Dispositivo para determinar un momento de contacto de un vehículo con un objeto de colisión.
Procedimiento para determinar un momento de contacto de un vehículo con un objeto de colisión,
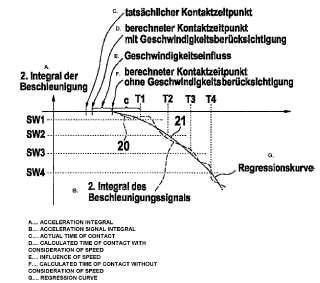
caracterizado porque el momento de contacto se determina mediante una aproximación de una señal (20) derivada de una señal de aceleración (10) con una función (21), en donde a partir de la función (21) se calcula retroactivamente el momento de contacto, de tal modo que se determina el punto cero.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2004/001612.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: THEISEN, MARC.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R21/01 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › Circuitos eléctricos para activar dispositivos de seguridad en el vehículo en caso de accidente o de ser éste inminente.
- B60R21/0132 B60R 21/00 […] › en respuesta a parámetros sobre el movimiento del vehículo.
PDF original: ES-2381549_T3.pdf
Fragmento de la descripción:
Dispositivo para determinar un momento de contacto de un vehículo con un objeto de colisión
Estado de la técnica
La invención se basa en un dispositivo para determinar un momento de contacto de un vehículo con un objeto de colisión, según el género de la reivindicación independiente.
Del documento DE 100 65 518 A1 se conoce ya determinar el momento de contacto de un vehículo con un objeto de colisión, con base en una señal de un sistema sensorial pre-colisión.
Del documento WO 03/042007 A1 se conoce determinar de tal modo el inicio de una colisión, que una integral alcance un valor umbral prefijado.
Ventajas de la invención El dispositivo conforme a la invención para determinar un momento de contacto de un vehículo con un objeto de colisión con las particularidades de la reivindicación independiente tiene la ventaja, frente a esto, de que el momento de contacto puede determinarse con precisión solamente con base en una señal de aceleración. Esta determinación exacta se consigue mediante una aproximación de la señal, que se deriva de la señal de aceleración. La aproximación conduce a una función a partir de la cual después puede calcularse el punto de contacto, de tal modo que se determine el punto cero. Debido a que en el caso de un sistema de protección de personas se dispone de un sensor de aceleración al menos en el aparato de control central, siempre está presente la señal de aceleración. De este modo no se necesita ningún sistema sensorial adicional para determinar con exactitud el momento de contacto. Como función para la aproximación de la señal puede utilizarse por ejemplo una función cuadrática. La función cuadrática se muestra especialmente apropiada en cuanto a precisión y complejidad. Sin embargo también son posibles aquí otras funciones que presenten porcentajes con potencias superiores o fraccionarias, o por ejemplo porcentajes de función trascendentes. La determinación muy precisa del momento de contacto es una premisa para una activación precisa en el tiempo de medios de protección de personas como airbags, atirantadores de cinturón y barras antivuelco. Pero también para la protección de peatones es un parámetro importante la determinación del momento exacto. De este modo el dispositivo conforme a la invención conduce por lo tanto a una mayor seguridad de los ocupantes del vehículo. Si a pesar de ello se utiliza un sistema sensorial del entorno para determinar el momento de contacto o para predecir el momento de contacto, el dispositivo conforme a la invención puede utilizarse para hacer plausible esta predicción o para, dado el caso, determinar una diferencia que después pueda usarse por separado para corregir los valores predichos del sistema sensorial del entorno, por ejemplo la velocidad de colisión.
Mediante las medidas y los perfeccionamientos mencionados en las reivindicaciones subordinadas son posibles mejoras ventajosas del dispositivo conforme a la invención para determinar un momento de contacto de un vehículo con un objeto de colisión.
Es especialmente ventajoso que el dispositivo para generar la señal filtre la señal de aceleración o la integre una o dos veces. Estas medidas son necesarias para obtener una función de baja frecuencia. La señal de aceleración por sí sola contiene por ejemplo demasiados porcentajes de alta frecuencia, que dificultan mucho una aproximación mediante una función, en especial en cuanto a las determinaciones del momento de contacto. Por ello es o bien necesario un filtrado intenso o una integración simple o doble, que tienen también una acción de filtrado. Para la utilización de la integración doble puede llevarse a cabo por ejemplo una aproximación mediante una función cuadrática. A partir de la posición del punto culminante de la función cuadrática puede calcularse después retroactivamente el momento de contacto. De este modo se obtiene un problema de regresión lineal que se resuelve de forma sencilla. Para el filtrado pueden utilizarse en especial filtros paso bajo de primer orden o superior.
