PROCEDIMIENTO DE ASISTENCIA AL PILOTO EN ATERRIZAJES DE HELICÓPTEROS EN VUELO VISUAL BAJO CONDICIONES DE BROWN-OUT O WHITE-OUT.
Procedimiento de asistencia al piloto en aterrizajes de helicópteros en vuelo visual bajo condiciones de brown-out o white-out,
caracterizado porque se generan durante el vuelo de aproximación para el aterrizaje datos 3D del lugar de aterrizaje previsto por medio de un sensor 3D situado a bordo del helicóptero, con una resolución de al menos 0,5º y una tasa de datos superior a 20000 píxeles/s, se acumulan estos datos con ayuda de los datos de posición y situación del helicóptero para obtener una representación 3D del lugar de aterrizaje, y se establece continuamente a partir de esta representación 3D en la perspectiva correspondiente a la posición y situación actuales del helicóptero una visión exterior virtual que se le presenta al piloto, estando presente una rutina de control con la que se asegura que los datos 3D del lugar de aterrizaje previsto, que se han generado en condiciones de brown-out o white-out, sean tenidos en cuenta para la acumulación de la representación 3D
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05019389.
Solicitante: EADS DEUTSCHLAND GMBH.
Nacionalidad solicitante: Alemania.
Dirección: WILLY-MESSERSCHMITT-STRASSE 85521 OTTOBRUNN ALEMANIA.
Inventor/es: Scherbarth,Stefan,Dr.
Fecha de Publicación: .
Fecha Solicitud PCT: 7 de Septiembre de 2005.
Clasificación Internacional de Patentes:
- G01S17/89 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › para la cartografía o la formación de imágenes.
Clasificación PCT:
- G01C23/00 G01 […] › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos combinados que indican más de un valor de navegación, p. ej. para aeronaves; Dispositivos de medida combinados para la medida de dos o más variables de movimiento, p. ej. distancia, velocidad, aceleración.
- G01S17/89 G01S 17/00 […] › para la cartografía o la formación de imágenes.
Clasificación antigua:
- G01C23/00 G01C […] › Instrumentos combinados que indican más de un valor de navegación, p. ej. para aeronaves; Dispositivos de medida combinados para la medida de dos o más variables de movimiento, p. ej. distancia, velocidad, aceleración.
- G01S17/89 G01S 17/00 […] › para la cartografía o la formación de imágenes.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2373445_T3.pdf
Fragmento de la descripción:
Procedimiento de asistencia al piloto en aterrizajes de helicópteros en vuelo visual bajo condiciones de brown-out o white-out.
La invención concierne a un procedimiento de asistencia al piloto en aterrizajes de helicópteros en vuelo visual bajo condiciones de brown-out o white-out.
En vuelos de aproximación para aterrizaje de helicópteros sobre un campo de aterrizaje polvoriento o cubierto de nieve se presenta en la fase final una súbita y fuerte restricción de la visibilidad debido al polvo o nieve arremolinados. Este fenómeno, denominado brown-out o white-out, constituye un considerable potencial de riesgo en aterrizajes bajo vuelo visual (VFR) . El piloto pierde la orientación sobre su situación de vuelo y altura de vuelo con respecto al suelo; el polvo o nieve arremolinados a su alrededor simulan para él una situación oblicua o una inclinación del helicóptero. Esto conduce una y otra vez a accidentes y representa actualmente la causa individual predominante de todos los accidentes de helicópteros.
El articulo "Brown-Out survival - technology or training?" en la revista "Defence Helicopter", Editorial Shepard, páginas 10-12, edición de Febrero/Marzo de 2004, ofrece una instructiva introducción a la problemática del brownout o white-out y muestra unos primeros enfoques técnicos de solución que se discuten también brevemente en lo que sigue.
Según el estado actual de la técnica, el piloto en helicópteros correspondientemente equipados tiene a su disposición los instrumentos para las condiciones de vuelo con instrumentos. Por tanto, al presentarse condiciones de brown-out o white-out se puede aterrizar, según las reglas del vuelo con instrumentos, bajo orientación, por ejemplo, en el horizonte artificial y en el altímetro del radar. Sin embargo, es problemático aquí el hecho de que en la fase crítica poco antes del aterrizaje se tiene que realizar súbitamente una conmutación completa de la orientación con ayuda de la visión exterior natural a la orientación con ayuda de información abstracta de los instrumentos. Esto requiere un entrenamiento permanente de los pilotos para esta situación crítica y, no obstante, conduce una y otra vez a accidentes.
Se conocen también propuestas que intentan con una sensórica basada en GPS ofrecer informaciones auxiliares a los pilotos. Se evita así ciertamente el coste de la instrumentación completa para vuelo con instrumentos, pero con ello no se modifica en nada el problema de principio de la conmutación necesaria de una orientación según visión a una orientación según instrumentos.
