Procedimiento de obtención de imágenes calibradas de posición de centros de tubos de un sistema con distribución regular de tubos.
Procedimiento de obtención de imágenes calibradas de posición de centros de tubos de un sistema con distribución regular de tubos.
Procedimiento de obtención de imágenes calibradas de posición de centros de tubos T de un sistema con distribución regular de tubos T y conocida en modelo en tres dimensiones, en el que se desplaza una cámara montada en un robot sobre dichas entradas para obtener imágenes de éstas, que comprende una primera etapa de calibración de las imágenes a partir de la distancia entre los tubos T obtenida del modelo geométrico en tres dimensiones y unas etapas sucesivas de desplazamiento de la cámara, adquisición de una nueva imagen y cálculo del desplazamiento de la cámara a partir de dicha nueva imagen, en el que antes del cálculo de cada desplazamiento se vuelve a calibrar la imagen mediante la obtención en la imagen de todos los centros geométricos de los tubos T identificados en la imagen, de modo que es posible obtener con alta precisión el desplazamiento real de la cámara.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230843.
Solicitante: TECNATOM,S.A..
Nacionalidad solicitante: España.
Inventor/es: PIÑEIRO FERNÁNDEZ,Pablo Jesús, GUERRA SÁIZ,Francisco Javier.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T7/20 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 7/00 Análisis de imagen. › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
Fragmento de la descripción:
Procedimiento de obtención de imágenes calibradas de posición de centros de tubos de un sistema con distribución regular de tubos
La presente invención se refiere a un procedimiento de obtención de imágenes calibradas de posición de centros de tubos de un sistema con distribución regular de tubos que permite obtener con alta precisión el desplazamiento real de la cámara y entonces establecer una relación correcta entre la posición real de los tubos y la de su imagen correspondiente así como obtener una imagen reconstruida a escala de todo el sistema de tubos. Se aplica preferentemente a evaporadores y a condensadores.
Antecedentes de la invención
La inspección de un generador de vapor supone explorar una matriz de unos 5.000 tubos mediante una sonda de corrientes inducidas que recorre la longitud total de cada uno. Un robot tipo araña que se mueve por debajo de la matriz se encarga de posicionar un tubo-guía en la embocadura del tubo, proporcionando al sistema de adquisición de datos las coordenadas del tubo en formato (Fila, Columna) , de modo que se almacena dicha información integrada con la señal de corrientes inducidas. En general el robot sigue una trayectoria recorriendo tubos según un plan de inspección que se programa antes del inicio de la misma.
Los datos de la inspección se analizan posteriormente y si se detectan problemas estructurales se puede decidir taponar el tubo. Por tanto una identificación libre de errores es fundamental.
Las normativas actuales recomiendan disponer de un segundo sistema independiente al robot que proporcione las coordenadas del tubo bajo inspección de forma redundante. De esta manera la seguridad en cuanto a identificación es máxima.
Existen diversas formas de implementar un sistema de identificación redundante, algunos basados en la cuantificación de movimiento mediante sensores inerciales, otros mediante la medida precisa de la distancia a puntos de referencia del generador de vapor y otros basados en visión artificial mediante seguimiento y contaje de los tubos a medida que se desplaza el robot.
Una vez decidido implementar un sistema de visión para identificación redundante de tubos, deben de satisfacerse los siguientes requisitos:
a) Disponer de un sistema que mediante visión artificial permita una identificación de forma independiente al control / operación del robot. b) El sistema debe alertar cuando haya una discrepancia entre el tubo identificado por el robot y el obtenido por visión artificial. c) Debe haber una integración con el sistema de adquisición de datos que aborte la operación en caso de discrepancia. d) La solución debe ser válida para cualquier robot de inspección GGVVs y cualquier generador, ya sean verticales (geometría casquete esférico) u horizontales (geometría cilíndrica) . e) La solución debe ser robusta e inmune a la problemática de la iluminación y a los movimientos rápidos que efectúa el robot.
El robot incorpora una cámara adosada al tubo guía que envía las imágenes al procesador mediante una conexión Ethernet. El procesador visto como una caja negra se encarga de obtener las coordenadas del tubo bajo inspección y “las publica” mediante internet para que otros sistemas utilicen dicha información.
Típicamente existirá un árbitro que se encarga de obtener las identificaciones tanto del robot como del sistema de visión y dar alarma en caso de discrepancia, de modo que el operador pueda resolver la situación.
La publicación de las coordenadas permite que haya una supervisión adicional del sistema mediante un centro de control remoto.
