Dispositivo de grapado quirúrgico motorizado neumáticamente.
Una grapadora quirúrgica (10) que tiene un extremo distal sobre el cual un conjunto de herramientas (100) que tiene un par de superficies opuestas de acoplo del tejido (110,
120) puede montarse para deformar una pluralidad de grapas quirúrgicas (350) a través del tejido fijado, en donde la grapadora quirúrgica comprende: un armazón (512) que tiene un asa fija (565); y un asa de amordazamiento (560) montada en el mencionado armazón movible selectivamente con respecto a la mencionada asa fijada desde una primera posición en una relación de separación con respecto a la mencionada asa fija hacia una segunda posición más cercana a la mencionada asa fija para accionar el amordazamiento del tejido; caracterizada porque tiene un yugo adaptador (595) el cual se traslada dentro del mencionado armazón con la actuación de la mencionada asa de amordazamiento, en donde el mencionado yugo coopera mecánicamente con un husillo de avance (555) para trasladar el husillo de avance y por tanto accionar el conjunto de herramientas para amordazar el tejido; y un conjunto motriz (520) que incluye un eje (521), en donde el mencionado eje está acoplado mecánicamente con el mencionado husillo de avance, tal que con la activación selectiva del mencionado conjunto motriz, el mencionado eje gira el mencionado husillo de avance para avanzar una tuerca de rodadura (575) distalmente a través del mencionado husillo de avance para forzar un pistón de disparo (578) en un conjunto de herramientas al montarse sobre el armazón para deformar las grapas quirúrgicas a través y con fijación del tejido.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2003/031651.
Solicitante: TYCO HEALTHCARE GROUP LP.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: Mail Stop: 8 N-1 555 Long Wharf Drive New Haven, CT 06511 ESTADOS UNIDOS DE AMERICA.
Inventor/es: Roy,Philip C. .
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00).
- A61B17/068 A61B […] › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Grapadoras quirúrgicas (para realizar anastomosis A61B 17/115).
- A61B17/072 A61B 17/00 […] › para aplicar una hilera de grapas en una sola operación.
PDF original: ES-2379348_T3.pdf
Fragmento de la descripción:
Dispositivo de grapado quirúrgico motorizado neumáticamente.
ANTECEDENTES
Campo técnico La presente exposición está relacionada con las grapadoras quirúrgicas para implantar grapas quirúrgicas mecánicas dentro del tejido de un paciente, y en particular grapas que estén motorizadas mecánicamente para poder disparar grapas quirúrgicas dentro del tejido.
Antecedentes de la técnica relacionada Las grapadoras quirúrgicas que implantan grapas quirúrgicas dentro del tejido utilizando la fuerza de un gas presurizado son conocidas en la técnica. La mayoría de estos instrumentos utilizan un suministro de aire presurizado que se conecta con un mecanismo de disparo, por medio de una serie compleja de mangueras y actuadores. El mecanismo de disparo, al ser presionado, sencillamente libera un gas presurizado para poder implantar una grapa dentro del tejido.
El documento US-A-5667517 expone una grapadora quirúrgica que tiene una porción de yunque, una porción de cartucho de grapas que contiene una pluralidad de grapas quirúrgicas, y un motor de corriente continua (CC) . El instrumento incluye un tornillo deslizante de avance que soporta una tuerca de cierre y una tuerca de disparo. El movimiento de la tuerca de cierre aproxima el cartucho y el yunque y desplaza también la tuerca de disparo para poder disparar las grapas.
Una grapadora quirúrgica adicional es la mostrada en el documento US-A-5647526, la cual es la base del formato de dos partes de la reivindicación 1 expuesta más adelante.
Los dispositivos conocidos actuales pueden requerir típicamente 4, 45 a 27, 2 kg de fuerza manual para amordazar el tejido y deformar las grapas quirúrgicas a través del tejido, lo cual con el uso repetido podría provocar fatiga.
Seria deseable el proporcionar un motor neumático de bajo costo o bien un reciprocador que se acople a un suministro de gas presurizado (dispuesto bien interna o externamente con respecto a la grapadora quirúrgica) y que proporcione la energía necesaria para hacer disparar el instrumento para formar una serie de grapas quirúrgicas dentro y a través del tejido. Serie también deseable el proporcionar una grapadora quirúrgica avanzada ergonómicamente, que reduzca la fatiga durante el uso repetido, y que proporcione al cirujano una realimentación táctil durante la activación de la grapadora.
SUMARIO
La invención está definida en la reivindicación independiente descrita más adelante. Las reivindicaciones dependientes están dirigidas a las características opcionales y a las realizaciones preferidas.
