Procedimiento para sujetar una herramienta o una pieza de trabajo, así como dispositivo para la realización del procedimiento.
Procedimiento para sujetar una herramienta o una pieza de trabajo por medio de un dispositivo de sujeción eléctrico (1),
que comprende una carcasa (2) fijada en el husillo de trabajo de una máquina herramienta y en la cual está alojada desplazable axialmente una barra roscada (3) para el desplazamiento de las mordazas de sujeción de un mandril de sujeción, y un motor de regulación eléctrico (4), cuyo rotor está en conexión de accionamiento con una rueda de accionamiento (6) que desplaza a la tuerca de husillo (7) de la barra roscada (3), estando asignado a la barra roscada (3) un primer sensor para el registro de su posición axial y estando asignado a la tuerca de husillo (7) un segundo sensor para el registro de su posición axial, comprendiendo el paso del procedimiento la determinación de la posición de la barra roscada (3) por medio del primer sensor al producirse una ligera fuerza axial debido al apoyo de las mordazas de sujeción en la herramienta o en la pieza de trabajo, y desplazamiento continuado de la tuerca de husillo (7), hasta que por medio del segundo sensor esté establecida una diferencia de transmisor predeterminada (12) entre el primer sensor y el segundo sensor, caracterizado porque la tuerca de husillo (7) está alojada axialmente entre dos paquetes elásticos (8), que son tensados en la generación de la diferencia de transmisor predeterminada (12).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2010/075068.
Solicitante: ROHM GMBH.
Nacionalidad solicitante: Alemania.
Dirección: HEINRICH-RÖHM-STRASSE 50 89567 SONTHEIM/BRENZ ALEMANIA.
Inventor/es: HANGLEITER, EUGEN, SCHENK, PETER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23B31/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23B TORNEADO; TALADRADO (usando un electrodo en lugar de una herramienta B23H, p.ej. haciendo agujeros B23H 9/14; trabajando con un haz de laser B23K 26/00; dispositivos para copiar o controlar B23Q). › B23B 31/00 Mandriles de presión; Mandriles extensibles; Sus adaptaciones para el control a distancia (dispositivos destinados a fijarse sobre un mandril en general B23Q 3/12; fijación por fuerza magnética o eléctrica que actúa directamente sobre las piezas que van a ser trabajadas B23Q 3/152). › usando medios eléctricos o magnéticos en el mandril.
- B23Q17/00 B23 […] › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00).
PDF original: ES-2533337_T3.pdf
Fragmento de la descripción:
Procedimiento para sujetar una herramienta o una pieza de trabajo, así como dispositivo para la realización del procedimiento El invento está constituido por un procedimiento según la reivindicación 1 para sujetar una herramienta o una pieza de trabajo por medio de un dispositivo de sujeción eléctrico, que comprende una carcasa fijada en el husillo de trabajo de una máquina herramienta y en la cual está alojada desplazable axialmente una barra roscada para el desplazamiento de las mordazas de sujeción de un mandril de sujeción, y comprende un motor de regulación eléctrico, cuyo rotor está en conexión de accionamiento con una rueda de accionamiento que desplaza a la tuerca de husillo de la barra roscada, estando asignado a la barra roscada un primer sensor para el registro de su posición axial y estando asignado a la tuerca de husillo un segundo sensor para el registro de su posición axial, comprendiendo el paso del procedimiento la determinación de la posición de la barra roscada por medio del primer sensor al producirse una ligera fuerza axial debido al apoyo de las mordazas de sujeción en la herramienta o en la pieza de trabajo y desplazamiento continuado de la tuerca de husillo, hasta que por medio del segundo sensor esté establecida una diferencia de transmisor predeterminada entre el primer sensor y el segundo sensor, estando asignados a la tuerca de husillo paquetes elásticos dispuestos en ambos lados, que son tensados en la generación de la diferencia de transmisor predeterminada. Es además objeto del invento un dispositivo para la realización del procedimiento anteriormente mencionado.