En este contexto, son conocidos los procedimientos de obtención de imágenes calibradas de posición de centros de tubos de un sistema con distribución regular de tubos y conocida en modelo en tres dimensiones, en el que se desplaza una cámara montada en un robot sobre dichas entradas para obtener imágenes de estas, que comprende una primera etapa de calibración de las imágenes a partir de la distancia entre los tubos obtenida del modelo geométrico en tres dimensiones y unas etapas sucesivas de desplazamiento de la cámara, adquisición de una nueva imagen y cálculo del desplazamiento de la cámara a partir de dicha nueva imagen.
Son ejemplos de un procedimiento como este los que se describen en el documento WO0003846A1 a nombre de ABB relativo a un sistema de verificación visual de posición de tubos y en la patente US5838882A relativa a un seguidor y controlador de posición dinámico de robots.
Sin embargo, los inventores de la presente invención consideran que los procesos de calibración llevados a cabo en estos procedimientos del estado de la técnica no proporcionan una precisión óptima en el posicionamiento de los tubos en las imágenes obtenidas, en especial a las velocidades de barrido de los robots empleados.
Descripción de la invención
Por lo tanto, para superar las limitaciones del estado de la técnica, la presente invención propone un procedimiento de obtención de imágenes calibradas de posición de centros de tubos de un sistema con distribución regular de tubos y conocida en modelo en tres dimensiones, en el que se desplaza una cámara montada en un robot sobre dichas entradas para obtener imágenes de estas, que comprende una primera etapa de calibración de las imágenes a partir de la distancia entre los tubos obtenida del modelo geométrico en tres dimensiones y unas etapas sucesivas de desplazamiento de la cámara, adquisición de una nueva imagen y cálculo del desplazamiento de la cámara a partir de dicha nueva imagen, que se caracteriza por el hecho de que antes del cálculo de cada desplazamiento se vuelve a calibrar la imagen mediante la obtención en la imagen de todos los centros geométricos de los tubos identificados en la imagen, de modo que es posible obtener con alta precisión el desplazamiento real de la cámara.
Este procedimiento permite movimientos de alta velocidad del robot por incorporar un algoritmo de estimación de posición a partir de las imágenes anteriores y hacer una reconstrucción fotográfica del plano de tubos con alta resolución, detectando movimientos inferiores a 1mm.
Según diversas características opcionales del procedimiento:
- la calibración realizada después de cada desplazamiento se realiza mediante todas las combinaciones dos a dos de entre las imágenes de los tubos identificados;
- de cada pareja de tubos se obtiene un origen, un ángulo de posicionamiento relativo y un factor de escala según cada una de las dos dimensiones de desplazamiento entre los dos tubos;
- en el procedimiento se va estableciendo una relación entre la posición de los centros de los tubos identificados y su numeración en el generador;
- la obtención de la imagen de los centros geométricos de los tubos se realiza con las subetapas de:
- Obtener una imagen de los tubos;
- Definir un nivel luminosos de corte para distinguir los píxeles correspondientes a los tubos;
- Detectar los círculos por análisis de la forma de los objetos;
- Calcular los centros de los círculos;
- las imágenes se obtienen con un nivel de iluminación estable y uniforme;
- el sistema de tubos es un intercambiador de calor de un generador de vapor, de un condensador o similar;
La invención también se refiere a un procedimiento de reconstrucción fotográfica de una imagen única del plano de tubos de un sistema con distribución regular de tubos y conocida en modelo en tres dimensiones a partir de imágenes tomadas por una cámara, en el que se emplean imágenes calibradas obtenidas según cualquiera de las variantes anteriores.
Breve descripción de las figuras
Para mejor comprensión de cuanto se ha expuesto se acompañan unos dibujos en los que, esquemáticamente y tan sólo a título de ejemplo no limitativo, se representa un caso práctico de realización.
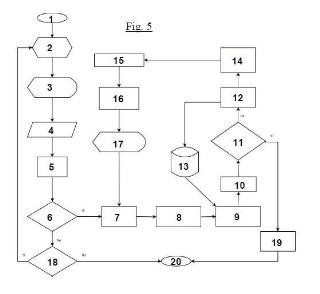
La figura 1 es la imagen original tal como es obtenida por la cámara, representada a escala de grises. La figura 2 es la imagen obtenida tras la umbralización y binarización de los píxeles de la imagen original. La figura 3 representa la búsqueda de círculos. ...
