Procedimiento de liberación para la activación de una estimación de la velocidad lateral para dispositivos de protección de ocupantes de un vehículo.
Procedimiento de liberación para la activación de una estimación de la velocidad lateral (80) para dispositivos de protección de ocupantes de un vehículo,
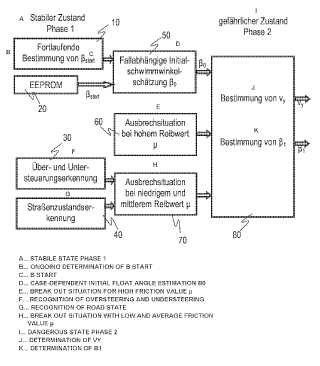
en el que se detecta y se evalúan una o varias variables dinámicas de la marcha (LW, vx, wz, ay), en el que sobre la base de las variables dinámicas de la marcha (LW, vx, wz, ay) detectadas se realiza un proceso de detección de sobreviraje y de subviraje (30), que se evalúa para la activación de la estimación de la velocidad lateral (80), caracterizado porque adicionalmente se realiza y se evalúa un proceso de detección del estado de la carretera (40), para activar la estimación de la velocidad lateral (80).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2005/057060.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: SCHMID, MICHAEL, LICH,THOMAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R21/01 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › Circuitos eléctricos para activar dispositivos de seguridad en el vehículo en caso de accidente o de ser éste inminente.
PDF original: ES-2379091_T3.pdf
Fragmento de la descripción:
Procedimiento de liberación para la activación de una estimación de la velocidad lateral para dispositivos de protección de ocupantes de un vehículo Estado de la técnica La invención parte de un procedimiento de liberación para la activación de una estimación de la velocidad lateral para dispositivos de protección de ocupantes de un vehículo de acuerdo con el tipo de la reivindicación independiente 1 de la patente.
Se conocen a partir del documento US 2003/0229438 A1 un procedimiento y un medio utilizable en un ordenador, en particular un programa de ordenador, para el control de la estabilidad del vehículo. Se determina un coeficiente de resistencia a la marcha inclinada para un eje trasero. Se determina un primer coeficiente de subviraje. Se determina una aceleración transversal deseada sobre la base del coeficiente de subviraje. Se determina un segundo coeficiente de subviraje sobre la base de una variable limitada para la aceleración transversal deseada. Se determina una tasa de guiñada deseada sobre la base del segundo coeficiente de subviraje. Se determina una velocidad transversal deseada sobre la base de la tasa de guiñada y el coeficiente de resistencia a la marcha inclinada para el eje trasero.
Los números conocidos en los Estados Unidos justifican la importancia de la seguridad pasiva en vuelcos de automóviles. En el año 1998, la mitad de todos los accidentes de vehículos individuales mortales sobre atribuibles a un vuelco. En todo el evento de accidente, el vuelco del vehículo representa un porcentaje del 20 por ciento.
Los sistemas convencionales para la detección del vuelco consideraban el movimiento oscilante y las aceleraciones en dirección-x, en dirección-y y en dirección-z. Sobre esta b ase es posible una detección segura de un vuelvo de un vehículo, tomando con seguridad la decisión de si existe un vuelvo, sin embargo, solamente en un instante posterior. En determinados casos de vuelcos de vehículos, que presuponen una maniobra dinámica de la marcha, el ocupante del vehículo experimenta altas aceleraciones laterales. Tales maniobras pueden conducir, por ejemplo, a los llamados vuelcos ‘soil trip'. A este respecto, existe con respecto al potencial de liberación todavía potencial para futuros sistemas de protección de los ocupantes de un vehículo.
Los procedimientos conocidos se basan, por ejemplo, en la evaluación de un sensor de las tasas de giro y dos sensores de aceleración, que están integrados en un aparato de control central de airbag. El sensor de las tasas de giro calcula de acuerdo con el principio centrífugo la velocidad de rotación alrededor del eje longitudinal del vehículo y los sensores de aceleración miden adicionalmente la aceleración del vehículo en dirección transversal y en dirección vertical. En el algoritmo principal se evalúa entonces la tasa de giro. Con los valores de medición de los sensores de aceleración se puede detectar, por una parte, el tipo de vuelco y, por otra parte, estos valores valen para la verificación de la factibilidad. Si el algoritmo de las tasas de giro detecta un vuelco, se activan los dispositivos de seguridad solamente con liberación simultánea a través del control de factibilidad.
