PROCEDIMIENTO DE MEDIDA DE HOLGURAS Y DESNIVELES.
Procedimiento de medida de holguras y de desniveles entre dos piezas (20,
22, 24) que tienen los bordes respectivos enfrentados, que comprende las etapas siguientes tendentes a: - proyectar en las superficies de las piezas al menos una línea luminosa (26) que corte dichos bordes de las piezas en el lugar de la línea que hay que medir; - obtener con dos ángulos visuales distintos al menos dos imágenes de dicha línea luminosa con la ayuda de al menos un par de cámaras (18), captando cada cámara al menos una imagen de la línea luminosa; caracterizado por que comprende las siguientes etapas: - determinar directa o indirectamente en cada imagen obtenida el valor representativo de la holgura y/o del desnivel en la marca de referencia bidimensional correspondiente de la imagen, pudiendo las líneas de borde de las piezas haber sido previamente determinadas a partir de imágenes obtenidas con una iluminación difusa; - determinar por un procedimiento estereoscópico la posición de la línea que hay que medir en el sistema de referencia de un par de cámaras, después deducir la posición y la orientación de cada una de las cámaras de este par en el sistema de referencia local de la línea que hay que medir; - corregir para cada imagen el valor representativo obtenido anteriormente de la holgura y/o del desnivel en función de la posición y de la orientación de cada cámara en el sistema de referencia local de la holgura y el desnivel que hay que medir, por aplicación de una función de las coordenadas esféricas de posición y de orientación de cada una de dichas cámaras, función cuyos parámetros se determinan matemáticamente a partir de la posición y de la orientación de la línea que hay que medir en la marca de referencia del par estereoscópico, a fin de obtener, para cada imagen captada por cada cámara, un valor verdadero de la holgura y/o del desnivel
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09179332.
Solicitante: PEUGEOT CITROEN AUTOMOBILES SA.
Nacionalidad solicitante: Francia.
Dirección: ROUTE DE GISY 78140 VELIZY-VILLACOUBLAY FRANCIA.
Inventor/es: Calve,Gilbert.
Fecha de Publicación: .
Fecha Solicitud PCT: 15 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- B62D65/00G
- G01B11/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la distancia o la separación entre objetos espaciados o entre aberturas espaciadas (G01B 11/26 tiene prioridad; telémetros G01C 3/00).
- G01B11/25B
Clasificación PCT:
- G01B11/14 G01B 11/00 […] › para la medida de la distancia o la separación entre objetos espaciados o entre aberturas espaciadas (G01B 11/26 tiene prioridad; telémetros G01C 3/00).
- G01B11/25 G01B 11/00 […] › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2362262_T3.pdf

Fragmento de la descripción:
Procedimiento de medida de holguras y desniveles.
El presente invento se refiere a un procedimiento de medida destinado más particularmente a la medida de holguras y de desniveles entre las piezas de carrocería que tienen los respectivos bordes enfrentados.
El control de la conformidad de las holguras y desniveles en los vehículos automóviles es un objetivo importante para los fabricantes ya que contribuye decisivamente a la percepción por parte de los clientes de la calidad en la fabricación de los vehículos.
Actualmente, con el fin de medir las holguras y desniveles, se han aplicado tecnologías diferentes, especialmente de la visión. En los documentos FR 2.756.626 y US 5.129.010 se describen soluciones que utilizan sistemas portátiles.
La patente EP0845656 expone un sistema de medida de holguras y de desnivel por triangulación óptica que proyecta dos planos luminosos paralelos sobre las piezas que caracterizar a fin de crear dos líneas de brillo de alta intensidad. La patente US6529283 se refiere a un dispositivo pensado para medir la anchura de una separación entre dos piezas, estando esta separación delimitada por un borde de cada una de las dos piezas. El principio se basa en una irradiación luminosa de esta zona de separación, y después en la recuperación de la luz reflejada por dichos bordes, estando las fuentes luminosas y los medios de detección de la luz reflejada situados de forma optimizada. Finalmente, la publicación de Kosmopoulos y otros, intitulada "automated inspection of gaps on the automobile production line through stereo vision and specular reflection", COMPUTERS IN INDUSTRY, ELSEVIER SCIENCE PUBLISHERS. AMSTERDAM, NL, vol. 46, nº 1, agosto 2001 (2001-08-01), páginas 49-63, XP0042987961SSN; 0166-3615, describe un método que permite mediante visión estereoscópica medir holguras y desniveles entre la estructura de un vehículo automóvil y diferentes elementos de la carrocería, como por ejemplo puertas y capó, aptos para ser montados en dicha carrocería.
