Sistema de ayuda al conductor para el reconocimiento del entorno y la detección de una trayectoria nominal.
Procedimiento para el control de un sistema de ayuda al conductor (1) con sensores para la detección del entorno del vehículo,
en el que se vigilan los obstáculos en el entorno del vehículo y, al detectarse un obstáculo, se modifica de tal modo la trayectoria nominal del vehículo que se hace posible un paso sin peligro por el obstáculo detectado, por medio de que se detecta la anchura de un obstáculo y se asocia al obstáculo detectado una zona de seguridad que supera la anchura del obstáculo, caracterizado porque se clasifica el obstáculo y porque se determina el tamaño de la zona de seguridad alrededor del obstáculo en función de la clasificación.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08102216.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: C/IPE POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: WEILKES, MICHAEL, SCHERL, MICHAEL, Buerkle,Lutz, Rentschler,Tobias.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W30/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Anticipación o prevención de colisiones probables o inminentes.
- B60W50/08 B60W […] › B60W 50/00 Detalles de los sistemas de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular. › Interacción entre el conductor y el sistema de control.
- G08G1/16 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas anticolisión.
PDF original: ES-2384899_T3.pdf
Fragmento de la descripción:
Sistema de ayuda al conductor para el reconocimiento del entorno y la detección de una trayectoria nominal
Estado de la técnica
La invención se refiere a un procedimiento para el control de un sistema de ayuda al conductor según el preámbulo de la reivindicación 1. Asimismo la invención se refiere a un dispositivo para el control de un sistema de ayuda al conductor conforme a la reivindicación 15. Ya se conocen sistemas de ayuda al conductor que apoyan al conductor a la hora de mantener un carril de circulación elegido. El sistema de ayuda al conductor comprende para esto funciones de ayuda como LDW (Lane Departure Warning) y LKS (Lane Keeping Support) . La función de ayuda LDW avisa al conductor cuando abandona el carril de circulación mediante la generación de señales ópticas y/o acústicas y/o hápticas. La función de ayuda LKS interviene activamente en sistemas de a bordo del vehículo, en especial en el sistema de dirección, para mantener en el carril de circulación un vehículo que se desvía del carril de circulación. El sistema de ayuda al conductor comprende para esto un sistema sensorial, que comprende en especial al menos un sensor de video, para la detección de marcas de carril de circulación, etc.
Los sistemas de ayuda al conductor conocidos hasta ahora con funciones de conducción transversal como por ejemplo LDW, LKS o una conducción transversal automática en un sistema de ayuda en atascos, intentan conducir el vehículo lo más centrado posible en el carril de circulación. La mayoría de los conductores consideran sin embargo que es más bien incómodo mantener con mucha precisión el centro del carril de circulación propio, si un vehículo sobre un carril de circulación adyacente circula muy cerca del límite con el carril de circulación propio o incluso invade el límite de carril de circulación y, de este modo, entra en el carril de circulación propio. Esta situación se considera especialmente incómoda o inclusa peligrosa si en el caso del vehículo sobre el carril adyacente se trata de un vehículo grande, como por ejemplo un camión o un autobús.
Del documento DE 10 2004 015 749 A1 se conoce un dispositivo para determinar una posibilidad de paso para un vehículo por obstáculos, que sirve para estimar si un vehículo puede circular entre obstáculos con relación a su altura de vehículo y/o a su anchura de vehículo. El dispositivo comprende una unidad sensora para medir la anchura de paso entre obstáculos y/o una altura de paso bajo obstáculos y una unidad de valoración, en donde mediante la unidad de valoración se compara la anchura de paso establecida y/o la altura de paso establecida con una anchura de vehículo y/o altura de vehículo, de tal modo que se emite un aviso para el caso en el que la altura de paso establecida y/o la anchura de paso establecida no autoricen una posibilidad de paso del vehículo por los obstáculos.
Del documento DE 10 2005 021 845 A1 se conoce un sistema de apoyo al mando del vehículo, que comprende un ordenador de velocidad de derrape de apoyo, que calcula mediante un dispositivo de radar una magnitud de movimiento necesaria para evitar un obstáculo sobre la base de un resultado de detección del obstáculo. El sistema de apoyo al mando del vehículo comprende además un aparato de control de movimiento del vehículo, que controla el movimiento transversal del vehículo sobre la base de la magnitud de movimiento calculada. Cuando un detector de mando de evitación determina que un conductor active un mando de evitación de obstáculos, el aparato de control de movimiento del vehículo acciona un dispositivo de frenado para controlar el movimiento transversal del vehículo, de tal modo que el obstáculo pueda evitarse o esquivarse de forma fiable. Cuando un detector de mando de recuperación determina la activación de un mando de recuperación, gestiona el aparato de control de movimiento del vehículo un dispositivo de servodirección, para influir en el movimiento transversal del vehículo, de tal modo que se supriman un retardo del mando de dirección por parte del conductor y un mando de recuperación demasiado intenso del volante para compensar el retardo, para por medio de esto estabilizar el comportamiento de circulación. Por medio de esto se proporciona un sistema de apoyo al mando del vehículo, que puede apoyar correctamente tanto un mando de evitación de obstáculos como un mando de recuperación por parte del conductor.
