Sistema de control de articulación.
Sistema de control de articulación para ser utilizado con un vehículo articulado (10) que presenta una carroceríade vehículo delantera (11) y una carrocería de vehículo trasera (12),
estando dispuestas dichas carrocerías devehículo delantera y trasera (11, 12) para ser conectadas juntas por unos medios de articulación (13) quecomprenden unos primeros medios de amortiguación y unos segundos medios de amortiguación para proporcionarun giro relativo unos respecto a otros, comprendiendo dicho sistema unos medios de control para controlar dichogiro mediante el control de dichos primeros medios de amortiguación y de dichos segundos medios deamortiguación, caracterizado porque el sistema incluye:
- una primera unidad de control (31), que incluye unos medios para controlar dichos primeros medios deamortiguación, y
- una segunda unidad de control (32), separada de dicha primera unidad de control y que incluye unos mediospara controlar dichos segundos medios de amortiguación.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2007/050975.
Solicitante: SCANIA CV AB (PUBL).
Nacionalidad solicitante: Suecia.
Dirección: 151 87 Södertälje SUECIA.
Inventor/es: CROMNOW,CHRISTER, LYBERGER,RICKARD, RAMDÉN,TERESIA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60D1/32 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60D CONEXIONES PARA VEHICULOS (elementos de los sistemas de frenos B60T 17/04). › B60D 1/00 Conexión de tracción; Enganches; Organos de tracción; Dispositivos de remolque (dispositivos particulares para el enganche de tractores a las máquinas o a los instrumentos agrícolas A01B 59/00; acoplamientos de la quinta rueda B62D). › que comportan dispositivos amortiguadores.
- B62D47/02 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 47/00 Vehículos de motor o remolques, principalmente para transporte de viajeros (carrocerías B62D 31/00). › para transportes en común, p. ej. autobús.
- B62D5/00 B62D […] › Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B).
- B62D53/00 B62D […] › Combinaciones tractor-remolque; Trenes de carretera (dispositivos de acoplado diferentes de los acoplamientos con quinta rueda B60D).
PDF original: ES-2389693_T3.pdf
Fragmento de la descripción:
Sistema de control de articulación.
Campo de la invención
La presente invención se refiere a un sistema de control de articulación para vehículos articulados según el preámbulo de la reivindicación 1. La presente invención también se refiere a un vehículo articulado según la reivindicación 15.
Antecedentes de la invención
El documento EP 0233850 A1 divulga un sistema de articulación según el preámbulo de la reivindicación 1.
Los vehículos largos tienen una serie de ventajas, por ejemplo, permiten una capacidad de carga mayor comparada con vehículos más cortos. Una desventaja, sin embargo, es que una carrocería de un vehículo largo requiere mucho espacio cuando, por ejemplo, gira en una esquina. Por lo tanto, los vehículos largos para utilización urbana a menudo están construidos como vehículos articulados. Ejemplos de vehículos articulados de este tipo son autobuses, camiones articulados y camiones con remolque. La articulación facilita la accesibilidad en áreas urbanas, mientras al mismo tiempo permiten las ventajas de una carrocería de vehículo largo, esto es, una capacidad de pasajeros o una capacidad de carga (transporte) más elevada.
El sistema de transmisión tradicional para vehículos articulados emplea un eje delantero dirigido y un eje de la transmisión en la carrocería de vehículo delantera, por ejemplo, un camión, y uno o más ejes colocados en la carrocería de vehículo trasera, por ejemplo, un remolque. Una solución que funciona de forma similar es común también para los autobuses articulados, en cuyo caso el motor y la transmisión están montados por debajo del suelo entre el eje de la dirección y el eje de la transmisión de la carrocería de vehículo delantera y en el que la carrocería de vehículo delantera tira de la carrocería de vehículo trasera. Las propiedades de conducción de los autobuses de este tipo son similares típicamente a las propiedades de conducción de un camión con remolque.
Una solución de este tipo, sin embargo, impone limitaciones físicas que interfieren con el deseo de tener, en particular con respecto a los autobuses de la ciudad, una construcción que resulte en un suelo tan bajo como sea posible para hacer rápido y fácil el embarque y el desembarque puesto que es difícil conseguir un suelo bajo de este tipo debido al espacio necesario requerido para el motor y la transmisión. Por lo tanto, los autobuses articulados a menudo tienen el motor y la transmisión colocados en la carrocería del autobús trasera, esto es, detrás de la articulación. Sin embargo, una solución en la que la carrocería de vehículo delantera es empujada por la carrocería de vehículo trasera impone propiedades de conducción que difieren sustancialmente de los vehículos sin articular y de los vehículos articulados que tienen la carrocería de vehículo delantera que actúa como un tractor.
