TENSOR ELÉCTRICO.
Tensor eléctrico con una carcasa (2) que se puede sujetar al husillo de trabajo de una máquina herramienta,
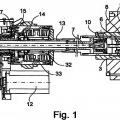
en la cual está alojado un vástago roscado (3) desplazable axialmente para la regulación de las mordazas de sujeción de un mandril, y con un servomotor (4) eléctrico, cuyo rotor se encuentra en unión de impulsión con una rueda motriz (6), caracterizado porque la rueda motriz (6) está unida con el generador de eje (7) de un reductor cónico recto y la rueda hueca (8) del reductor cónico recto con la carcasa (2), y porque un casquillo de acero (9) que presenta un dentado exterior del reductor cónico recto está previsto como accionamiento para la tuerca del husillo asignada al vástago roscado (3)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2007/001893.
Solicitante: ROHM GMBH.
Nacionalidad solicitante: Alemania.
Dirección: HEINRICH-RÖHM-STRASSE 50 89567 SONTHEIM ALEMANIA.
Inventor/es: TAGLANG, JOHANN, KUSNIK,THORSTEN.
Fecha de Publicación: .
Fecha Solicitud PCT: 24 de Octubre de 2007.
Clasificación Internacional de Patentes:
- B23B31/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23B TORNEADO; TALADRADO (usando un electrodo en lugar de una herramienta B23H, p.ej. haciendo agujeros B23H 9/14; trabajando con un haz de laser B23K 26/00; dispositivos para copiar o controlar B23Q). › B23B 31/00 Mandriles de presión; Mandriles extensibles; Sus adaptaciones para el control a distancia (dispositivos destinados a fijarse sobre un mandril en general B23Q 3/12; fijación por fuerza magnética o eléctrica que actúa directamente sobre las piezas que van a ser trabajadas B23Q 3/152). › usando medios eléctricos o magnéticos en el mandril.
Clasificación PCT:
- B23B31/28 B23B 31/00 […] › usando medios eléctricos o magnéticos en el mandril.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2360637_T3.pdf
Fragmento de la descripción:
La invención se refiere a un tensor eléctrico con una carcasa que puede sujetarse al husillo de trabajo de una máquina herramienta, en la cual está alojado un vástago roscado desplazable axialmente para la regulación de las mordazas de sujeción de un mandril, y con un servomotor eléctrico cuyo rotor se encuentra en unión de impulsión con una rueda motriz.
Para el accionamiento de las mordazas de sujeción de un mandril dispuesto en una máquina herramienta se utilizan en la práctica actualmente cilindros de sujeción, como se es conocido por el solicitante por ejemplo, del documento DE 198 23 823 C2. Estos cilindros de sujeción son accionados hidráulicamente para derivar de un desplazamiento axial de un cilindro unido a una barra de tracción, el desplazamiento radial de las mordazas de sujeción en el mandril.
Los cilindros de sujeción oscilantes que pueden accionarse hidráulicamente usuales están dispuestos directamente sobre una bancada o en un dispositivo de sujeción, girando con ellos y apuntalando la fuerza de sujeción sobre el husillo de trabajo. En caso de una interrupción del suministro de tensión, podrán mantenerse durante un cierto tiempo las fuerzas de tensado por medio de válvulas de seguridad. Pero estos cilindros de tensado no pueden posicionarse con gran precisión, ni pueden regularse las fuerzas de tensado con una gran precisión, de modo que se encuentra limitada la aplicación de estos cilindros de tensado como unidades de apoyo regulables automáticamente.
En el estado de la técnica se describen intentos, como por ejemplo, en el documento DE 32 18 083 C2, los cuales son considerados como cercanos al estado de la técnica con respecto al objeto de la reivindicación 1, de reemplazar tales cilindros de tensado accionados hidráulicamente por tensores eléctricos, en los cuales el desplazamiento de las barras de tracción se realiza mediante un motor eléctrico y no por un medio de presión. Estos tensores eléctricos no se han impuesto hasta ahora en la práctica y se encuentran sólo como prototipos, dado que estos tensores eléctricos deben presentar una construcción muy costosa para poder garantizar el ajuste de tensión requerido en cada sistema. También es desventajoso que con los tensores eléctricos conocidos hasta ahora sea necesario en general un gran gasto de energía.
Además, en el estado de la técnica, como por ejemplo, en el documento DE 101 20 939 B4, se describen dispositivos de agarre electromecánicos, los que presentan la desventaja de una fuerza de sujeción muy débil. Al interrumpirse el suministro de tensión la fuerza de tensado no podrá mantenerse.