Reivindicaciones:
1. Procedimiento de obtención de imágenes calibradas de posición de centros de tubos (T) de un sistema con distribución regular de tubos (T) y conocida en modelo en tres dimensiones, en el que se desplaza una cámara montada en un robot sobre dichas entradas para obtener imágenes de estas, que comprende una primera etapa de calibración de las imágenes a partir de la distancia entre los tubos (T) obtenida del modelo geométrico en tres dimensiones y unas etapas sucesivas de desplazamiento de la cámara, adquisición de una nueva imagen y cálculo del desplazamiento de la cámara a partir de dicha nueva imagen, caracterizado por el hecho de que antes del cálculo de cada desplazamiento se vuelve a calibrar la imagen mediante la obtención en la imagen de todos los centros geométricos de los tubos (T) identificados en la imagen, de modo que es posible obtener con alta precisión el desplazamiento real de la cámara.
2. Procedimiento según la reivindicación anterior, en el que la calibración realizada después de cada desplazamiento se realiza mediante todas las combinaciones dos a dos de entre las imágenes de los tubos identificados.
3. Procedimiento según la reivindicación anterior, en el que de cada pareja de tubos se obtiene un origen, un ángulo de posicionamiento relativo y un factor de escala según cada una de las dos dimensiones de desplazamiento entre los dos tubos.
4. Procedimiento según cualquiera de las reivindicaciones anteriores, en el que se va estableciendo una relación entre la posición de los centros de los tubos identificados y su numeración en el generador,
5. Procedimiento según cualquiera de las reivindicaciones anteriores, en el que la obtención de la imagen de los centros geométricos de los tubos se realiza con las subetapas de:
- Obtener una imagen de los tubos; -Definir un nivel luminoso de corte para distinguir los píxeles correspondientes a los tubos; -Detectar los círculos por análisis de la forma de los objetos; -Calcular los centros de los círculos;
6. Procedimiento según la reivindicación anterior, en el que las imágenes se obtienen con un nivel de iluminación estable y uniforme.
7. Procedimiento según cualquiera de las reivindicaciones anteriores, en el que el sistema de tubos es un intercambiador de calor de un generador de vapor, de un condensador o similar.
8. Procedimiento de reconstrucción fotográfica de una imagen única del plano de tubos de un sistema con distribución regular de tubos y conocida en modelo en tres dimensiones a partir de imágenes tomadas por una cámara, en el que se emplean imágenes calibradas obtenidas según cualquiera de las reivindicaciones anteriores.
Fig. 1
T
Fig. 2
Fig. 3
Fig. 4
Patentes similares o relacionadas:
Desplazamiento de inhibición de un dispositivo recargable inalámbricamente, del 26 de Febrero de 2020, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método para inhibir el desplazamiento de un dispositivo recargable inalámbricamente posicionado en una superficie de carga subyacente […]
Sistemas y métodos de seguimiento de objetos asociativos, del 8 de Enero de 2020, de Isolynx, LLC: Un aparato de seguimiento asociativo para seguir un primer objeto (402 , 1206) usando información de seguimiento para el primer objeto (402 , 1206) e información […]
Procedimiento de estimación de flujo óptico a partir de un sensor de luz asíncrono, del 18 de Diciembre de 2019, de Sorbonne Université: Procedimiento de estimación de flujo óptico, que comprende: - recibir información asíncrona proveniente de un sensor de luz que tiene una matriz de píxeles dispuestos […]
Metrología en vivo de un objeto durante la fabricación u otras operaciones, del 21 de Agosto de 2019, de THE BOEING COMPANY: Un método para metrología en vivo de un objeto, que comprende: realizar una operación de escaneado mediante una pluralidad de sensores para […]
Procedimiento y dispositivo para la detección de objetos en movimiento en una secuencia de imágenes de vídeo, del 19 de Junio de 2019, de Airbus Defence and Space GmbH: Procedimiento para la detección de objetos en movimiento en una secuencia de imágenes de vídeo que comprende los pasos de: a) determinación de […]
Método y sistema para generar una representación 3D en una escena 3D dinámicamente cambiante, del 13 de Mayo de 2019, de VIZRT AG: Método para llenar los huecos que quedan en el fondo de una imagen después de recortar los objetos del fondo, que comprende las etapas […]
Sistema y método para medir el flujo del tráfico de un área, del 26 de Abril de 2019, de CUENDE INFOMETRICS, S.A.: Un sistema para estimar el flujo del tráfico real de un área, comprendiendo el sistema : • imágenes aéreas de un área tomadas a intervalos […]
Método implementado por ordenador y sistema para procesamiento de video con consistencia en el tiempo, del 15 de Abril de 2019, de RATIONAL PIXELS S.L: Un metodo implementado por ordenador para editar una secuencia de video con consistencia en el tiempo que comprende las etapas de: i) calcular un campo de movimiento […]