Por ejemplo, si la junta de articulación puede ser girada muy libremente, esto es, demasiado no amortiguada, existe el riesgo de que la carrocería de vehículo trasera pueda lanzar fuera e impulsar un eje intermedio, esto es el eje trasero de la carrocería de vehículo delantera, o una parte media del vehículo, los lados, en particular durante las condiciones del invierno y condiciones de otro modo resbaladizas. Además, si la articulación está demasiado no amortiguada durante el funcionamiento a alta velocidad, el vehículo se puede convertir en inestable. Por otra parte, si la articulación está demasiado amortiguada, el giro necesario durante, por ejemplo, el giro en una esquina, se evitará y el vehículo tenderá a continuar recto hacia delante.
Por estas razones, han sido revelados una serie de sistemas de control de articulación, en donde la articulación normalmente está controlada por un mecanismo de amortiguación para proporcionar una constante de amortiguación adecuada de la articulación que dependerá de las condiciones de conducción actuales. Los mecanismos de amortiguación de este tipo normalmente están controlados electrónicamente, en donde la constante de amortiguación, por ejemplo, está controlada sobre la base de parámetros tales como el ángulo de dirección, el ángulo de articulación actual, la velocidad del vehículo, la cantidad del ángulo de articulación y la aceleración del ángulo de articulación.
Sin embargo, los sistemas de amortiguación controlados eléctricamente de este tipo a menudo son incapaces de permitir un funcionamiento del vehículo continuado si el sistema se ve sometido a una avería y, por consiguiente, existe la necesidad de un sistema de amortiguación de la articulación mejorado.
Sumario de la invención
Es un objeto de la presente invención proporcionar un sistema de control de articulación que resuelva los problemas anteriormente mencionados. Este objeto se consigue mediante un sistema según la parte caracterizante de la reivindicación 1.
Según la presente invención el sistema de control de articulación incluye medios de articulación que comprenden
primeros medios de amortiguación y segundos medios de amortiguación, en el que el sistema incluye una primera unidad de control para controlar dichos primeros medios de amortiguación y una segunda unidad de control, separada de dicha primera unidad de control, para controlar dichos segundos medios de amortiguación.
Esto tiene la ventaja de que si uno una de las unidades de control falla en su funcionamiento la otra unidad de control, utilizando sus medios de amortiguación asociados, puede mantener un control satisfactorio del mecanismo de articulación y asegurar de ese modo un funcionamiento continuado del vehículo de una manera segura.
Características adicionales de la presente invención y ventajas de la misma, se pondrán de manifiesto a partir de la siguiente descripción detallada de formas de realización preferidas y los dibujos adjuntos, los cuales se proporcionan a título de ejemplo únicamente y no deben constituir una limitación en modo alguno.
Breve descripción de los dibujos
La figura 1 muestra un vehículo articulado en el cual se puede emplear la presente invención.
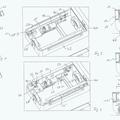
La figura 2 muestra un mecanismo de amortiguación para una junta de articulación.
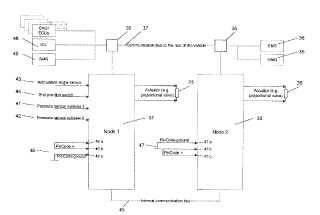
La figura 3 muestra esquemáticamente un sistema de control del mecanismo de amortiguación según la presente invención.
Descripción detallada de formas de realización preferidas
En la descripción y las reivindicaciones de la presente invención, la frase "carrocería de vehículo delantera" se tiene que interpretar como una carrocería de vehículo que tiene por lo menos un eje de la dirección. Además, "carrocería de vehículo trasera" se tiene que interpretar como una carrocería de vehículo que tiene por lo menos un eje trasero y en el que el dicha carrocería de vehículo trasera está dispuesta para que se pueda conectar con dicha carrocería de vehículo delantera utilizando medios de articulación, es decir, una junta giratoria.