Además, se conocen dispositivos de agarre electromagnéticos que poseen también la desventaja de las fuerzas de sujeción débiles y en los que no puede mantenerse la fuerza de sujeción en el caso de una interrupción del suministro de tensión. Además, estos tensores magnéticos atraen las virutas metálicas y el polvo metálico en el tensado por lo que podrán producirse problemas en el posicionado o hasta huellas de estas partículas sobre las piezas a trabajar.
La invención tiene como objeto, por lo tanto, desarrollar un tensor eléctrico del tipo mencionado anteriormente, de modo que mediante una conexión eléctrica directa pueda generarse de manera simple una fuerza de sujeción axial para elementos de sujeción en husillos de trabajo, garantizando una regulación de la fuerza de sujeción también durante el movimiento giratorio del husillo de trabajo.
Este objeto se logra mediante las características de la reivindicación 1.
Un tensor eléctrico de este tipo presenta algunas ventajas notables. Así, el momento de torsión pequeño a ser generado por el servomotor a grandes números de revoluciones del servomotor debido a la multiplicación en el reductor cónico recto (harmonic drive) es transformado en un número de revoluciones bajo y un momento de torsión elevado en la tuerca del husillo. Como especialmente ventajoso se ha comprobado en reductor cónico recto (harmonic drive) una multiplicación de 20 hasta 200 a 1.
Dado que además la rueda hueca está unida en forma fija con la carcasa, el casquillo de acero que presenta un dentado exterior (flexspline) trabaja en la dirección de giro contraria a la del husillo de trabajo y del servomotor, como accionamiento para la tuerca del husillo. Esta mueve entonces al vástago roscado en dirección axial hacia adelante y/o hacia atrás y tensa o distiende el mandril. Si el husillo de trabajo se mueve con el número de revoluciones de trabajo, el tensor eléctrico girará entonces con el mismo número de revoluciones, dado que la carcasa está fijada al husillo de trabajo. Esto significa también que la rueda de accionamiento y con ello también el rotor del servomotor se mueven con el mismo número de revoluciones que el husillo de trabajo. Dado que el servomotor está diseñado para velocidades de rotación muy elevadas, genera una corriente eléctrica muy débil a la velocidad comparativamente menor del husillo de trabajo, de modo que el momento de torsión reducido no ejerce influencia sobre el husillo de trabajo. Pero este momento de torsión reducido produce también por la inversión de la dirección del movimiento de la tuerca del husillo un reajuste de la tensión en el mandril.
Cuando se interrumpe el suministro del tensado, el momento de torsión del servomotor se utiliza para el frenado del movimiento giratorio del husillo de trabajo, de modo que por la inversión del movimiento giratorio con respecto a la tuerca del husillo estará disponible este momento de torsión para el tensado seguro del mandril hasta la detención del husillo de trabajo.
Para alcanzar una longitud constructiva corta del tensor eléctrico está previsto además, que el motor eléctrico esté ubicado lateralmente al lado de la carcasa, en donde entonces preferentemente el motor eléctrico está unido mediante una correa de transmisión con la rueda de accionamiento; Toda otra unión, por ejemplo, mediante engranajes es por supuesto también posible.
Además, en el marco de la invención está previsto que un casquillo de acero que presenta un dentado exterior está acoplado a través de un acoplamiento de garras con la tuerca del husillo, la cual podrá tener un juego para facilitar la abertura por el golpe producido en el caso de mandriles autobloqueantes.
Alternativamente, el casquillo de acero que presenta un dentado exterior podrá estar acoplado en forma rígida con la tuerca del husillo, con lo que se logra una elevada precisión en el posicionamiento.
Se prefiere muy especialmente en el marco de la invención que la tuerca del husillo esté ampliada a un mecanismo con elementos fileteados de rodillos, de manera de garantizar así un desplazamiento confiable del vástago roscado.
Se prefiere además, cuando la tapa de la carcasa está prevista para la conexión con el bastidor de la máquina herramienta para aliviar así el apoyo del husillo de trabajo y para evitar un efecto de la unión del servomotor a través del accionamiento por correa sobre el husillo de trabajo.
Una forma de realización ventajosa del tensor eléctrico presenta un contactor, que está ubicado de modo que con una interrupción de la tensión el motor eléctrico está en cortocircuito. Con ello estará disponible el momento del motor eléctrico para el frenado del movimiento giratorio del husillo de trabajo.
