Procedimiento y aparato de control para la activación de medios de protección de personas para un vehículo.
Procedimiento para la activación de medios de protección de personas (PS) para un vehículo (FZ),
en el que la activación se realiza en función de una rigidez de la otra parte del accidente, en el que se realiza una determinación de la rigidez en función de al menos una señal de aceleración, caracterizado porque la modificación temporal se determina por medio de un estimador de la varianza mínima.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08104823.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: C/IPE POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: HIEMER,Marcus, KOERNER,Olaf.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R21/0132 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › en respuesta a parámetros sobre el movimiento del vehículo.
PDF original: ES-2381778_T3.pdf
Fragmento de la descripción:
Procedimiento y aparato de control para la activación de medios de protección de personas para un vehículo
Estado de la técnica
La invención se refiere a un procedimiento y a un aparato de control para la activación de medios de protección de personas del tipo de las reivindicaciones independientes de la patente.
Ya se conoce a partir del documento DE 100 65 518 A1 obtener a partir de la intensidad de las oscilaciones en una señal de aceleración manifestaciones sobre la dureza del objeto de impacto. En este caso, por ejemplo, oscilaciones reducidas de las señales indican una rotura débil de la estructura del vehículo, lo que permite cerrar una barrera blanda. De esta manera, es posible clasificar un objeto de colisión con respecto a las relaciones de masas y la rigidez.
El documento US 2005/021192 A1 de acuerdo con el preámbulo de la reivindicación 1 publica un aparato de discriminación de objetos de colisión para vehículos, que contiene dos sensores de detección de la colisión para discriminar entre los tipos de un objeto de colisión, sobre la base de las variables de partida de los dos sensores. El objeto de colisión se determina, sobre la base de una amplitud de la colisión, que de detecta con la ayuda de un sensor de detección de la amplitud de la colisión, que está fijado en un cuerpo del vehículo. De manera alternativa, el objeto de colisión se determina sobre la base de una diferencia entre las propiedades de funcionamiento de los dos sensores. Como otra alternativa, los dos sensores están integrados en una unidad individual, que contiene una pluralidad de células de detección.
El documento US 5519613 A muestra un sistema y un procedimiento para la discriminación de impactos de periodos cortos.
Publicación de la invención El procedimiento de acuerdo con la invención o bien el aparato de control de acuerdo con la invención para la activación de medios de protección de personas para un vehículo con las características de las reivindicaciones independientes de la patente tienen, en cambio, la ventaja de que la determinación de la rigidez se realiza en función de una modificación temporal de al menos una señal de aceleración. De esta manera se puede realizar una determinación de la rigidez de una manera más exacta que en el estado de la técnica. La dependencia de la rigidez de esta modificación temporal resulta a partir de una consideración de un modelo de masa de resorte equivalente para ambos implicados en la colisión, es decir, el propio vehículo y el objeto de impacto.
La activación significa, en el presente caso, la activación de medios de protección de personas como medios pasivos de protección de personas, por ejemplo airbags, tensores de cinturón, reposacabezas activos en caso de impacto y medios activos de protección de personas como frenos y una regulación de la dinámica de la marcha. También se puede incluir en ellos una llamada de emergencia.
La rigidez de la otra parte del accidente es un parámetro estructural que indica, por ejemplo, cuándo se deforma elásticamente la otra parte del accidente. También la fuerza, que debe aplicarse, para alcanzar esta deformación se deduce a partir de la rigidez. La rigidez depende del material de la otra parte del accidente y de la geometría. En general, la rigidez indica la relación entre la carga, que actúa sobre el cuerpo de accidente, y su deformación elástica.
La modificación temporal de al menos una señal de aceleración indica, por ejemplo, cómo se modifica la señal de aceleración en función del tiempo, es decir, que con ello se detecta la dinámica de la señal de aceleración. No obstante, es posible que se utilice para ello también la segunda o tercera derivada de la señal de aceleración. La señal de aceleración es generada por un sensor de aceleración o bien por una instalación de detección, que es sensible o bien en una o varias direcciones espaciales.
Por un aparato de control se entiende un aparato eléctrico, que procesa señales de sensor y que en función de ello activa los medios de protección de personas. En este caso, el circuito de activación es normalmente un procesador como un microcontrolador; no obstante, también puede estar configurado de forma discreta o como SIC. También son posibles combinaciones de ellos. El módulo de rigidez es en este caso o bien una sección de hardware o una sección de software. También es posible una combinación de ambos. Si se utiliza para el circuito de activación al menos un procesador, entonces también el circuito de activación necesita hardware. A tal fin son adecuados también procesadores Dual Core.