Además, en la descripción y las reivindicaciones la expresión unidad de control se tiene que interpretar como una unidad que comprende una lógica de control capaz de intercambiar datos digitales con otras unidades de control.
Como se ha indicado antes, los vehículos articulados a menudo tienen una capacidad incrementada comparada con los vehículos regulares. La figura 1 revela un ejemplo de un vehículo articulado en forma de un autobús 10 en el cual puede ser ventajosamente utilizada la presente invención. El autobús 10 consta de una carrocería de vehículo delantera 11 y una carrocería de vehículo trasera 12, en donde dicha carrocería de vehículo delantera 11 y dicha carrocería de vehículo trasera 12 están acopladas juntas utilizando un mecanismo de articulación 13, el cual será descrito, con mayor detalle más adelante en este documento. La carrocería de vehículo delantera comprende un eje de la dirección 14 (a menudo denominado eje delantero o eje A) para dirigir el vehículo 10, y un segundo eje 15 (eje B del vehículo o eje intermedio) . La carrocería de vehículo trasera comprende un eje de la transmisión 16 (eje C o eje trasero) , el cual es accionado por un motor 17 y una caja de engranajes 18 colocada en el extremo de la carrocería de vehículo trasera 12. Por consiguiente, el vehículo revelado es de una configuración de impulsor en donde la carrocería de vehículo... [Seguir leyendo]
Reivindicaciones:
1. Sistema de control de articulación para ser utilizado con un vehículo articulado (10) que presenta una carrocería de vehículo delantera (11) y una carrocería de vehículo trasera (12) , estando dispuestas dichas carrocerías de vehículo delantera y trasera (11, 12) para ser conectadas juntas por unos medios de articulación (13) que comprenden unos primeros medios de amortiguación y unos segundos medios de amortiguación para proporcionar un giro relativo unos respecto a otros, comprendiendo dicho sistema unos medios de control para controlar dicho giro mediante el control de dichos primeros medios de amortiguación y de dichos segundos medios de amortiguación, caracterizado porque el sistema incluye:
- una primera unidad de control (31) , que incluye unos medios para controlar dichos primeros medios de amortiguación, y
- una segunda unidad de control (32) , separada de dicha primera unidad de control y que incluye unos medios para controlar dichos segundos medios de amortiguación.
2. Sistema según la reivindicación 1, caracterizado porque dichas unidades de control (31, 32) incluyen una lógica de control capaz de intercambiar datos digitales entre sí y/o con otras unidades de control.
3. Sistema según la reivindicación 1 o 2, caracterizado porque dichos medios consisten en unos medios para proporcionar una señal de control a dichos medios de amortiguación.
4. Sistema según la reivindicación 1, en el que por lo menos una de dichas primera y segunda unidades de control (31, 32) incluye unos medios para controlar ambos dichos primeros medios de amortiguación y dichos segundos medios de amortiguación.
5. Sistema según la reivindicación 1, en el que dicha primera unidad de control (31) y dicha segunda unidad de control (32) están dispuestas para ser interconectadas por medio de un enlace de comunicación de datos dedicado (45) .
6. Sistema según cualquiera de las reivindicaciones 1 a 5, caracterizado porque dicha primera unidad de control
(31) está dispuesta para ser conectada a un bus de comunicación del vehículo (37) utilizando unos primeros medios de conexión (35) , y en el que dicha segunda unidad de control (32) está dispuesta para ser conectada al bus de comunicación del vehículo (37) utilizando unos segundos medios de conexión (36) , separados de dichos primeros medios de conexión (35) .
7. Sistema según la reivindicación 5, en el que dicha primera unidad de control (31) está dispuesta para funcionar como un maestro del bus con respecto a la comunicación en dicho bus de comunicación del vehículo, y en el que dicha segunda unidad de control (32) está dispuesta para funcionar como un esclavo del bus.
8. Sistema según la reivindicación 7, en el que dicha segunda unidad de control (32) incluye unos medios para la determinación de si dicha primera unidad de control falla en su funcionamiento y unos medios para funcionar como un maestro del bus cuando dicha primera unidad de control (31) falla en su funcionamiento.
9. Sistema según cualquiera de las reivindicaciones anteriores, caracterizado porque una o ambas de dichas unidades de control (31, 32) incluyen unos medios para la recepción de señales de sensores.