En otro procedimiento conocido, se posibilita una decisión de liberación oportuna en caso de vuelcos con alta aceleración local porque se incorporan un ángulo de flotación y la velocidad lateral del vehículo. En un procedimiento conocido para la detección ampliada de exceso de velocidad, a partir de una tasa de guiñada y de la velocidad del vehículo en dirección longitudinal teniendo en cuenta la aceleración lateral, se realiza una estimación de la velocidad lateral, que representa, en el caso de desviación lateral en las franjas verdes una medida de la probabilidad de exceso de velocidad del vehículo. Para la determinación de la velocidad lateral se utiliza de la misma manera el llamado ángulo de flotación.
La determinación del ángulo de flotación en intervalos angulares mayores y la estimación de la velocidad lateral sobre la base del ángulo de flotación determinado, como se necesitan para la detección del vuelco no se pueden realizar, sin embargo, a través de los procedimientos conocidos, que se emplean, por ejemplo, en la regulación de la dinámica de la marcha. Puesto que éstos solamente son adecuados para intervalos angulares inferiores a 10º . La zona de validez reducida se debe a que no se puede realizar ya con éxito una regulación de la dinámica de la marcha con ángulos de flotación más elevados.
Ventajas de la invención El procedimiento de liberación de acuerdo con la invención para la activación de una estimación de la velocidad lateral para dispositivos de protección de ocupantes de un vehículo con las características de la reivindicación independiente de la patente tiene, en cambio, la ventaja de que se detectan vuelcos del vehículo ya en un instante precoz. De esta manera se garantiza que se activen de manera oportuna dispositivos de seguridad como tensores de cinturón, airbag de cabeza y estribo de exceso de velocidad y de esta manera se reduce el riesgo de lesión. De manera ventajosa, el procedimiento de liberación de acuerdo con la invención posibilita a través de la detección del estado de la carretera y una detección de sobreviraje y de subviraje, que se realizan en cada caso con la ayuda de variables dinámicas de la marcha, una activación segura del estimador de la velocidad lateral para todas las superficies de carretera. Esto indica relaciones de la carretera tanto afectadas con bajo coeficiente de fricción como también con alto coeficiente de fricción. De esta manera, se eleva la robustez del algoritmo en el sistema general, puesto que a través del procedimiento de liberación de acuerdo con la invención se reduce la probabilidad de liberaciones erróneas.
Por lo demás, la información sobre una situación de rotura del vehículo se puede poner a la disposición de otros sistemas de retención, de manera que, por ejemplo, en el caso de un movimiento lateral del vehículo y choque lateral siguiente, ésta información se puede utilizar en el procedimiento de liberación del algoritmo lateral.
A través de las medidas y desarrollos indicados en las reivindicaciones dependientes son posibles mejoras ventajosas del procedimiento de liberación indicado en la reivindicación independiente de la patente para la activación de una estimación de la velocidad lateral.
Es especialmente ventajoso que durante el proceso de detección de sobreviraje y de subviraje, a partir de un ángulo de dirección actual, de una velocidad longitudinal actual y de un estado predeterminado de las ruedas del vehículo e calcule una tasa de guiñada teórica de Ackermann, que se puede comparar para la detección de una maniobra de sobreviraje o bien de una maniobra de subviraje con una tasa de guiñada actual medida.
Además, es ventajoso que durante el proceso de detección de sobreviraje y de subviraje se calcule una modificación del ángulo de flotación a partir de una aceleración lateral, de una velocidad longitudinal y de una tasa de guiñada medida. De esta manera, se puede reducir el riesgo de detecciones erróneas de maniobras de sobreviraje y de subviraje.