Preferentemente, el motor eléctrico en el tensor eléctrico posee un motor paso a paso, en donde el motor paso a paso presenta la ventaja de que el mando del motor podrá ser usado simultáneamente como un posicionador para la determinación del tensado de las mordazas. De este modo por un lado podrán ahorrarse sistemas posicionadores costosos y por otro lado el mando del motor paso a paso podrá estar conformado adicionalmente como un posicionador del desplazamiento de las mordazas, por lo que podrá programarse libremente desde el comando el posicionado de las mordazas.
Alternativamente, en el tensor eléctrico el motor eléctrico podrá contener un servomotor. Se prefiere el servomotor diseñado para un número de revoluciones de hasta 6500 rpm con lo que es posible un mecanizado especialmente rápido.
En otra forma de realización ventajosa del tensor eléctrico está dispuesto por lo menos un sensor en por lo menos una mordaza para captar la fuerza de sujeción, de modo que durante el mecanizado pueda captarse exactamente la fuerza de sujeción y mediante un ajuste fino del motor eléctrico... [Seguir leyendo]
Reivindicaciones:
1. Tensor eléctrico con una carcasa (2) que se puede sujetar al husillo de trabajo de una máquina herramienta, en la cual está alojado un vástago roscado (3) desplazable axialmente para la regulación de las mordazas de sujeción de un mandril, y con un servomotor (4) eléctrico, cuyo rotor se encuentra en unión de impulsión con una rueda motriz (6), caracterizado porque la rueda motriz (6) está unida con el generador de eje (7) de un reductor cónico recto y la rueda hueca (8) del reductor cónico recto con la carcasa (2), y porque un casquillo de acero (9) que presenta un dentado exterior del reductor cónico recto está previsto como accionamiento para la tuerca del husillo asignada al vástago roscado (3).
2. Tensor eléctrico de acuerdo con la reivindicación 1, caracterizado porque el reductor cónico recto presenta una transmisión de 20 hasta 200 a 1.
3. Tensor eléctrico de acuerdo con la reivindicación 1 o 2, caracterizado porque el motor eléctrico (4) está ubicado lateralmente junto a la carcasa (2).
4. Tensor eléctrico de acuerdo con la reivindicación 3, caracterizado porque el motor eléctrico (4) está unido a través de un accionamiento por correa (5) con la rueda motriz (6).
5. Tensor eléctrico de acuerdo con una de las reivindicaciones precedentes, caracterizado porque el casquillo de acero (9) que presenta un dentado exterior está acoplado mediante un acoplamiento de garras (11) con la tuerca de husillo.
6. Tensor eléctrico de acuerdo con la reivindicación 5, caracterizado porque el acoplamiento de garras (11) posee un juego.
7. Tensor eléctrico de acuerdo con una de las reivindicaciones 1 a 4, caracterizado porque el casquillo de acero (9) que presenta un dentado exterior está acoplado en forma rígida con la tuerca de husillo.
8. Tensor eléctrico de acuerdo con una de las reivindicaciones 1 a 7, caracterizado porque la tuerca de husillo está ampliada a un husillo de rosca de rodillos (16).
9. Tensor eléctrico de acuerdo con una de las reivindicaciones 1 a 8, caracterizado porque está previsto que la tapa
(12) de la carcasa (2) esté unida al bastidor (13) de la máquina herramienta.
10. Tensor eléctrico de acuerdo con una de las reivindicaciones precedentes, caracterizado por un contactor que está dispuesto de manera que en caso de una interrupción de la tensión el motor eléctrico (4) se ponga en cortocircuito.
11. Tensor eléctrico de acuerdo con una de las reivindicaciones precedentes, caracterizado porque el motor eléctrico
(4) presenta un motor paso a paso.
12. Tensor eléctrico de acuerdo con la reivindicación 11, caracterizado porque un comando del motor paso a paso está conformado adicionalmente como un posicionador del ajuste de las mordazas de sujeción.
13. Tensor eléctrico de acuerdo con una de las reivindicaciones 1 a 10, caracterizado porque el motor eléctrico (4) presenta un servomotor.
14. Tensor eléctrico de acuerdo con la reivindicación 13, caracterizado porque el servomotor está diseñado para un número de revoluciones de hasta 6500 rpm.
15. Tensor eléctrico de acuerdo con una de las reivindicaciones precedentes, caracterizado porque para el registro de la fuerza de sujeción hay por lo menos un sensor en por lo menos una mordaza de sujeción.
16. Tensor eléctrico de acuerdo con la reivindicación 15, caracterizado por un comando para el ajuste de las mordazas de sujeción en función de los datos del sensor.