Asimismo es ventajoso que el dispositivo para la determinación del momento de contacto tenga en cuenta adicionalmente una velocidad de colisión. Esto es ventajoso, ya que cuanto mayor sea la velocidad de colisión más rápidamente se verán afectadas estructuras más duras en el vehículo, de tal modo que al tenerse en cuenta al momento de contacto se mejora la determinación del momento de contacto. Por lo tanto transcurre cierto periodo de tiempo en función de la velocidad entre el contacto real y el momento definido por el punto culminante de la parábola. Se consigue por lo tanto una mejora si del momento definido por el punto culminante de la parábola se resta un periodo de tiempo en función de la velocidad. Un posible planteamiento para calcular este periodo de tiempo es una función lineal en función de la velocidad con la forma f (cv) = a*cv+b, en donde a y b son parámetros aplicables a un vehículo determinado. La velocidad de colisión puede determinarse en especial en función de la velocidad propia, en donde la velocidad propia en una primera aproximación puede utilizarse como velocidad de colisión, o también puede utilizarse una señal de un sistema sensorial del entorno, por ejemplo un sistema sensorial
radar, vídeo y/o de ultrasonidos, para tener en cuenta en especial la velocidad relativa entre el objeto de colisión y el vehículo.
La aproximación de la señal de aceleración se consigue de forma ventajosa mediante valores umbrales, por medio de que la señal se comprueba con estos valores umbrales para conseguir mediante los valores umbrales momentos de exploración de la señal. En la aproximación más sencilla pueden utilizarse dos valores umbrales. Sin embargo, con cuatro valores umbrales se obtienen unos buenos resultados. Según cuánta capacidad de cálculo y memoria esté disponible, puede utilizarse también una mayor cantidad de valores umbrales.
Dibujo En el dibujo se han representado ejemplos de ejecución de la invención, que se explican en la siguiente descripción.
Aquí muestran la figura 1 un esquema de conexiones en bloques del dispositivo conforme a la invención, la figura 2 la señal y la aproximación correspondiente, y la figura 3 un diagrama de flujo.
Descripción La finalidad de la invención es la determinación exacta del momento de contacto entre el vehículo, en el que se encuentra el dispositivo, y un objeto de colisión que puede ser otro vehículo, aunque también otros objetos como una farola, una pared de edificio o incluso peatones o ciclistas. El momento de contacto es importante para la activación de los medios de protección de personas como airbags, atirantadores de cinturón o barras antivuelco, respectivamente para la activación de los medios de protección de peatones. En especial ayuda el conocimiento exacto del momento de contacto para determinar la gravedad de la colisión y, de este modo, para la activación precisa en el tiempo de los medios de protección de personas en cuanto a su fuerza de retención. Esto afecta en especial a airbags de varias etapas y atirantadores de cinturón.
Conforme a la invención se propone a continuación determinar el momento de contacto lo más exactamente posible exclusivamente sobre la base de la velocidad de colisión y de la señal, que se ha derivado de una señal de aceleración. La señal de aceleración se genera de forma ventajosa ya en el aparato de control central, que habitualmente está dispuesto sobre el túnel de vehículos. Sin embargo, es posible que se utilicen también sensores de aceleración externos o una plataforma sensorial cinemática para generar esta señal de aceleración. Debido a que la propia señal de aceleración presenta demasiados porcentajes de alta frecuencia para llevar a cabo una aproximación conveniente mediante una función, se requiere un afinamiento de la señal. Este afinamiento se consigue o bien mediante un filtrado correspondiente, de forma preferida un filtrado de paso bajo, y/o también mediante una integración simple o doble. Para el cálculo del momento de contacto puede tenerse en cuenta de forma ventajosa la velocidad de colisión. Para la velocidad de colisión puede utilizarse la velocidad propia y/o una señal de un sistema sensorial del entorno. Una señal de este tipo puede ser por ejemplo la velocidad relativa entre el vehículo y el objeto de colisión.
