MÁQUINA AUTOMÁTICA DE NIVELACIÓN Y ALINEACIÓN DE VÍA FERROVIARIA EN PLACAS, PREVIAS AL HORMIGONADO.
Máquina automática de nivelación y alineación de vía ferroviaria en placa,
previas al hormigonado, que presenta una estructura (1) que se desplaza a lo largo de la vía, provista de elementos de sujeción para, una vez situada en la sección de vía a posicionar, agarrar firmemente ambos carriles (10) manteniendo la vía en suspensión mientras efectúa movimientos milimétricos de desplazamiento hasta situarla en la posición final deseada, tanto en planta como en altura de los carriles y peralte; dicha máquina dispone de un sistema de medición, que incluye sensores de inclinación (11) y una estación total (12), de tipo topográfica o GPS, que permiten identificar la posición real de la vía, en tiempo real. Dispone asimismo de un sistema de control que incluye un software de proceso de los datos de posición adquiridos por los dispositivos de medición (11-12), a partir de los cuales determina los movimientos requeridos que ha de realizar para alcanzar la posición de la vía final deseada
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201130426.
Solicitante: TECSA EMPRESA CONSTRUCTORA, S.A..
Nacionalidad solicitante: España.
Provincia: VIZCAYA.
Inventor/es: AGUIRRE FERNÁNDEZ,José Mª.
Fecha de Solicitud: 24 de Marzo de 2011.
Fecha de Publicación: .
Fecha de Concesión: 8 de Febrero de 2012.
Clasificación PCT:
- E01B29/05 CONSTRUCCIONES FIJAS. › E01 CONSTRUCCION DE CARRETERAS, VIAS FERREAS O PUENTES. › E01B VIAS FERREAS; HERRAMIENTAS PARA VIAS FERREAS; MAQUINAS PARA LA CONSTRUCCION DE VIAS FERREAS DE CUALQUIER TIPO (dispositivos descarriladores o para situar los vehículos en la vía, frenos de vía o dispositivos ralentizadores B61K; retirada de materia indeseable de las vías de ferrocarril, control de la vegetación, applicación de líquidos E01H). › E01B 29/00 Colocación, reparación o alzamiento de la vía; Herramientas o máquinas "ad hoc" (E01B 27/00, E01B 31/00 tienen prioridad). › Transporte, colocación, alzamiento o reemplazamiento simultáneo de carriles y de traviesas (sin desarmarlos E01B 29/02).
Fragmento de la descripción:
Máquina automática de nivelación y alineación de vía ferroviaria en placa, previas al hormigonado.
Objeto de la invención
La invención, como su propio título indica, se refiere a una máquina destinada a nivelar y alinear de forma automática y con precisión una vía ferroviaria en placa antes de proceder a su hormigonado. Partiendo de la posición inicial de los carriles -o el conjunto formado por los carriles fijados ya a las traviesas en lo que se denomina "vía premontada" o "vía en esqueleto"- previamente tendidos sobre una base previa -solera de la futura vía en placa-, la máquina es capaz de sujetarlos y desplazarlos con los movimientos necesarios para conseguir desde esa posición de partida la posición final deseada, siendo una vez posicionados con precisión fijados mediante unos medios de sustentación en esa posición suspendida, pudiéndose proceder entonces a hormigonar el conjunto sobre la base previa sobre la que se ha asentado, constituyendo la losa de hormigón formada el medio soporte que sustituye al balasto de una vía tradicional.
Una vía férrea en placa está formada de forma genérica por dos carriles unidos a través de sujeciones a unas traviesas, bloques individuales, bastidores o simplemente sujeciones directas en su parte inferior, existiendo multitud de tipologías. En una vía en placa se colocan los carriles y las traviesas/bloques/sujeciones directas, y una vez que este conjunto se ha posicionado adecuadamente con las estrictas tolerancias requeridas, se fija en su posición definitiva y se hormigona para conseguir la llamada vía hormigonada. La posición de la vía viene definida por un trazado y una sección. El trazado queda definido por una altimetría y una planimetría. En cuanto a la sección transversal, se define mediante un peralte en cada posición, además de una serie de condicionantes: las cabezas de los dos carriles forman un plano de rodadura, la distancia entre los dos carriles debe ser fija y simétrica respecto al eje central de la vía, y su eje vertical debe tener habitualmente una inclinación respecto al eje vertical perpendicular al plano de rodadura definido. Las tolerancias de estos parámetros son, en general, muy estrictas, y todo esto hace que se trate de un sistema geométricamente complejo.