La modificación del ángulo de flotación se calcula partiendo de un ángulo de flotación inicial, que se determina con preferencia de forma continua por medio de una integración de larga duración.
Además, es ventajoso que para la generación de una señal indicadora de sobreviraje y de subviraje durante el proceso de detección de sobreviraje y de subviraje se combinen entre sí la tasa de guiñada de Ackermann, la modificación del ángulo de flotación y la tasa de guiñada medida actual a través de un primer circuito lógico y se evalúen. El primer circuito lógico coloca la señal indicadora de sobreviraje y de subviraje, cuando se calcula durante la evaluación un sobreviraje y un subviraje del vehículo. De esta manera, se reduce adicionalmente el riesgo de detecciones erróneas de maniobras de sobreviraje y de subviraje. Además, la señal de sobreviraje y de subviraje se puede poner a la disposición de otros sistemas de retención.
La tasa de guiñada actual se puede medir, por ejemplo, con un sensor de tasas de guiñada y/o con dos sensores de aceleración lineal y/o con un sensor dispuesto en el centro de gravedad, que mide una aceleración lineal en al menos dos ejes espaciales.
Además, es ventajoso que durante el proceso de detección del estado de la carretera se calcule una aceleración... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de liberación para la activación de una estimación de la velocidad lateral (80) para dispositivos de protección de ocupantes de un vehículo, en el que se detecta y se evalúan una o varias variables dinámicas de la marcha (LW, vx, ωz, ay) , en el que sobre la base de las variables dinámicas de la marcha (LW, vx, ωz, ay) detectadas se realiza un proceso de detección de sobreviraje y de subviraje (30) , que se evalúa para la activación de la estimación de la velocidad lateral (80) , caracterizado porque adicionalmente se realiza y se evalúa un proceso de detección del estado de la carretera (40) , para activar la estimación de la velocidad lateral (80) .
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque durante el proceso de detección de sobreviraje y de subviraje (30) se calcula una tasa de guiñada de Ackermann (ωza) a partir de un ángulo de dirección (LW) actual, una velocidad longitudinal (vx) actual y un estado predeterminado de las ruedas del vehículo.
3. Procedimiento de acuerdo con la reivindicación 1 ó 2, caracterizado porque durante el proceso de detección de sobreviraje y de subviraje (30) se calcula una modificación del ángulo de flotación (βpunkt) a partir de una aceleración lateral (ay) , de una velocidad longitudinal (vx) y de una tasa de guiñada (ωz) medida.
4. Procedimiento de acuerdo con la reivindicación 3, caracterizado porque la modificación del ángulo de flotación (βpunkt) se calcula partiendo de un ángulo de flotación inicial (βStart) , que se determina con preferencia de forma continua por medio de una integración de larga duración.
5. Procedimiento de acuerdo con la reivindicación 3 ó 4, caracterizado porque para la generación de una señal indicadora de sobreviraje y de subviraje (140) durante el proceso de detección de sobreviraje y de subviraje (30) se combinan entre sí la tasa de guiñada de Ackermann (ωza) , la modificación del ángulo de flotación (βpunkt) y la tasa de guiñada medida actual (ωz) a través de un primer circuito lógico (130) y se evalúan, de manera que el primer circuito lógico (130) coloca la señal indicadora de sobreviraje y de subviraje (140) , cuando se calcula durante la evaluación un sobreviraje y un subviraje del vehículo.
6. Procedimiento de acuerdo con una de las reivindicaciones 1 a 5, caracterizado porque la tasa de guiñada actual (ωz) se mide con un sensor de tasas de guiñada y/o con dos sensores de aceleración lineal y/o con un sensor dispuesto en el centro de gravedad, que mide una aceleración lineal en al menos dos ejes espaciales.
7. Procedimiento de acuerdo con una de las reivindicaciones 1 a 6, caracterizado porque durante el proceso de detección del estado de la carretera (40) se calcula una aceleración lateral teórica (ayTheo) a partir de la tasa de guiñada (ωz) medida actual y la velocidad longitudinal (vx) .