La presente exposición está relacionada con una grapadora quirúrgica que tiene un extremo distal sobre el cual un conjunto de herramientas que tiene un par de superficies de acoplo al tejido opuestas que pueden estar montadas para deformar una pluralidad de grapas quirúrgicas a través del tejido para fijar el tejido. La grapadora incluye un armazón que tiene un asa fija que se extiende desde el mismo.
Un asa de amordazamiento se encuentra montada al armazón y es movible selectivamente en una relación de separación con respecto al asa fija hacia una segunda posición más cercana al asa fija para accionar la fijación del tejido. Se incluye un yugo adaptador el cual se traslada dentro del armazón con la actuación asa de amordazado. El yugo adaptador coopera mecánicamente con un husillo deslizante de avance para accionar el conjunto de herramientas para amordazar el tejido. La grapadora incluye también un conjunto motriz que tiene un eje que está acoplado mecánicamente con el husillo deslizante de avance. Con la activación selectiva del conjunto motriz, el eje gira el husillo de avance para hacer desplazar una tuerca de rodadura distalmente a lo largo del husillo de avance para forzar un pistón de disparo en el conjunto de herramientas al montarse sobre el armazón para deformar las grapas quirúrgicas a través del tejido para fijar el tejido.
Preferiblemente, el conjunto motriz está motorizado neumáticamente, e incluye un gatillo de disparo sensible a la presión, el cual es variable selectivamente para regular el avance de la tuerca de rodadura a lo largo del husillo de avance, que a su vez regula la velocidad a la cual se deforman las grapas quirúrgicas. Ventajosamente, la grapadora incluye al menos un dispositivo de seguridad que previene la activación del conjunto motriz hasta que se desactive la seguridad. En una realización, la seguridad se desactiva automáticamente cuando el asa de amordazado se mueve a la segunda posición para amordazar el tejido. Preferiblemente, una de las seguridades es una seguridad de disparo que previene que la tuerca de rodadura pueda avanzar para forzar el pistón de disparo hasta que se desactive la seguridad de disparo.
En otra realización, el eje gira con la activación del conjunto motriz que a su vez gira el husillo de avance. Preferiblemente, la grapadora incluye un conmutador para invertir la rotación del eje del conjunto motriz con la activación del mismo.
La presente exposición está relacionada también con una grapadora que tiene un armazón con un miembro alargado fijado y un conjunto de herramientas que está fijado al extremo distal del miembro alargado. El conjunto de herramientas incluye unas superficies de acoplo al tejido opuestas, y una pluralidad de grapas quirúrgicas. La grapadora incluye también un conjunto motriz activable selectivamente que tiene un eje de accionamiento que está acoplado mecánicamente con un husillo de avance. Con la activación selectiva del conjunto motriz, el eje de accionamiento hace girar el husillo de avance para hacer avanzar un eje de disparo y accionado el conjunto de herramientas para amordazar inicialmente el tejido entre las superficies opuestas de acoplo del tejido del conjunto de herramientas y subsiguientemente forzar un pistón de disparo en el conjunto de herramientas para deformar las grapas quirúrgicas a través del tejido para fijar el mismo.
En una realización, el eje de accionamiento realiza un movimiento de reciprocidad con la activación del conjunto motriz. El eje de accionamiento, a su vez, está acoplado mecánicamente con un convertidor, el cual convierte el movimiento recíproco del eje de accionamiento en un movimiento rotativo del husillo de avance.
Incluso en otra realización, la grapadora incluye un cartucho metálico que contiene un suministro de gas presurizado para la activación del conjunto motriz. Preferiblemente, el cartucho está internamente dispuesto dentro del armazón. Ventajosamente, el cartucho es reemplazable selectivamente.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
Se describen aquí varias realizaciones del instrumento sujeto con referencia a los dibujos, en donde:
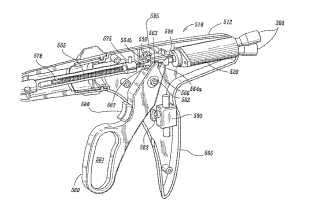
La figura 1A es una vista lateral esquemática con porciones fragmentadas de una grapadora quirúrgica que tiene un conjunto motriz rotatorio motorizado neumáticamente para la formación de las grapas; La figura 1B es una vista lateral esquemática con porciones fragmentadas de una realización alternativa de un conjunto de herramientas para su uso con la grapadora de la figura 1A; La figura 2 es una vista lateral esquemática con porciones fragmentadas de una realización alternativa de una grapadora quirúrgica motorizada neumaticamente que tiene un cartucho reutilizable externamente a la misma; La figura 3 es una vista lateral esquemática con porciones fragmentadas de una grapadora quirúrgica que tiene un conjunto motriz recíproco motorizada neumaticamente para la formación de las grapas; La figura 4 es una vista lateral esquemática con porciones fragmentadas de una grapadora quirúrgica que tiene un conjunto motriz recíproco motorizado recíprocamente para formar las grapas y un cartucho dispuesto internamente. La figura 5A es una vista lateral en perspectiva y unas porciones fragmentadas de otra realización que muestra un asa de fijación manual para amordazar el tejido en una posición de pre-amordazado y un disparador neumático que se muestra desacoplado de una válvula de seguridad para hacer disparar la grapadora; La figura 5B es una vista lateral en perspectiva de la realización de la figura 5A, que muestra el asa de amordazado en una posición amordazada y un disparador neumático en una posición acoplada con una válvula de seguridad para activar el motor neumático y hacer disparar las grapas; y La figura 6 es una vista fragmentada esquemática de un yugo adaptador que conecta con el conjunto motriz.