A través de las medidas y desarrollos indicados en las reivindicaciones dependientes son posibles mejoras ventajosas del procedimiento indicado en las reivindicaciones independientes de la patente para la activación de medios de protección de personas para un vehículo o bien el aparato de control para la activación de medios de protección de personas para un vehículo.
Es ventajoso que la modificación temporal se determine por medio de un estimador de la varianza mínima. Un estimador de la varianza mínima de este tipo evita la amplificación de porciones de señales de alta frecuencia y, por lo tanto, una determinación subóptima de la modificación temporal de la señal de aceleración. Una característica especialmente ventajosa de este estimador de la varianza mínima es el llamado estimador mínimo cuadrático, Este estimador mínimo cuadrático está configurado de forma recursiva. Esto posibilita ahorros en el tiempo de ejecución y memoria en un algoritmo de aparatos de control. En cada nueva estimación se corrige en este caso solamente el último valor estimado incluyendo las propiedades estadísticas de la señal, de manera que con ello se explica el concepto "recursivo". Este modo de proceder recursivo ahorra, por lo tanto, capacidad de cálculo. Un procedimiento mínimo cuadrático recursivo se describe en la literatura, por ejemplo en U. Kiencke / L. Nielsen: Automotive Control Systems, Springer Verlag, 2ª edición, 2004. El estimador de varianza mínima o bien el estimador mínimo cuadrático pueden estar configurados con hardware y/o con software.
De manera más ventajosa, para el estimador mínimo cuadrático recursivo se utiliza un factor de omisión, que posibilita detectar de la manera más rápida posible una adaptación de la modificación temporal de la aceleración y adaptarse a ella. Este factor de omisión se puede aplicar especialmente en función del tipo de vehículo. Puesto que diferentes vehículos pueden presentar una dinámica diferente con respecto a la modificación temporal de la señal de aceleración. No obstante, esto se puede aplicar con este factor de omisión aplicable.
Es esencial que no sólo se incluya la modificación temporal de la señal de aceleración para la presente formación del concepto, sino también una señal de aceleración pre-procesada y en este caso la modificación temporal de esta señal de aceleración pre-procesada. Los procesamientos previos pueden ser filtraciones, formaciones de promedios, etc.
La utilización de un estimador de varianza mínima posibilita una estimación óptima de la modificación de la señal de aceleración en virtud de las propiedades estadísticas de esta señal de aceleración. Esto posibilita una estimación más exacta.
Además, el estimador de varianza mínima está acondicionado con memoria, lo que posibilita una adaptación a la dinámica de la señal a estimar.
Se da una característica especialmente ventajosa de la invención cuando el estimador de varianza mínima está conectado con un comparador de valor umbral y en este comparador de valor umbral se realiza una comparación del valor umbral, de manera que la señal de salida del estimador de valor umbral, es decir, la modificación temporal de la señal de aceleración, es conducida a es comparación del valor umbral. La comparación del valor umbral se configura en este caso de tal forma que ésta se realiza en función de una primera característica y esta característica está derivada de al menos una señal de accidente como por ejemplo en la señal de aceleración, una señal de la presión del aire, una señal de pre-impacto, etc. El resultado de esta comparación del valor umbral sirve para ejercer una influencia sobre un algoritmo de activación. Esta influencia se puede realizar, por ejemplo a través del desplazamiento de curvas características. En este caso son posibles también otras modificaciones... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la activación de medios de protección de personas (PS) para un vehículo (FZ) , en el que la activación se realiza en función de una rigidez de la otra parte del accidente, en el que se realiza una determinación de la rigidez en función de al menos una señal de aceleración, caracterizado porque la modificación temporal se determina por medio de un estimador de la varianza mínima.
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque el estimador de varianza mínima (MVS) es un estimador mínimo cuadrático recursivo (RLS) .
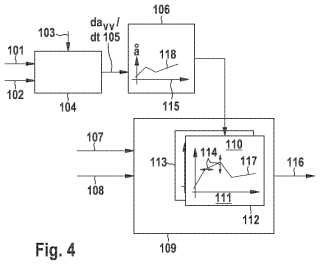
3. Procedimiento de acuerdo con la reivindicación 2, caracterizado porque se conduce un factor de omisión (103) al estimador mínimo cuadrático (RLS) , dependiendo el factor de omisión (103) del tipo de vehículo.