Partiendo de la vía en esqueleto -es decir, una vez asentados y fijados los carriles sobre las traviesas/bloques/sujeciones, estos a su vez asentados sobre la base previa o solera-, la construcción de "vía en placa" requiere el empleo de medios de nivelación y alineación que realicen los desplazamientos necesarios para establecer la posición exacta del conjunto carriles-sujeciones, momento en el cual, previa fijación del conjunto de forma definitiva en esa posición final exacta alcanzada a través de unos medios de sustentación, se procede a hormigonar el conjunto sobre la base previa, constituyendo la losa de hormigón formada el medio soporte de los carriles, sustituyendo al balasto de la vía tradicional. Se requieren procesos de nivelación, alineación y fijación de la vía en su posición de una elevada precisión, por lo que esta actividad es fundamental en el proceso de construcción de vías férreas de este tipo.
Antecedentes de la invención
El proceso de nivelación y alineación de la vía en placa hoy en día es un proceso manual, muy poco automatizado, que se realiza efectuando aproximaciones sucesivas, y que requiere de sucesivas comprobaciones topográficas mediante aparatos de medición y personal de topografía externos, que debe ir midiendo y transmitiendo la posición que van adquiriendo los carriles durante el proceso para que ésta pueda ir corrigiéndose mediante el procedimiento habitual empleando gatos, husillos alineadores o niveladores, hasta llegar finalmente a la posición definitiva. Es decir, comenzando por un primer levante de aproximación, y tras la correspondiente comprobación topográfica externa de la posición conseguida, la información obtenida de la medición efectuada debe ser transmitida por parte del personal de topografía al personal encargado del posicionado físico de la vía, momento en el cual se puede volver a corregir de nuevo de forma manual la posición y a comprobar nuevamente, y así sucesivamente hasta que se verifica que la posición de la vía está dentro de las tolerancias exigidas, momento en el que, tras fijar firmemente la posición, se puede hormigonar. La posición de los carriles se mide generalmente mediante una estación topográfica y un prisma soportado por un operario sobre la cara activa del carril -pudiendo utilizarse además una regla de peralte-, o bien mediante la utilización de un carrito auscultador de vía, o empleando un sistema topográfico mixto entre ambas opciones.
Una alternativa a este proceso, que también se suele utilizar, consiste en el mareaje previo en referencias fijas de la posición final cada cierta longitud de vía. En este caso, el trabajo topográfico se realiza con antelación, y el acercamiento a la posición final marcada en cada sección de vía se realiza tomando como referencia esos datos previamente marcados realizando comprobaciones manuales sucesivas.
Estos métodos, así como otros existentes, todos ellos manuales y nada automatizados, suponen que el proceso actual sea extremadamente lento y tenga un coste elevado.
Descripción de la invención
El objeto de la presente invención es una máquina capaz de nivelar y alinear la vía mediante un sistema hidráulico hasta dejarla en su posición exacta, de una forma completamente automática y sin la intervención humana, en un solo paso, de forma que en ese momento se pueda fijar la vía y proceder posteriormente al hormigonado. La máquina está formada por una estructura metálica móvil constituida por varios cuerpos, un sistema hidráulico y eléctrico y un sistema de control y de medición de vía propios que posibilitan sus movimientos y desplazamiento, de forma que, una vez posicionada sobre los carriles en una sección determinada de la vía premontada -en esqueleto- a posicionar, es capaz de sujetar firmemente ambos carriles de la vía mediante unos elementos de sujeción, y desplazarla hasta su posición final: levantando cada uno de los carriles hasta la altura necesaria y desplazándolos lateralmente, hasta alcanzar la posición definitiva, todo ello de forma automática.