DESCRIPCIÓN DETALLADA
Con referencia... [Seguir leyendo]
Reivindicaciones:
1. Una grapadora quirúrgica (10) que tiene un extremo distal sobre el cual un conjunto de herramientas (100) que tiene un par de superficies opuestas de acoplo del tejido (110, 120) puede montarse para deformar una pluralidad de grapas quirúrgicas (350) a través del tejido fijado, en donde la grapadora quirúrgica comprende:
un armazón (512) que tiene un asa fija (565) ; y un asa de amordazamiento (560) montada en el mencionado armazón movible selectivamente con respecto a la mencionada asa fijada desde una primera posición en una relación de separación con respecto a la mencionada asa fija hacia una segunda posición más cercana a la mencionada asa fija para accionar el amordazamiento del tejido; caracterizada porque tiene un yugo adaptador (595) el cual se traslada dentro del mencionado armazón con la actuación de la mencionada asa de amordazamiento, en donde el mencionado yugo coopera mecánicamente con un husillo de avance (555) para trasladar el husillo de avance y por tanto accionar el conjunto de herramientas para amordazar el tejido; y un conjunto motriz (520) que incluye un eje (521) , en donde el mencionado eje está acoplado mecánicamente con el mencionado husillo de avance, tal que con la activación selectiva del mencionado conjunto motriz, el mencionado eje gira el mencionado husillo de avance para avanzar una tuerca de rodadura (575) distalmente a través del mencionado husillo de avance para forzar un pistón de disparo (578) en un conjunto de herramientas al montarse sobre el armazón para deformar las grapas quirúrgicas a través y con fijación del tejido.
2. Una grapadora quirúrgica de acuerdo con la reivindicación 1, en donde el mencionado conjunto motriz está asistido neumáticamente.
3. Una grapadora quirúrgica de acuerdo con cualquier reivindicación anterior, en donde el mencionado conjunto motriz es variable selectivamente, para regular el avance de la mencionada tuerca de rodadura a lo largo del mencionado husillo de avance, el cual a su vez regula la velocidad a la cual se deforman las grapas quirúrgicas mencionadas.
4. Una grapadora quirúrgica de acuerdo con cualquier reivindicación anterior, en donde la mencionada grapadora comprende además un disparador (580) sensible a la presión, el cual regula el avance de la mencionada tuerca de rodadura a lo largo del mencionado husillo de rodadura a lo largo del mencionado husillo de avance, el cual a su vez regula la velocidad a la cual se deforma las mencionadas grapas quirúrgicas.
5. Una grapadora quirúrgica de acuerdo con cualquier reivindicación anterior, en donde la mencionada grapadora incluye al menos una seguridad (582) que prevenga la activación del mencionado conjunto motriz hasta que dicha seguridad se desactive.
6. Una grapadora quirúrgica de acuerdo con cualquier reivindicación, en donde la mencionada al menos una seguridad se desactiva automáticamente cuando la mencionada asa de amordazado se mueva a la mencionada segunda posición para amordazar el tejido.
7. Una grapadora quirúrgica de acuerdo con cualquier reivindicación anterior, en donde la mencionada tuerca de rodadura incluye una seguridad de disparo (576) , la cual prevenga que la mencionada tuerca de rodadura pueda avanzar para forzar el mencionado pistón de disparo hasta que la mencionada seguridad de disparo se desactive.
8. Una grapadora quirúrgica de acuerdo con cualquier reivindicación anterior, en donde la mencionada grapadora incluye un conmutador (50) para invertir la rotación del mencionado eje del mencionado conjunto motriz con la activación del mismo.