Se ha propuesto también detectar el lugar de aterrizaje con ayuda de radar a través del polvo o la nieve. Esto fracasa con los radares actualmente disponibles y con la resolución demasiado pequeña y también con la distancia de detección mínima. También son considerables los costes y el peso de un radar. El sistema ROSAR propuesto en el documento DE 43 28 573 C2 ha podido atravesar en principio el polvo o la nieve en condiciones de brown-out o white-out y prestar una asistencia al piloto mediante la representación gráfica allí propuesta de los ecos de radar momentáneos. Si embargo, un radar de esta clase representa un esfuerzo considerable en materia de costes y también respecto del peso de tal sistema, de modo que actualmente aún no está disponible ningún sistema ROSAR en el mercado.
En el documento WO 02/450048 A1 se describe un procedimiento de navegación y aterrizaje para aviones y helicópteros con el que se genera continuamente para el piloto una visión exterior virtual recurriendo a un banco de datos de terreno presente a bordo y a un banco de datos de obstáculos. El banco de datos de obstáculos se actualiza durante el vuelo mediante un enlace inalámbrico con un estación terrestre. Por tanto, este procedimiento está limitado a lugares de aterrizaje equipados con una infraestructura correspondiente y no resulta así adecuado para resolver el problema de brown-out o white-out que se presenta precisamente en aterrizajes exteriores sobre terreno no preparado.
El documento EP 0 911 647 A2 describe un sistema de vuelo que le posibilita también una visión exterior virtual al piloto de una aeronave. Se accede para ello a un banco de datos que, dependiendo de la resolución de los datos almacenados en el mismo, está subdividido en tres memorias, a saber, datos topográficos de espacio amplio, datos topográficos de espacio estrecho y datos de obstáculos, tales como, por ejemplo, posición y altura de líneas eléctricas, edificios altos, etc. El banco de datos es actualizado durante el vuelo por medio de diferentes sensores 3D. En tiempo atmosférico bueno se generan datos de espacio estrecho del entorno y en tiempo atmosférico malo se parte de la consideración de que pueden generarse al menos todavía los datos de obstáculos con los sensores 3D.
Asimismo, el procedimiento según el documento EP 0 911 647 A2 se caracteriza porque la generación de la visión virtual se establece a partir de reducidos datos topográficos abstractos o datos de obstáculos.
La invención se basa en el problema de proporcionar al piloto una asistencia de vuelo fiable para aterrizajes en vuelo
visual bajo condiciones de brown-out o white-out.
Este problema se resuelve con el procedimiento según la reivindicación 1. Ejecuciones ventajosas de la invención son objeto de reivindicaciones subordinadas.
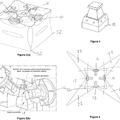
Según la invención, se equipa el helicóptero con un sensor 3D de mayor resolución que mira hacia delante y con un sistema de referencia de situación. El sensor 3D presenta una resolución de al menos 0, 5º y una tasa de datos > aproximadamente 20000 píxeles/s. El sensor 3D capta continuamente el lugar de aterrizaje durante el vuelo de aproximación al mismo. A partir de los datos 3D acumulados se genera con ayuda de los datos de situación y posición de vuelo del sistema de referencia de situación del helicóptero una visión naturalmente virtual del lugar de aterrizaje, concretamente en una perspectiva que corresponde a la situación y posición actuales del helicóptero. Esta visión exterior virtual es puesta a disposición del piloto por medio de un dispositivo de visualización (pantalla, display de cabeza alta, etc.) .
Por medio de una rutina de control se asegura, además, que los datos 3D que se hayan generado durante una condición de brown-out o white-out no entren en el cálculo de la visión exterior virtual. Una primera realización posible para ello consiste en analizar los datos entrantes para detectar así directamente una condición de brown-out
o white-out.
Los sensores 3D actuales de mayor resolución son adecuados solamente como sensores VFR, es decir que no están en condiciones de, al presentarse brown-out o white-out, atravesar este último. Por tanto, en el momento del brown-out o white-out se reconoce este con ayuda de los datos de los sensores mediante una evaluación gráfica realizada automáticamente con ayuda de la reproducción 3D de la nube de polvo. Durante el brown-out se sigue poniendo entonces a disposición del piloto la visión virtual a base de los datos 3D obtenidos delante del brown-out o white-out, adaptándose también continuamente la perspectiva con ayuda de los datos de referencia de situación a la posición y situación actuales del helicóptero.
Para asegurar que los datos 3D generados durante una condición de brown-out o white-out no entren en el cálculo de la visión exterior virtual, se puede prever también, alternativamente a la detección directa anteriormente descrita de una condición de brown-out o white-out, que se empleen solamente aquellos datos 3D que se hayan generado durante el vuelo de aproximación por encima de una altura de vuelo mínima prefijada determinada. Esta altura de vuelo mínima se elige de modo que por encima de esta altura de vuelo mínima pueda seguirse excluyendo con seguridad una condición de brown-out o white-out. Un valor típico es aquí aproximadamente 10-15 m. La medición de altura puede realizarse especialmente con un altímetro de radar. Por debajo de la altura de vuelo mínima se le sigue proporcionando al piloto la visión exterior visual en base a los datos 3D obtenidos por encima de la altura de vuelo mínima, adaptándose también continuamente la perspectiva con ayuda de los datos de referencia de situación a la posición y situación actuales del helicóptero.