4. Procedimiento de acuerdo con la reivindicación 2 ó 3, caracterizado porque el estimador de varianza mínima (MVS) está condicionado con memoria.
5. Procedimiento de acuerdo con una de las reivindicaciones 1 a 4, caracterizado porque una señal de salida del estimador de varianza mínima (MVS) es sometida a una primera comparación del valor umbral en función de al menos una primera características (115) , en el que la al menos una primera característica (115) se deriva desde al menos una señal de accidente, que utiliza un resultado de la primera comparación del valor umbral para influir sobre un algoritmo de activación (109) .
6. Procedimiento de acuerdo con la reivindicación 5, caracterizado porque el algoritmo de activación (109) compara un vector característico, formado por al menos una segunda y una tercera característica (107, 108) con un segundo valor umbral (117) , para generar una señal de activación (116) , en el que la al menos una segunda y una tercera característica (107, 108) son generadas en función de la al menos una señal de accidente.
7. Aparato de control (SG) para la activación de medios de protección de personas (PS) para un vehículo (FZ) con:
- un circuito de activación (AS) , que presenta un módulo de rigidez (MVS, 10 S1) para la determinación de la rigidez de una parte contraria del accidente, en el que el circuito de activación (AS) activa en función de la rigidez los medios de protección de personas (PS) , en el que el módulo de rigidez (MVS, S1) está configurado de tal forma que
el módulo de rigidez (MVS, S1) calcula la rigidez en función de una modificación temporal de al menos una señal de aceleración, caracterizado porque el módulo de rigidez (MVS, S1) presenta un estimador de varianza mínima (MVS) , que determina la modificación temporal.
8. Aparato de control de acuerdo con la reivindicación 7, caracterizado porque el estimador de varianza mínima (MVS) está conectado con un comparador de valor umbral (S1) de tal manera que un resultado de la comparación del valor umbral es utilizada para influir sobre un algoritmo de activación (109) sobre el circuito de activación (AS) .
Patentes similares o relacionadas:
SISTEMA ELECTRÓNICO EMBEBIDO PARA LA DETECCIÓN DE INTENCIÓN DE FRENADO DE UN CONDUCTOR EN SITUACIONES DE EMERGENCIA, del 20 de Junio de 2019, de INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY: La invención se refiere a un sistema electrónico embebido para la detección de intención de frenado de un conductor en situaciones de emergencia, utilizando […]
Procedimiento para hacer funcionar un sistema de seguridad de un automóvil en caso de una colisión y automóvil, del 17 de Abril de 2019, de AUDI AG: Procedimiento para hacer funcionar un sistema de seguridad de un automóvil en caso de una colisión con un objeto de colisión, registrándose mediante […]
Método, aparato y programa informático para detectar una colisión utilizando datos de acelerómetro, del 7 de Marzo de 2019, de Redtail Telematics Limited: Un método para detectar una colisión usando un acelerómetro conectado a un vehículo; comprendiendo el método: recibir datos de aceleración del […]
Método y aparato para controlar un dispositivo de seguridad accionable, del 10 de Octubre de 2018, de TRW AUTOMOTIVE U.S. LLC: Un método para determinar una condición de colisión de un vehículo incluyendo los pasos de: detectar aceleración de colisión en una primera dirección sustancialmente […]
Dispositivo para la puesta a disposición de una característica de activación para la activación de un dispositivo de seguridad de un vehículo motorizado, del 30 de Mayo de 2018, de VOLKSWAGEN AKTIENGESELLSCHAFT: Dispositivo para la puesta a disposición de una característica de activación (12a, b) para una señal de activación que provoca una activación de un dispositivo […]
Procedimiento y aparato de control para controlar medios para la protección de personas para un vehículo, del 11 de Abril de 2018, de ROBERT BOSCH GMBH: Procedimiento para el control de medios para la protección de personas (PS) para un vehículo (FZ) en función de un proceso de vuelco que se detecta en función de variables de […]
Procedimiento para el control de un tensor de cinturón reversible de un cinturón de seguridad en un vehículo de motor, del 9 de Agosto de 2017, de AUDI AG: Procedimiento para el control de un tensor de cinturón reversible de un cinturón de seguridad en un vehículo de motor mediante - detección de un desarrollo […]
Sistema de protección contra colisión y/o de personas para un vehículo motorizado, del 20 de Julio de 2016, de AUDI AG: Sistema de protección contra choques y de personas , en particular sistema de protección para ocupantes o sistema de protección de peatones para un vehículo motorizado, […]