10. Sistema según la reivindicación 9, en el que dichas señales de sensores consisten en señales procedentes de uno o más sensores del grupo constituido por: sensor de ángulo de articulación, sensor de presión de amortiguación, sensor de velocidad del vehículo, sensor de giro de rueda, sensor de ángulo de la dirección, sensor de posición final de articulación.
11. Sistema según cualquiera de las reivindicaciones anteriores, en el que un eje de la transmisión (16) de dicho vehículo articulado (10) está dispuesto en dicha carrocería de vehículo trasera (12) .
12. Sistema según cualquiera de las reivindicaciones anteriores, en el que dicho primer y segundo medios de amortiguación, respectivamente, consisten en cualquiera de entre el grupo constituido por: cilindro hidráulico, cilindro neumático, cilindro accionado por motor eléctrico.
13. Sistema según la reivindicación 1, en el que dichos medios de amortiguación consisten en cilindros hidráulicos y en el que dichas unidades de control están dispuestas para controlar dichos cilindros hidráulicos mediante el control de por lo menos una válvula de accionamiento de los cilindros hidráulicos.
14. Sistema según cualquiera de las reivindicaciones 1 a 13, caracterizado porque cada uno de dicho primer y segundo medios de amortiguación están dimensionados de tal modo que una amortiguación suficiente de dicha unidad de articulación puede ser conseguida individualmente por cualquiera de dichos medios de amortiguación.
15. Vehículo articulado (10) , caracterizado porque incluye un sistema de control de articulación según cualquiera de las reivindicaciones 1 a 14.
Patentes similares o relacionadas:
 Remolque para un tren remolcador, del 31 de Julio de 2019, de JUNGHEINRICH AKTIENGESELLSCHAFT: Remolque para un tren remolcador con un bastidor que presenta un equipo de elevación con una plataforma de elevación sobre la que descansa […]
Remolque para un tren remolcador, del 31 de Julio de 2019, de JUNGHEINRICH AKTIENGESELLSCHAFT: Remolque para un tren remolcador con un bastidor que presenta un equipo de elevación con una plataforma de elevación sobre la que descansa […]
 Tren remolcador con mecanismo elevador, del 26 de Junio de 2019, de LR INTRALOGISTIK GMBH: Remolque de tren remolcador con un bastidor para la recepción de al menos un carro de transporte arrastrado por un tren remolcador, que presenta un chasis […]
Tren remolcador con mecanismo elevador, del 26 de Junio de 2019, de LR INTRALOGISTIK GMBH: Remolque de tren remolcador con un bastidor para la recepción de al menos un carro de transporte arrastrado por un tren remolcador, que presenta un chasis […]
Procedimiento de control de un convoy automóvil de carretera para realizar un desplazamiento en marcha atrás, del 24 de Abril de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Procedimiento de control de un convoy automóvil de carretera para realizar un desplazamiento en marcha atrás, comprendiendo este procedimiento : - la provisión […]
Vehículo articulado con una articulación que puede desplazarse de forma transversal, del 10 de Abril de 2019, de Siemens Mobility GmbH: Vehículo articulado con un primer, y al menos otro, segundo cuerpo del vagón , los cuales están acoplados uno con otro mediante una primera articulación , […]
Tren de remolques sin rieles y procedimiento para guiar un tren de remolques sin rieles, del 2 de Mayo de 2018, de Helmut-Schmidt-Universität: Tren de remolques sin rieles , con al menos un módulo de transporte y al menos dos módulos de eje , en donde cada módulo de transporte está dispuesto […]
Tren lanzadera así como procedimiento de control para un tren lanzadera, del 29 de Noviembre de 2017, de STILL GMBH: Remolque para un tren lanzadera con un dispositivo tractor , especialmente una lanza de tracción delantera y un acoplamiento de remolque […]
Vehículo de carretera motorizado para el trasporte de viajeros, apto para circular solo y a estar articulado a otros vehículos para constituir un tren de carretera., del 28 de Junio de 2017, de NewTL: Vehículo de carretera motorizado para el transporte de pasajeros, que puede circular y funcionar solo, independiente de la energía motriz o conectado a una red de alimentación, […]
Vehículo articulado para el transporte de pasajeros con un sistema de accionamiento mejorado., del 15 de Marzo de 2017, de IVECO FRANCE S.A.: Vehículo articulado para transportar pasajeros, dicho vehículo que comprende al menos: un coche delantero que comprende al menos un eje delantero dirigido […]