordinador de dirección
(6) pone a disposición una señal de control correspondiente para el actuador (1a) de la servodirección (1) para la generación de un par de dirección (Msoll) adicional a sobreponer al par de dirección actual, con lo cual se genera al mismo tiempo una señal de control para el actuador (2a) de la dirección superpuesta (2) para la compensación completa o parcial del par de dirección adicional.
3. Sistema de dirección activo según la reivindicación 1 o 2, caracterizado porque ante la existencia simultánea de múltiples requerimientos de dirección se realiza por parte del sistema coordinador de dirección (6) una priorización de los requerimientos de dirección.
4. Sistema de dirección activo según una de las reivindicaciones precedentes, caracterizado porque ante la existencia de requerimientos de dirección simultáneos con ángulos de superposición especificados por varios sistemas individuales (3, 4, 5) , los mismos son compensados por el sistema coordinador de dirección (6) para obtener un ángulo de superposición, y se genera una señal de control para el actuador (2a) de la dirección superpuesta (2) para el ajuste de un único ángulo de superposición.
5. Sistema de dirección activo según una de las reivindicaciones precedentes, caracterizado porque ante la existencia de requerimientos de dirección simultáneos con pares de superposición especificados por varios sistemas individuales (3, 4, 5) , los mismos son compensados por el sistema coordinador de dirección (6) para obtener un par de superposición, y se genera una señal de control para el actuador (1a) de la servodirección (2) para el ajuste de un único par de superposición.
6. Sistema de dirección activo según una de las reivindicaciones precedentes, caracterizado porque el sistema coordinador de dirección (6) está realizado en un equipo de control que comunica con los sistemas individuales (3, 4, 5) por medio de una interfaz.
7. Sistema de dirección activo según una de las reivindicaciones precedentes, caracterizado porque el sistema coordinador de dirección (6) está integrado a la servodirección (1) o en la dirección superpuesta (2) .
Patentes similares o relacionadas:
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]
Accionamiento de husillo, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Husillo roscado con una parte de accionamiento , que presenta un eje longitudinal (A) y está alojada a través de un primer cojinete , […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
Dispositivo para generar una fuerza auxiliar en un sistema de dirección de un automóvil, del 23 de Octubre de 2019, de THYSSENKRUPP PRESTA AG: Dispositivo para aplicar una fuerza auxiliar en un sistema de dirección de automóvil, que comprende un tornillo helicoidal de accionamiento conectable […]