9. Una grapadora quirúrgica de acuerdo con cualquier reivindicación anterior, en donde el mencionado eje gira con la activación del mencionado conjunto motriz, el cual a su vez hace girar el mencionado husillo de avance.
10. Una grapadora quirúrgica según lo reivindicado en cualquiera de las reivindicaciones anteriores, y que comprende:
un miembro alargado fijado al mencionado armazón; en donde el mencionado conjunto de herramientas está fijado al extremo distal del miembro alargado e incluyendo un conjunto de yunque y un conjunto de cartucho, teniendo cada uno una de las mencionadas superficies de acoplo del tejido, en donde el mencionado conjunto del cartucho incluye la pluralidad de las grapas quirúrgicas.
11. Una grapadora quirúrgica de acuerdo con la reivindicación 10, en donde el mencionado eje de accionamiento realiza el movimiento recíproco con la activación del mencionado conjunto motriz, en donde el mencionado eje de accionamiento está acoplado mecánicamente con un convertidor, el cual convierte el movimiento recíproco del mencionado eje de accionamiento en un movimiento rotatorio del mencionado husillo de avance.
12. Una grapadora quirúrgica de acuerdo con la reivindicación 10, en donde el mencionado eje de accionamiento gira con la activación del mencionado conjunto motriz, el cual a su vez hace girar el mencionado husillo de avance.
13. Una grapadora quirúrgica de acuerdo con la reivindicación 2, o bien una cualquiera de las reivindicaciones 3 a
12, como dependiente en la reivindicación 2, en donde la mencionada grapadora comprende un cartucho (250) para contener un suministro de gas presurizado para la activación del mencionado conjunto motriz, en donde el mencionado cartucho está dispuesto internamente dentro del mencionado armazón.
14. Una grapadora quirúrgica de acuerdo con la reivindicaron 13, en donde el mencionado cartucho es 10 reemplazable selectivamente.
15. Una grapadora quirúrgica de acuerdo con la reivindicación 10 o cualquier otra de las reivindicaciones 11 a 14 según lo dependiente de la reivindicación 10, en donde el mencionado miembro alargado y el mencionado conjunto de herramientas están configurados para un uso endoscópico.
16. Una grapadora quirúrgica de acuerdo con cualquier reivindicación anterior, en donde la grapadora quirúrgica es la adecuada para la operación con una mano.
Patentes similares o relacionadas:
Aplicadores que tienen sujetadores implantables para braquiterapia, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aplicador de sujetadores que comprende: una porción de cuerpo que incluye un conjunto de mango ; un conjunto […]
Mecanismo de suministro y bloqueo de elemento de fijación quirúrgico, del 1 de Julio de 2020, de Via Surgical Ltd: Un dispositivo para suministrar una pluralidad de elementos de fijación quirúrgicos , uno a la vez, en el tejido de un paciente, comprendiendo el dispositivo: […]
Instrumentos quirúrgicos articulados, del 10 de Junio de 2020, de C.R. BARD, INC.: Un instrumento quirúrgico que comprende: un mango ; y un conjunto de eje alargado que se extiende distalmente desde el mango , […]
Grapadora circular y componente de grapa de la misma, del 3 de Junio de 2020, de Touchstone International Medical Science Co., Ltd: Un conjunto de cabezal de grapas que comprende: un cartucho anular de grapas que comprende una pluralidad de agujeros de grapas en una cara de extremo del […]
Dispositivo de grapado quirúrgico con deflexión controlada de la viga, del 15 de Abril de 2020, de Covidien LP (100.0%): Un dispositivo de grapado quirúrgico , que comprende: una sección media de yunque que define un eje longitudinal y una superficie de contacto con el tejido […]
Injerto de endoprótesis con elementos de fijación y sistema de introducción, del 1 de Abril de 2020, de JOTEC GMBH: Injerto de endoprótesis para la introducción en un vaso sanguíneo de un paciente, con un cuerpo cilíndrico hueco con un lado de […]
Procedimiento y sistema para proporcionar recomendaciones para la ejecución óptima de procedimientos quirúrgicos, del 25 de Marzo de 2020, de CHILDREN'S NATIONAL MEDICAL CENTER: Un procedimiento para proporcionar información para un procedimiento médico quirúrgico, comprendiendo el procedimiento: adquirir, usando circuitería, […]
Instrumento quirúrgico con unidad de carga reemplazable, del 11 de Diciembre de 2019, de Covidien LP (100.0%): Un instrumento quirúrgico , que comprende: un alojamiento alargado que tiene un extremo proximal y un extremo distal; una […]