Para permitir el movimiento automático se ha desarrollado e incorporado un sistema de control, un software y un sistema propio de medida. Mediante el sistema de medida propio la máquina es capaz de medir y obtener la posición real de la vía en el espacio en tiempo real. A través del software, es capaz de comparar esta posición real instantánea con la posición final teórica previamente introducida o definida, obteniendo en tiempo real la diferencia entre ambas, y por lo tanto los desplazamientos necesarios para alcanzar esta última. A través de los elementos integrantes del sistema de control estos datos de desplazamiento necesario son procesados y transmitidos a los cilindros del sistema hidráulico, que realizan físicamente los movimientos requeridos. Al ser todo este proceso en tiempo real, la nueva posición una vez iniciado el movimiento es detectada por el sistema de medida y procesada por el software y el sistema de control. Los nuevos datos de desplazamiento requerido, es decir, la nueva diferencia recalculada entre la nueva posición real y la posición final teórica, es transmitida nuevamente al sistema hidráulico. Se trata por tanto de un proceso cíclico en tiempo real. Este proceso cíclico da comienzo una vez se ha situado la máquina en la sección de vía a posicionar y ha sujetado los carriles mediante los elementos de sujeción. En ese momento da comienzo el ciclo de posicionado: la captación de datos se produce de forma continua, así como su posterior tratamiento, procesado, transmisión al sistema motriz y materialización de los movimientos, dando lugar a un proceso de realimentación continuo -aproximando la vía paulatinamente a su posición teórica final en cada ciclo- repitiéndose hasta que la vía alcance finalmente la posición teórica deseada dentro de las tolerancias exigidas, momento en que se interrumpirá el proceso y el movimiento, dando por finalizado el proceso cíclico, y por tanto el posicionado. Se constituye por lo tanto un ciclo cerrado de control automático, siendo, una vez comienza el proceso, la posición de la vía cada vez más próxima a la posición final objetivo hasta alcanzar finalmente esa posición, momento en que se interrumpe el proceso y por tanto el movimiento.
Una vez posicionada la vía en esa sección, la máquina suelta...
Reivindicaciones:
1. Máquina automática de nivelación y alineación de vía ferroviaria en placa, previas al hormigonado, que comprende:
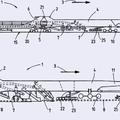
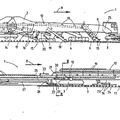
- una estructura (1) constituida por varios cuerpos y un sistema hidráulico y eléctrico que posibilitan sus movimientos y desplazamiento a lo largo de la vía, sobre ruedas ferroviarias u orugas laterales a la vía, tanto para acceder a la sección de vía a posicionar como para retirarse de ella, constituida asimismo por dos elementos de sujeción para agarrar firmemente ambos carriles, una vez situada en dicha sección, manipulando el conjunto de carriles y traviesas-bloques-sujeciones que conforman la vía premontada, manteniéndola en suspensión por los dos carriles (10) y efectuando los movimientos milimétricos necesarios desplazando la vía, levantando para ello cada uno de los carriles hasta la altura necesaria y desplazándolos lateralmente, nivelándola y alineándola hasta situarla en la posición final deseada;
- un sistema de medición, formado por una parte por una serie de sensores de inclinación (11) que proporcionan la posición relativa de la vía en tiempo real, y por otra parte al menos por una estación total (12), de tipo topográfica o GPS, que realiza la adquisición de los datos referentes a la posición absoluta de la vía, determinando en combinación de ambas medidas de forma automática y con extrema precisión la posición real de la vía, en tiempo real;
- un sistema de control, que comprende una serie de equipos electrónicos de control (14), que incluye un software de proceso de los datos de posición de la vía adquiridos por los dispositivos de medición (11-12), comparándolos con los de la posición final teórica, definidos o introducidos previamente, realizando esta operación reiteradamente y en tiempo real, obteniendo como resultado la diferencia entre la posición de la vía final deseada y la posición real en cada instante, a través de la cual determina el movimiento que es necesario que realice la máquina para alcanzar la posición deseada final, transformando estos datos en señales que son transmitidas al sistema hidráulico de la máquina para que éste efectúe los movimientos requeridos.