La figura 1 ilustra en un esquema de conexiones en bloques el dispositivo conforme a la invención. Un aparato de control 12 presenta al menos un sensor de aceleración y obtiene... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar un momento de contacto de un vehículo con un objeto de colisión, caracterizado porque el momento de contacto se determina mediante una aproximación de una señal (20) derivada de una señal de aceleración (10) con una función (21) , en donde a partir de la función (21) se calcula retroactivamente el momento de contacto, de tal modo que se determina el punto cero.
2. Procedimiento según la reivindicación 1, caracterizado porque para generar la señal (20) la señal de aceleración (10) se filtra o se integra una o dos veces.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque para determinar el momento de contacto se tiene en cuenta adicionalmente una velocidad de colisión (11) .
4. Procedimiento según la reivindicación 3, caracterizado porque la velocidad de colisión (11) se determina en función de la velocidad propia.
5. Procedimiento según la reivindicación 3 ó 4, caracterizado porque la velocidad de colisión (11) se determina en función de una señal del entorno.
6. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque la señal (20) se aproxima 15 mediante al menos dos valores umbrales (SW1, SW2, SW3, SW4) .
7. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque se utiliza una función cuadrática (21) .
8. Procedimiento según la reivindicación 7, caracterizado porque a partir de un punto culminante de la función cuadrática (21) se determina el momento de contacto.
9. Procedimiento según la reivindicación 8, caracterizado porque la velocidad de colisión se tiene en cuenta linealmente a la hora de determinar el momento de contacto.
Patentes similares o relacionadas:
DISPOSITIVO ELECTRÓNICO DE SEGURIDAD, del 20 de Marzo de 2020, de PETRONICS TECNOLOGIA S.L: Dispositivo electrónico de seguridad independiente del vehículo apto para ser fijado al vehículo que comprende una cámara de video que grava en continuo […]
 Sensor de accidentes, del 29 de Mayo de 2019, de ROBERT BOSCH GMBH: Vehículo con una pared y un sensor de accidentes con medios de fijación a un vehículo; en donde los medios […]
Sensor de accidentes, del 29 de Mayo de 2019, de ROBERT BOSCH GMBH: Vehículo con una pared y un sensor de accidentes con medios de fijación a un vehículo; en donde los medios […]
Método y dispositivo para impedir o disminuir el riesgo de una lesión en los ocupantes de un vehículo en el caso de una colisión por alcance, del 15 de Mayo de 2019, de Hochschule Kaiserslautern University of Applied Sciences: Método para evitar o disminuir el riesgo de lesión para los ocupantes de un vehículo en el caso de una colisión por alcance con los siguientes pasos de método: […]
Sistema automático de ayuda a la evacuación de los ocupantes de un automóvil caído al agua, del 26 de Noviembre de 2018, de UNIVERSIDAD DE CADIZ: Sistema automático de ayuda a la evacuación de los ocupantes de un automóvil caldo al agua. La presente invención facilita la evacuación de un […]
CONJUNTO DE PREVENCIÓN DE ACCIDENTES, del 11 de Octubre de 2018, de PÉREZ DEL MONTE, Ángel: 1. Conjunto de prevención de accidentes, caracterizado porque comprende un emisor de luz que se encuentra en conexión con un pulsador de activación integrado en […]
Sistema de supervisión mediante visión artificial para menores que viajan en sistemas de retención infantil, del 3 de Octubre de 2018, de UNIVERSIDAD DE ALCALA.: El sistema de supervisión mediante visión artificial para menores que viajan en sistemas de retención infantil, hace referencia a una invención basada en técnicas […]
Método y aparato para controlar un dispositivo de seguridad accionable, del 5 de Julio de 2017, de TRW AUTOMOTIVE U.S. LLC: Un método para determinar una condición de colisión de un vehículo incluyendo los pasos de: detectar la aceleración de colisión en una primera dirección […]
Procedimiento para hacer funcionar un sistema de protección de peatones, del 24 de Mayo de 2017, de AUDI AG: Procedimiento para hacer funcionar un sistema de protección de peatones para reducir la gravedad en accidentes en caso de colisiones frontales […]