Por el documento DE 10 2006 050 918 A1 es conocido un dispositivo de sujeción eléctrico, en el cual se utiliza un motor eléctrico para accionar el mandril de sujeción asignado a una máquina herramienta, es decir, para accionar las mordazas de sujeción. El empleo del dispositivo de sujeción eléctrico dado a conocer en el documento DE 10 2006 050 918 A1 en la práctica dio por resultado aspectos susceptibles de mejora en cuanto al control de carrera, puesto que la medición analógica de la longitud mediante el sensor empleado es relativamente inexacta. Fuera de ello es problemático que para el control de la fuerza de sujeción obtenida se utilice el par de giro del motor, lo que asimismo está asociado con una inexactitud relativamente alta. Finalmente el proceso de sujeción ha sido experimentado como demasiado lento.
Además el dispositivo de sujeción del documento US 4, 567, 794 muestra un procedimiento y un dispositivo según los preámbulos de las reivindicaciones 1 y 5 con un dispositivo de sujeción eléctrico, en el cual un árbol hueco es desplazable axialmente mediante el giro de una tuerca, arrastrando las mordazas de sujeción. Tan pronto como las mordazas de sujeción se apoyan en la herramienta o en la pieza de trabajo o agarran ésta, no se efectúa ningún desplazamiento axial más del árbol hueco. Si ahora la tuerca se hace girar de nuevo, tiene lugar un movimiento relativo de la tuerca con respecto al árbol hueco contra la fuerza de un anillo elastómero.
Sirve por eso de base al invento el problema de especificar un procedimiento con el que puedan ser evitados los susodichos problemas o que represente una alternativa a los procedimientos ya conocidos. El problema del invento es además proporcionar un dispositivo para la realización del procedimiento según el invento.
La parte del problema que se refiere al procedimiento es solucionada por el procedimiento mencionado al principio. Con este procedimiento está asociada la gran ventaja de que no sólo debe ser empleado un control del par de giro para la obtención de la fuerza de sujeción, sino que existe un control dependiente del recorrido, puesto que se efectúa un desplazamiento continuado de la barra roscada hasta que esté obtenida la diferencia de transmisor predeterminada. El proceso de sujeción en sí se desarrolla más rápidamente.
Otra ventaja del invento es que a la tuerca de husillo están asignados paquetes elásticos dispuestos en ambos lados, que son tensados en la generación de la diferencia de transmisor predeterminada. De este modo se obtiene un aumento de la seguridad de sujeción, puesto que los paquetes elásticos sirven como acumuladores de energía y contrarrestan un cambio de situación rápido de la barra roscada. La disposición en ambos lados de los paquetes elásticos hace que la barra roscada presente las mismas propiedades en ambas direcciones.
Bajo aspectos de seguridad es ventajoso que durante el estado de sujeción sea controlada la diferencia de transmisor, especialmente si la diferencia de transmisor se utiliza como magnitud de regulación para el mantenimiento automático de 45 la fuerza de sujeción, puesto que así durante la duración total de la sujeción de una pieza de trabajo o de una herramienta es posible un control del estado de sujeción bajo aspectos de seguridad. A este respecto se ofrece que una desviación de la diferencia de transmisor predeterminada sea comunicada al sistema de control de carrera, que en el mandril de sujeción sea conocida y pueda ser utilizada, en caso de desviaciones de un estado de sujeción seguro, emitir un mensaje o incluso provocar una frenada hasta la parada del mandril de sujeción.
La parte del problema que se refiere al dispositivo es solucionada por un dispositivo según la reivindicación 5, en lo cual está previsto un dispositivo de sujeción eléctrico con una carcasa que puede ser fijada en el husillo de trabajo de una máquina herramienta, y en la cual está alojada desplazable axialmente una barra roscada para el desplazamiento de las mordazas de sujeción de un mandril de sujeción, la cual es desplazable por medio de una tuerca de husillo sobre la cual actúa un motor de regulación eléctrico, cuyo motor está en conexión de accionamiento con la tuerca de husillo, porque la 55 tuerca de husillo está alojada axialmente entre dos paquetes elásticos, y porque a la barra roscada está asignado un primer sensor para el registro de posición y a la tuerca de husillo está asignado un segundo sensor para el registro de posición. Este dispositivo se distingue por su sencilla estructura de construcción, en la cual comparado con el estado de la
técnica conocido en esencia sólo deben ser completados los paquetes elásticos así como el segundo sensor, cuyas señales son aprovechadas para en comparación con el primer sensor determinar la diferencia de transmisor.