La visión exterior virtual deberá adaptarse con la mayor rapidez posible a los movimientos... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de asistencia al piloto en aterrizajes de helicópteros en vuelo visual bajo condiciones de brown-out
o white-out, caracterizado porque se generan durante el vuelo de aproximación para el aterrizaje datos 3D del lugar de aterrizaje previsto por medio de un sensor 3D situado a bordo del helicóptero, con una resolución de al menos 0, 5º y una tasa de datos superior a 20000 píxeles/s, se acumulan estos datos con ayuda de los datos de posición y situación del helicóptero para obtener una representación 3D del lugar de aterrizaje, y se establece continuamente a partir de esta representación 3D en la perspectiva correspondiente a la posición y situación actuales del helicóptero una visión exterior virtual que se le presenta al piloto, estando presente una rutina de control con la que se asegura que los datos 3D del lugar de aterrizaje previsto, que se han generado en condiciones de brown-out o white-out, sean tenidos en cuenta para la acumulación de la representación 3D.
2. Procedimiento según la reivindicación 1, caracterizado porque la rutina de control está concebida de tal manera que se analicen datos 3D entrantes para reconocer una condición de brown-out o una condición de white-out, en donde los datos 3D que se generan a partir del momento del reconocimiento de una condición de brown-out o una condición de white-out no se tienen en cuenta para la acumulación de la representación 3D.
3. Procedimiento según la reivindicación 1, caracterizado porque la rutina de control está concebida de tal manera que se mida continuamente la altura del helicóptero sobre el suelo, y porque los datos 3D que se generan por debajo de una altura mínima prefijada no se tienen en cuenta para la acumulación de la representación 3D.
4. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque el sistema de referencia de situación emplea también los datos 3D generados para calcular los datos de situación y posición.
5. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque la visión exterior virtual se rinde en forma fotorrealista.
6. Procedimiento según la reivindicación 5, caracterizado porque durante el vuelo de aproximación se registra por una videocámara en color la distribución de color y de valores de gris del lugar de aterrizaje y se genera la visión exterior virtual en aproximación al color real y a la distribución real de valores de gris.
7. Procedimiento según la reivindicación 5 ó 6, caracterizado porque, para contribuir la percepción de la escena, se simula en la escena rendida una iluminación solar con proyección de sombras de conformidad con la altura del sol conocida por la posición y la hora.
8. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque, para generar los datos 3D, se utiliza un sensor 3D con una resolución de al menos 0, 5º y una tasa de datos de más 20000 píxeles/s.
9. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque la visión exterior virtual se representa sobre un display de pantalla o un display de cabeza alta.
10. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque los datos 3D se acumulan durante un período de tiempo de más de 1 segundo para generar una representación 3D del lugar de aterrizaje.
11. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque la visión exterior virtual se genera con una frecuencia de repetición de al menos 20 Hz.
Patentes similares o relacionadas:
ESCÁNER ÓPTICO A COLOR AEROTRANSPORTADO, del 4 de Junio de 2020, de AEROLASER SYSTEM S.L: ESCÁNER ÓPTICO A COLOR AEROTRANSPORTADO de sistema Flash-LADAR con láser , ópticas divisor de haz hacia un primer detector , espejo primario […]
Procedimiento y dispositivo para estabilizar localmente un punto de radiación en un objeto diana distante, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Un procedimiento para estabilizar localmente un punto de radiación (S) en un objeto diana distante (Z), donde el punto de radiación (S) se forma […]
Procedimiento y dispositivo para estabilizar localmente un punto de radiación en un objeto diana distante, del 15 de Abril de 2020, de MBDA Deutschland GmbH: Un procedimiento para estabilizar localmente un punto de radiación (S) en un objeto diana distante (Z), donde el punto de radiación (S) se forma a partir de un haz láser […]
Proceso y sistema para calcular el coste de materiales utilizables y consumibles para pintar vehículos de motor a partir del análisis de deformaciones en vehículos de motor, del 11 de Marzo de 2020, de Uesse S.R.L: Proceso para calcular el coste de materiales utilizables y consumibles para pintar vehículos de motor, a partir de un análisis de deformaciones en los vehículos […]
Métodos para realizar tareas en un tanque que contiene sustancias peligrosas, del 5 de Febrero de 2020, de Tankbots, Inc: Un método para realizar una tarea seleccionada en un tanque al menos parcialmente lleno de una sustancia energética ; caracterizado el método por: - dimensionar […]
Un sistema de cámara aérea, del 8 de Enero de 2020, de Spookfish Innovations Pty Ltd: Un sistema de cámara aérea que comprende: al menos una cámara dispuesta para capturar una pluralidad de imágenes sucesivas, incluyendo […]
Procedimiento de adquisición de imágenes de una escena, desde un sensor a bordo de un portador en desplazamiento, con servocontrol de su línea de visión, del 25 de Diciembre de 2019, de THALES: Procedimiento de adquisición de imágenes de una escena terrestre predeterminada, desde un portador en desplazamiento según una trayectoria […]
 Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]