8. Procedimiento de acuerdo con la reivindicación 7, caracterizado porque para la generación de una señal indicadora-μ-baja (220) durante el proceso de detección del estado de la carretera (40) se combinan entre sí la aceleración lateral teórica (αyTheo) , la aceleración lateral (ay) medida actual y el indicador de sobreviraje y de subviraje (140) a través de un segundo circuito lógico (210) y se evalúan.
9. Procedimiento de acuerdo con la reivindicación 8, caracterizado porque el segundo circuito lógico (210) coloca la señal indicadora-μ- baja (220) cuando durante la evaluación se calcula un coeficiente de fricción bajo o medio (μ) para la carretera sobre la que se circula.
10. Procedimiento de acuerdo con una de las reivindicaciones 1 a 9, caracterizado porque para la activación de la estimación de la velocidad lateral (80) se combinan entre sí la señal indicadora-μ-baja (220) del proceso de detección del estado de la carretera (40) , la señal indicadora de sobreviraje y de subviraje (140) del proceso de detección de sobreviraje y de subviraje (30) , la tasa de guiñada (ωz) medida actual, la aceleración lateral medida (ay) y la modificación del ángulo de flotación (βpunkt) calculado a través de un tercer circuito lógico (300) y se evalúan, de manera que se activa la estimación de la velocidad lateral (80) , cuando durante la evaluación se calcula una situación de derrape con un coeficiente de fricción bajo y/o medio.
Patentes similares o relacionadas:
DISPOSITIVO ELECTRÓNICO DE SEGURIDAD, del 20 de Marzo de 2020, de PETRONICS TECNOLOGIA S.L: Dispositivo electrónico de seguridad independiente del vehículo apto para ser fijado al vehículo que comprende una cámara de video que grava en continuo […]
 Sensor de accidentes, del 29 de Mayo de 2019, de ROBERT BOSCH GMBH: Vehículo con una pared y un sensor de accidentes con medios de fijación a un vehículo; en donde los medios […]
Sensor de accidentes, del 29 de Mayo de 2019, de ROBERT BOSCH GMBH: Vehículo con una pared y un sensor de accidentes con medios de fijación a un vehículo; en donde los medios […]
Método y dispositivo para impedir o disminuir el riesgo de una lesión en los ocupantes de un vehículo en el caso de una colisión por alcance, del 15 de Mayo de 2019, de Hochschule Kaiserslautern University of Applied Sciences: Método para evitar o disminuir el riesgo de lesión para los ocupantes de un vehículo en el caso de una colisión por alcance con los siguientes pasos de método: […]
Sistema automático de ayuda a la evacuación de los ocupantes de un automóvil caído al agua, del 26 de Noviembre de 2018, de UNIVERSIDAD DE CADIZ: Sistema automático de ayuda a la evacuación de los ocupantes de un automóvil caldo al agua. La presente invención facilita la evacuación de un […]
CONJUNTO DE PREVENCIÓN DE ACCIDENTES, del 11 de Octubre de 2018, de PÉREZ DEL MONTE, Ángel: 1. Conjunto de prevención de accidentes, caracterizado porque comprende un emisor de luz que se encuentra en conexión con un pulsador de activación integrado en […]
Sistema de supervisión mediante visión artificial para menores que viajan en sistemas de retención infantil, del 3 de Octubre de 2018, de UNIVERSIDAD DE ALCALA.: El sistema de supervisión mediante visión artificial para menores que viajan en sistemas de retención infantil, hace referencia a una invención basada en técnicas […]
Método y aparato para controlar un dispositivo de seguridad accionable, del 5 de Julio de 2017, de TRW AUTOMOTIVE U.S. LLC: Un método para determinar una condición de colisión de un vehículo incluyendo los pasos de: detectar la aceleración de colisión en una primera dirección […]
Procedimiento para hacer funcionar un sistema de protección de peatones, del 24 de Mayo de 2017, de AUDI AG: Procedimiento para hacer funcionar un sistema de protección de peatones para reducir la gravedad en accidentes en caso de colisiones frontales […]