De nuevo en cuanto a la sencillez de la estructura es ventajoso que la tuerca de husillo esté unida mediante espigas de arrastre con un anillo de conmutación guiado fuera en la carcasa, al cual está asignado el segundo sensor, puesto que 5 una configuración semejante posibilita emplear las experiencias y piezas de construcción realizadas en sistemas de control de carrera conocidos.
Debe tenerse en cuenta que para el control del estado de sujeción no tiene que tenerse preparado ningún recorrido de desplazamiento grande para la tuerca de husillo dentro de la carcasa, es decir, la longitud de construcción de la carcasa puede conservarse en esencia sin modificar, puesto que es suficiente que a la tuerca de husillo dentro de la carcasa esté
asignado un recorrido de desplazamiento de 1, 5 mm a 5, 0 mm, preferentemente de 2, 0 a 3, 5 mm.
La necesidad de sitio para el dispositivo según el invento puede también limitarse porque en la tuerca de husillo están configurados espacios huecos para el alojamiento de los paquetes elásticos, sirviendo los espacios huecos al mismo tiempo también como guía para los paquetes elásticos.
A continuación el invento es explicado en detalle en un ejemplo de realización representado en el dibujo; muestran:
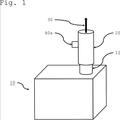
La Figura 1 una representación en perspectiva de un dispositivo de sujeción eléctrico con la carcasa que aloja a la barra roscada y a la tuerca de husillo así como el motor de regulación dispuesto lateralmente junto a la carcasa, la Figura 2 una representación en perspectiva del dispositivo de sujeción eléctrico de la Figura 1 en otra vista, la Figura 3 una vista frontal del dispositivo de sujeción eléctrico de la Figura 1, la Figura 4 una sección longitudinal a través del dispositivo de sujeción eléctrico de la Figura 1, la Figura 5 La sección V â?" V de la Figura 3, la Figura 6 una sección longitudinal a través de la mitad inferior de la carcasa de un dispositivo de sujeción eléctrico con plano de sección girado con respecto al de la Figura 5, la Figura 7 una representación esquemática en estado de reposo de la barra roscada y de la tuerca de husillo, y la Figura 8 una representación esquemática correspondiente a la de la Figura 7 para la explicación de la diferencia de transmisor... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para sujetar una herramienta o una pieza de trabajo por medio de un dispositivo de sujeción eléctrico (1) , que comprende una carcasa (2) fijada en el husillo de trabajo de una máquina herramienta y en la cual está alojada desplazable axialmente una barra roscada (3) para el desplazamiento de las mordazas de sujeción de un mandril de sujeción, y un motor de regulación eléctrico (4) , cuyo rotor está en conexión de accionamiento con una rueda de accionamiento (6) que desplaza a la tuerca de husillo (7) de la barra roscada (3) , estando asignado a la barra roscada (3) un primer sensor para el registro de su posición axial y estando asignado a la tuerca de husillo (7) un segundo sensor para el registro de su posición axial, comprendiendo el paso del procedimiento la determinación de la posición de la barra roscada (3) por medio del primer sensor al producirse una ligera fuerza axial debido al apoyo de las mordazas de sujeción en la herramienta o en la pieza de trabajo, y desplazamiento continuado de la tuerca de husillo (7) , hasta que por medio del segundo sensor esté establecida una diferencia de transmisor predeterminada (12) entre el primer sensor y el segundo sensor, caracterizado porque la tuerca de husillo (7) está alojada axialmente entre dos paquetes elásticos (8) , que son tensados en la generación de la diferencia de transmisor predeterminada (12) .
2. Procedimiento según la reivindicación 1, caracterizado porque durante el estado de sujeción es controlada la diferencia de transmisor (12) .
3. Procedimiento según la reivindicación 2, caracterizado porque la diferencia de transmisor (12) se utiliza como magnitud de regulación para el mantenimiento automático de la fuerza de sujeción.
4. Procedimiento según la reivindicación 2 o 3, caracterizado porque una desviación de la diferencia de transmisor 20 predeterminada (12) es comunicada al sistema de control de carrera.