17. Tensor eléctrico de acuerdo con una de las reivindicaciones precedentes, caracterizado porque en el vástago roscado (3) se ha incorporado una leva de mando (15) que puede deslizarse a lo largo de un bulón.
18. Tensor eléctrico de acuerdo con una de las reivindicaciones precedentes, caracterizado porque las mordazas de sujeción (17) pueden ser accionadas a través de un engranaje cónico (16), el cual está unido con el vástago roscado (3).
19. Dispositivo de agarre con un tensor eléctrico de acuerdo con una de las reivindicaciones precedentes.
20. Robot o sistema de manipuleo con un dispositivo de agarre de acuerdo con la reivindicación 19.
21. Máquina herramienta con un tensor eléctrico de acuerdo con una de las reivindicaciones 1 a 18.
Patentes similares o relacionadas:
Unidad de sujeción, en particular para el uso en un centro de mecanizado o un centro de giro o de fresado, del 3 de Diciembre de 2018, de SMW-AUTOBLOK Spannsysteme GmbH: Unidad de sujeción, en particular para el uso en un centro de mecanizado o un centro de giro o de fresado, comprendiendo la unidad de sujeción una carcasa exterior de forma […]
Mandril de sujeción con motores eléctricos, del 24 de Agosto de 2016, de SMW-AUTOBLOK Spannsysteme GmbH: Mandril de sujeción para el apoyo de piezas de trabajo simétricas en rotación que se deben mecanizar mediante una máquina-herramienta, […]
Procedimiento para sujetar una herramienta o una pieza de trabajo, así como dispositivo para la realización del procedimiento, del 24 de Diciembre de 2014, de ROHM GMBH: Procedimiento para sujetar una herramienta o una pieza de trabajo por medio de un dispositivo de sujeción eléctrico , que comprende una carcasa fijada en el husillo de […]
 Mandril de fijación y procedimiento para su funcionamiento, del 6 de Agosto de 2014, de ROHM GMBH: Mandril de fijación para la fijación de árboles de cigüeñal, con una punta de centrado ajustable axialmente, guiada en el cuerpo de mandril y con mordazas […]
Mandril de fijación y procedimiento para su funcionamiento, del 6 de Agosto de 2014, de ROHM GMBH: Mandril de fijación para la fijación de árboles de cigüeñal, con una punta de centrado ajustable axialmente, guiada en el cuerpo de mandril y con mordazas […]
 Dispositivo de sujeción, del 20 de Junio de 2012, de OTT-JAKOB GMBH & CO. SPANNTECHNIK KG: Dispositivo de sujeción para sujetar una herramienta o un portaherramientas en un husillo detrabajo , especialmente de una máquina herramienta, con una barra […]
Dispositivo de sujeción, del 20 de Junio de 2012, de OTT-JAKOB GMBH & CO. SPANNTECHNIK KG: Dispositivo de sujeción para sujetar una herramienta o un portaherramientas en un husillo detrabajo , especialmente de una máquina herramienta, con una barra […]
MANDRIL DE SUJECION PARA UN MAQUINA HERRAMIENTA., del 16 de Mayo de 2004, de WIDL, GERHARD, DR.-ING.: Mandril de pieza de trabajo para maquina-herramienta, por ejemplo torno o máquina amoladora, utiliza elementos de ajuste accionados eléctrica y/o magnéticamente para operación […]
DISPOSITIVO PARA LA SUJECION DE HERRAMIENTAS., del 16 de Agosto de 2003, de INNOVAT GESELLSCHAFT FUR SONDERMASCHINENBAU, MESS- UND STEUERUNGSTECHNIK MBH BILZ WERKZEUGFABRIK GMBH & CO. KG: Dispositivo para sujeción y liberación de una herramienta que tiene un vástago en un portaherramientas , cuyo portaherramientas tiene una […]
 DISPOSITIVO DE FIJACION DE UNA MAQUINA HERRAMIENTA, del 16 de Diciembre de 2008, de BERG & CO. GMBH: Dispositivo de fijación de una máquina herramienta con un operador de la fijación, accionable por medio de un motor eléctrico, para el desplazamiento […]
DISPOSITIVO DE FIJACION DE UNA MAQUINA HERRAMIENTA, del 16 de Diciembre de 2008, de BERG & CO. GMBH: Dispositivo de fijación de una máquina herramienta con un operador de la fijación, accionable por medio de un motor eléctrico, para el desplazamiento […]