Del documento DE 10 2005 002 760 A1 se conocen un dispositivo y un procedimiento para evitar accidentes en vehículos de motor. El procedimiento comprende los pasos: establecimiento de una imagen de situación digital del entorno de un vehículo mediante un sistema de detección del entorno de circulación, asociación de un modelo dinámico a cada objeto detectado y al vehículo para obtener un modelo del entorno, cuyo sistema de coordenadas esté fijado a la calzada y se mueve junto con el vehículo, realización de un reconocimiento de colisión con relación a los objetos detectados y al vehículo, en donde el vehículo y los objetos se describen en el modelo del entorno con una forma geométrica prefijada, el reconocimiento de colisión establece las magnitudes tiempo de colisión y lugar de colisión, de los que se determina un desvío lambda que reproduce la situación de colisión, y a partir de la inseguridad del desvío lambda se establece una probabilidad de colisión, planeamiento de una evitación de colisión en el caso de la colisión anterior, en donde la evitación de colisión es una maniobra de emergencia asentada en la zona límite física de circulación, que se compone de los componentes frenado y desvío hacia la izquierda o la derecha sobre una trayectoria predicha, en donde el proceso de frenado tiene prioridad frente a las maniobras de desvío y la maniobra de emergencia finaliza en especial con la detención del vehículo, y realización de la maniobra de emergencia planeada.
Del documento EP 1 475 765 A2 se conoce un dispositivo para determinar una posibilidad de paso para un vehículo por obstáculos, en especial para vehículos de motor, con una unidad sensora para medir una anchura de paso entre obstáculos y/o una altura de paso bajo obstáculos y con una unidad de valoración, en donde mediante la unidad de valoración se compara la anchura de paso facilitada y/o la altura de paso facilitada con una anchura de vehículo y/o altura de vehículo, de tal modo que se emite un aviso para el caso en el que la altura de paso establecida y/o la anchura de paso establecida no autoricen una posibilidad de paso del vehículo por los obstáculos.
Manifiesto de la invención Tarea técnica La invención se ha impuesto la tarea de perfeccionar de tal modo un sistema de ayuda al conductor, que se facilite al conductor una mayor sensación de seguridad, en especial al pasar por estrechamientos. Por estrechamientos en el sentido de la presente invención deben entenderse en especial también estrechamientos dinámicos de la calzada, que se producen por ejemplo a causa de que un vehículo no mantenga su trayectoria sobre un carril adyacente, sino que se aproxime de forma inadmisible al carril adyacente o incluso entre en el carril propio.
Solución técnica La solución conforme a la invención consiste, partiendo del procedimiento del género expuesto, en que se vigilan los obstáculos en el entorno del vehículo y, al detectarse un obstáculo, se modifica de tal modo la trayectoria nominal del vehículo que se hace posible un paso sin peligro por el obstáculo detectado. Con ello se detecta la anchura del obstáculo y se asocia al obstáculo detectado una zona de seguridad que supera la anchura del obstáculo. En función de la anchura del obstáculo se clasifica el obstáculo y, por ejemplo, se califica como turismo o camión. De forma correspondiente a esta clasificación se asocia al respectivo obstáculo una zona de seguridad prefijada.
Debido a que aumenta el riesgo de una colisión conforme aumenta la velocidad, puede determinarse el tamaño de la zona de seguridad ventajosamente en función de la velocidad, en especial en función de la velocidad relativa entre el vehículo y el obstáculo.
Para alcanzar la zona de seguridad para un paso sin riesgo por el obstáculo, se modifica la trayectoria nominal del vehículo ventajosamente a tiempo antes de alcanzar el obstáculo en una zona de transición. Con ello la longitud de la zona de transición es función ventajosamente de la velocidad, en especial de la velocidad relativa entre el vehículo y el obstáculo. De este modo se evitan correcciones abruptas de dirección del vehículo al pasar por... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el control de un sistema de ayuda al conductor (1) con sensores para la detección del entorno del vehículo, en el que se vigilan los obstáculos en el entorno del vehículo y, al detectarse un obstáculo, se modifica de tal modo la trayectoria nominal del vehículo que se hace posible un paso sin peligro por el obstáculo detectado, por medio de que se detecta la anchura de un obstáculo y se asocia al obstáculo detectado una zona de seguridad que supera la anchura del obstáculo, caracterizado porque se clasifica el obstáculo y porque se determina el tamaño de la zona de seguridad alrededor del obstáculo en función de la clasificación.
2. Procedimiento según la reivindicación 1, caracterizado porque la zona de seguridad en el caso de un camión como obstáculo se elige mayor que en el caso de un turismo como obstáculo.
3. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque el tamaño de la zona de seguridad se determina en función de la velocidad.
4. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque el tamaño de la zona de seguridad se determina en función de la velocidad relativa entre el vehículo (24) y el obstáculo.
5. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque el tamaño de la zona de seguridad se determina en función de la velocidad del vehículo.
6. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque el tamaño de la zona de seguridad es proporcional a la velocidad del vehículo o proporcional a la velocidad relativa entre el vehículo (24) y el obstáculo.
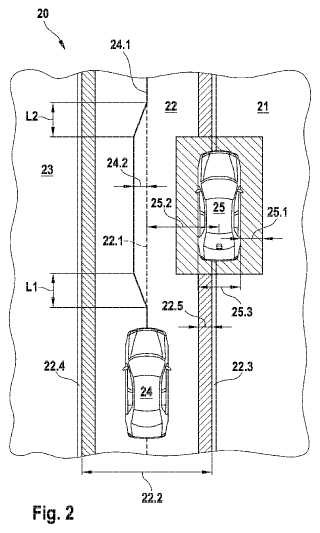
7. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque después de la detección de un obstáculo se modifica la trayectoria nominal del vehículo en una zona de transición (L1, L2) , en donde las zonas de transición (L1, L2) están situadas delante y detrás del obstáculo (vehículo 25) .
8. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque la longitud de la zona de transición (L1, L2) es función de la velocidad relativa entre el vehículo (24) y el obstáculo (vehículo 25) .
9. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque la longitud de la zona de transición (L1, L2) es función de la velocidad del vehículo (24) .
10. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque los puntos iniciales de las zonas de transición (L1, L2) se eligen en función de la velocidad.
11. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque al límite de carril de circulación que limita al carril de circulación se asocia una zona de seguridad.
12. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque la transición entre diferentes valores nominales del desplazamiento transversal se realiza constantemente.
13. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque para la modificación de la trayectoria del vehículo (24) se determina un valor nominal del desplazamiento transversal, que se determina según la siguiente ecuación:
En la misma significan: Ysoll = valor nominal del desplazamiento transversal del vehículo propio bF = anchura del carril de circulación sF = anchura de la zona de seguridad alrededor del límite de carril de circulación yH = desplazamiento transversal del obstáculo
bH = anchura del obstáculo sH = anchura de la zona de seguridad alrededor del obstáculo.
14. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque, teniendo en cuenta los límites de carril de circulación y el valor nominal del desplazamiento transversal, se establece la anchura del pasillo libre y porque se genera una señal de aviso, y/o al conductor se asocia la conducción transversal del vehículo si la anchura del vehículo (24) supera la anchura del pasillo libre.
15. Dispositivo para el control de un sistema de ayuda al conductor (1) con sensores para la detección del entorno del vehículo, en el que están previstos medios que vigilan los obstáculos en el entorno del vehículo y que, al detectarse un obstáculo, modifican de tal modo la trayectoria nominal del vehículo que se hace posible un paso sin peligro por el obstáculo detectado, caracterizado porque el dispositivo comprende medios para una clasificación de un vehículo reconocido como obstáculo potencial.
Patentes similares o relacionadas:
DISPOSITIVO LUMÍNICO ACÚSTICO DE EMERGENCIA Y ALERTA TEMPRANA, del 30 de Julio de 2020, de CALOMARDE LORENTE, Daniel: Dispositivo lumínico acústico de emergencia y alerta temprana consistente en un conjunto de elementos destinados a informar en alerta temprana […]
Sistema anti acoso y anti colisión trasero para vehículos motorizados, del 20 de Julio de 2020, de ARBEX CALLES, Juan Ignacio: El sistema anti acoso y anti colisión trasero para vehículos motorizados, pretende disuadir, educar y si fuera necesario facilitar la identificación del infractor, […]
Procedimiento y sistema de aviso de colisión para la detección de vehículos en dirección contraria, del 24 de Junio de 2020, de Siemens Mobility GmbH: Procedimiento para la detección de vehículos de transporte en dirección contraria en un sistema de transporte con rutas fijas, que presenta las […]
Sistema de visualización de un vehículo, del 24 de Junio de 2020, de LEIA INC: Un sistema de vigilancia de vehículos que comprende: un escáner tridimensional 3D, configurado para escanear una región adyacente […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
MÉTODO Y SISTEMA PARA CONTROLAR UNA PLURALIDAD DE VEHÍCULOS AUTÓNOMOS, del 11 de Junio de 2020, de SEAT, S.A.: La presente invención se refiere a un método para controlar una pluralidad de vehículos autónomos, donde el método comprende las etapas de determinar una situación […]
DISPOSITIVO ELECTRÓNICO DE SEGURIDAD, del 20 de Marzo de 2020, de PETRONICS TECNOLOGIA S.L: Dispositivo electrónico de seguridad independiente del vehículo apto para ser fijado al vehículo que comprende una cámara de video que grava en continuo […]
Caracterización de una colisión de vehículo, del 8 de Enero de 2020, de GEOTAB Inc: En el presente documento se describen ejemplos de un sistema que procesa información que describe el movimiento de un vehículo en un momento relacionado con una posible […]