5. Dispositivo para la realización del procedimiento según una de las reivindicaciones 1 a 4, en el cual está previsto un dispositivo de sujeción eléctrico (1) con una carcasa (2) que puede ser fijada en el husillo de trabajo de una máquina herramienta, y en la cual está alojada desplazable axialmente una barra roscada (3) para el desplazamiento de las mordazas de sujeción de un mandril de sujeción, la cual es desplazable por medio de una tuerca de husillo (7) , sobre la cual actúa un motor de regulación eléctrico (4) cuyo rotor está en conexión de accionamiento con la tuerca de husillo (7) , y a la barra roscada (3) está asignado un primer sensor para el registro de posición y a la tuerca de husillo (7) está asignado un segundo sensor para el registro de posición, caracterizado porque la tuerca de husillo (7) está alojada axialmente entre dos paquetes elásticos (8) .
6. Dispositivo según la reivindicación 5, caracterizado porque la tuerca de husillo (7) está unida mediante espigas de arrastre (10) con un anillo de conmutación (11) guiado fuera en la carcasa (2) , al cual está asignado el segundo sensor.
7. Dispositivo según la reivindicación 5 o 6, caracterizado porque a la tuerca de husillo (7) dentro de la carcasa (2) está asignado un recorrido de desplazamiento de 1, 5 mm a 5, 0 mm, preferentemente de 2, 0 mm a 3, 5 mm.
8. Dispositivo según una de las reivindicaciones 5 a 7, caracterizado porque en la tuerca de husillo (7) están 35 configurados espacios huecos (9) para el alojamiento de los paquetes elásticos (8) .
Patentes similares o relacionadas:
Unidad de máquina herramienta con control de excentricidad axial y procedimiento de prueba para el estado de sujeción, del 18 de Diciembre de 2019, de Franz Kessler GmbH: Unidad de máquina herramienta motorizada con una unidad de estator y una unidad de rotor giratoria alrededor de un eje de rotación, en donde […]
Procedimiento para monitorizar la concentricidad de una herramienta de una máquina herramienta NC y máquina herramienta NC con control de concentricidad, del 30 de Octubre de 2019, de SCHWABISCHE WERKZEUGMASCHINEN GMBH: Procedimiento para monitorizar la concentricidad de una herramienta de una máquina herramienta NC , que puede rotar alrededor del eje […]
Dispositivo y procedimiento para posicionar un elemento de sujeción, del 23 de Octubre de 2019, de HOMAG GmbH: Dispositivo para posicionar un elemento de sujeción, que está previsto para fijar una pieza de trabajo en una estación de mecanizado, presentando el […]
 Máquina de mecanizado con dispositivo de medición así como procedimiento, del 25 de Septiembre de 2019, de HOMAG GmbH: Máquina de mecanizado para piezas de trabajo preferiblemente en forma de placa, que están compuestas en particular, al menos parcialmente, de madera, materiales […]
Máquina de mecanizado con dispositivo de medición así como procedimiento, del 25 de Septiembre de 2019, de HOMAG GmbH: Máquina de mecanizado para piezas de trabajo preferiblemente en forma de placa, que están compuestas en particular, al menos parcialmente, de madera, materiales […]
Dispositivo y procedimiento para trabajo mecánico, del 17 de Julio de 2019, de BISIACH & CARRU'S.P.A.: Cabezal de trabajo para robots industriales, que comprende: - un husillo que comprende una herramienta , estando conectado dicho husillo a un carro […]
Procedimiento y dispositivo para aplicar un fluido sobre una superficie de un componente, del 3 de Abril de 2019, de Drei Bond GmbH: Procedimiento para aplicar un fluido sobre una superficie de un componente , donde el componente se dispone en una pluralidad de alojamientos del componente […]
Dispositivo para la vigilancia de la posición de una herramienta o de un portaherramientas en un husillo de trabajo, del 13 de Junio de 2018, de OTT-JAKOB SPANNTECHNIK GMBH: Dispositivo para la vigilancia de la posición de una herramienta o de un portaherramientas en un husillo de trabajo , en particular en una máquina de mecanización, […]
Aparato de ajuste de herramienta y medición, del 19 de Julio de 2017, de E. Zoller GmbH & Co. KG Einstell- und Messgeräte: Sistema con un aparato de ajuste de herramienta y medición para medir una unidad de herramienta , con al menos un dispositivo de cámara que […]