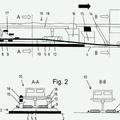
2. Máquina, según la reivindicación 1, caracterizada porque su estructura está constituida por dos cuerpos estructurales (2-3) que tienen un movimiento relativo entre ellos:
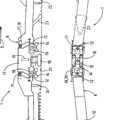
- un cuerpo principal (2) constituido por una estructura metálica que incorpora dos cilindros de elevación (4), a través de los cuales el conjunto vía-máquina se apoya en el suelo, proporcionando al expandirse y comprimirse ambos cilindros la altura de ambos carriles de forma independiente y por lo tanto también el peralte de la vía en esa sección; dichos cilindros presentan en la parte inferior, en contacto con el suelo, una rótula (5) que permite el giro de los mismos, para que al expandirse más un cilindro que otro se incline este cuerpo principal, confiriendo así el peralte a la vía en una sección concreta de la misma; lateralmente incorpora un conjunto de rodillos (6), que permiten el movimiento del cuerpo secundario (3), que es guiado sobre el primero (2), en paralelo y alineado con éste y por lo tanto con el mismo ángulo respecto a la horizontal definido por la apertura de los dos cilindros de elevación (4), mientras que el movimiento de ripado del cuerpo secundario (3) se obtiene gracias a unos cilindros (7) fijados por sus extremos a ambos cuerpos (2-3);
- un segundo cuerpo (3) constituido por una estructura metálica que dispone en ambos lados de sendos pares de ruedas (8), que permiten el desplazamiento de la máquina sobre la vía, y lateralmente de sendas pinzas (9) por medio de las cuales se sujetan firmemente los dos carriles (10) de la vía, fijándolos al cuerpo secundario (3) de la máquina para que se muevan de forma solidaria al mismo, consiguiéndose la posición deseada de los carriles (10) y por lo tanto de la vía mediante la combinación de movimientos de los cilindros de elevación (4) para determinar la altura y el peralte por un lado, y por otro lado de los cilindros de ripado (7) para efectuar su posicionamiento en sentido transversal.
3. Máquina, según la reivindicación 1, caracterizada porque los dispositivos de medición asociados a la misma son al menos de dos tipos:
- un dispositivo (12) que permite conocer la posición absoluta del sistema en el espacio, preferentemente constituido por una estación total topográfica robotizada, o similar, capaz de seguir un prisma en movimiento de manera automática, estando situado dicho prisma (13) en la propia máquina en una posición conocida e invariable, calibrada con respecto al carril cuando está sujeto por las pinzas de la máquina, de forma que, en esa situación, la posición del prisma identifica la posición absoluta del carril o de la propia vía;
- al menos un dispositivo tipo sensor (11), ubicado en la propia máquina, que determina la posición relativa de la vía en cada momento, constituido preferentemente por: sensores de inclinación en sentido transversal que permiten determinar el peralte de la vía, y sensores de inclinación colocados longitudinalmente al plano vertical de la máquina que contiene al eje de la vía en esa posición, que determinan la pendiente que presenta la vía en esa zona.
4. Máquina, según la reivindicación 1, caracterizada por disponer de un sistema de control automático (14), que controla en todo momento los movimientos de la máquina y que está constituido por un PC y/o un PLC, o un equipo alternativo capaz de proporcionar esta misma funcionalidad, así como una serie de dispositivos electrónicos y eléctricos, e incluye:
- un software de proceso, que es capaz de procesar los datos recibidos procedentes del sistema de medida, que definen la posición real instantánea de la vía, comparándolos con la posición final teórica previamente introducida o definida, obteniendo en tiempo real la diferencia entre ambas, obteniendo por tanto tras el tratamiento de los mismos los parámetros de desplazamiento de los puntos del sistema en los tres ejes definidos en el espacio, y los movimientos que deben realizar los cilindros hidráulicos para obtener esa posición, generando señales de salida adecuadas como señales de control para el sistema hidráulico de la máquina;
- unos medios o equipos de comunicaciones con la estación robotizada (12) que envía de forma continua los datos de la coordenadas absolutas de la vía, leyendo para ello el prisma (13) situado y referenciado en la máquina, y con los sensores (11) situados en la máquina, que le comunican de forma continua los datos de medida de las inclinaciones del sistema en los diferentes ejes.
5. Máquina, según la reivindicación 3, caracterizada porque el prisma (13) que sigue la estación topográfica (12) para determinar la posición absoluta de la vía está situado sobre la estructura de la máquina (1), sobre un palpador lateral en contacto permanente con un punto del carril, a través de un elemento tipo muelle, o similar, que asegura el contacto permanente del conjunto con la cara activa del carril, gracias a lo cual el prisma tendrá una posición siempre fija y conocida respecto al carril, para poder deducir la posición del mismo de la lectura del prisma.
Patentes similares o relacionadas:
Procedimiento para la renovación de una vía, del 6 de Junio de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Procedimiento para la renovación de una vía y para la limpieza de un lecho de balasto , caracterizado por las siguientes características: […]
 Procedimiento para la creación de un cuerpo de vía, del 30 de Marzo de 2016, de ZURCHER, RALF: Procedimiento para la creación de un cuerpo de vía de un tramo de ferrocarril cuando inicialmente no hay vía ,
en que el cuerpo de vía consta
de un lecho […]
Procedimiento para la creación de un cuerpo de vía, del 30 de Marzo de 2016, de ZURCHER, RALF: Procedimiento para la creación de un cuerpo de vía de un tramo de ferrocarril cuando inicialmente no hay vía ,
en que el cuerpo de vía consta
de un lecho […]
 Máquina de renovación de una vía férrea, del 20 de Enero de 2016, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Máquina de renovación de una vía férrea con las características siguientes:
a) un bastidor principal está equipado con dispositivos para recoger traviesas […]
Máquina de renovación de una vía férrea, del 20 de Enero de 2016, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Máquina de renovación de una vía férrea con las características siguientes:
a) un bastidor principal está equipado con dispositivos para recoger traviesas […]
Tren de trabajo para el saneamiento de la vía así como de la infraestructura de la vía de un tramo vía, del 12 de Febrero de 2014, de ZURCHER, RALF: Tren de trabajo para el saneamiento de la vía , que está constituida por carriles en forma de carriles longitudinales y traviesas , así […]
 MÁQUINA PARA RENOVAR UNA VÍA FÉRREA, del 17 de Marzo de 2011, de FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H.: Máquina para renovar una vía férrea , que comprende una unidad de transporte de traviesas inferior , que discurre en la dirección longitudinal de la máquina […]
MÁQUINA PARA RENOVAR UNA VÍA FÉRREA, del 17 de Marzo de 2011, de FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H.: Máquina para renovar una vía férrea , que comprende una unidad de transporte de traviesas inferior , que discurre en la dirección longitudinal de la máquina […]
 MAQUINA DE CONSTRUCCION DE VIAS FERREAS, del 9 de Abril de 2010, de FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H.: Máquina de construcción de vías férreas que comprende un bastidor de máquina apoyado sobre primeros mecanismos de rodadura ferroviarios y dotado de dos partes […]
MAQUINA DE CONSTRUCCION DE VIAS FERREAS, del 9 de Abril de 2010, de FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H.: Máquina de construcción de vías férreas que comprende un bastidor de máquina apoyado sobre primeros mecanismos de rodadura ferroviarios y dotado de dos partes […]
MAQUINA DE TENDIDO DE UNA VIA., del 16 de Diciembre de 2006, de FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H.: Máquina de tendido de una vía formada por traviesas y carriles sobre un plano de asentamiento del terreno con instalaciones para […]
APARATO PARA LA UTILIZACION EN LA RENOVACION DE UN SISTEMA DE VIA FERREA., del 1 de Diciembre de 2006, de GSG KNAPE GLEISSANIERUNG GMBH: Aparato para la utilización en la renovación de un sistema de vía férrea con una infraestructura y una superestructura cuando la vía […]