Sin embargo, la utilización de pistolas portátiles implica la realización de medidas fuera del flujo de producción y estos sistemas resultan poco prácticos para una utilización unitaria en la cadena de producción, y su empleo está por tanto limitado a operaciones de control mediante toma de muestras en la cadena de producción.
Para la realización de medidas automáticas y unitarias en la cadena de producción conviene recurrir a estaciones de medida equipadas con captadores fijos o captadores colocados en brazos de robots, por ejemplo.
Los sistemas de medida óptica de holguras y desniveles pueden utilizar dos tipos de tecnología visual, o sea una tecnología monovisión por triangulación o una tecnología de visión estereoscópica.
La medida por visión se basan en el análisis de una o varias imágenes obtenidas con la ayuda de una o varias cámaras. Cada línea en la que se desee medir una holgura y desnivel es mostrada por un dispositivo de iluminación que emite una o varias rayas de luz láser proyectadas radialmente en el acoplamiento que hay que medir.
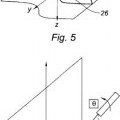
En el perfil luminoso obtenido en una imagen dada un conjunto de algoritmos permite determinar los puntos característicos de los segmentos del perfil observado y una combinación de proyecciones permite cuantificar las separaciones que representan la holgura y el desnivel.
En un procedimiento monovisión por triangulación el dispositivo de emisión de luz y la cámara están integrados en una caja con objeto de formar un captador. Los ángulos entre los diferentes elementos están determinados previamente por construcción y permiten corregir los valores de holgura y de desnivel leídos en la imagen obtenida con el fin de determinar los verdaderos valores de holgura y de desnivel.
En la práctica se intenta situar dicho captador de forma que el eje óptico de la cámara sea sensiblemente perpendicular a la línea formada por la intersección de las superficies de las piezas en acoplamiento y el plano luminoso lamelar. De este modo el valor de la holgura visto por la cámara es sensiblemente igual al valor verdadero de dicha holgura.
Por el contrario, el eje óptico de la cámara está necesariamente inclinado un cierto ángulo con respecto al plano luminoso lamelar. Debido a esto el valor del desnivel visto por la cámara debe ser corregido para determinar el valor verdadero de dicho desnivel.
En un procedimiento clásico de medida por visión estereoscópica la línea que hay que medir es mostrada por un dispositivo de iluminación adicional, siendo dicha línea observada por dos cámaras con un campo visual débil, por tanto dedicadas a una línea particular.
De manera general la colocación de las cámaras se realiza de forma específica para cada una de ellas, y necesita en el lugar la ejecución de un procedimiento de calibrado de cada par de cámaras.
En su principio la visión estereoscópica permite determinar las coordenadas tridimensionales de un punto en el sistema de referencia del par estereoscópico si el punto considerado está visto perfectamente por las dos cámaras.
A partir de las coordenadas tridimensionales calculadas por los puntos importantes que definen la holgura y el desnivel se determina mediante cálculos la distancia entre estos puntos, el valor de dicha holgura y de dicho desnivel.
No obstante, el procedimiento estereoscópico clásico aumenta mucho la dispersión de las medidas. En efecto, los valores de holgura y de desnivel son distancias, por tanto son medidas relativas no determinadas por lectura directa sino obtenidas mediante cálculos a partir de las coordenadas absolutas de los puntos importantes. La medida de las coordenadas de los puntos está sometida a una incertidumbre de la misma. El cálculo de la distancia entre los puntos implica la acumulación de estas imprecisiones de medidas en las coordenadas de cada punto.
Por otra parte se observará que el sistema por visión estereoscópica requiere dos cámaras por cada línea que hay que medir así como un sistema de sincronización de obtención de imágenes.
Por tanto, existe la necesidad de un procedimiento fiable de medida de la holgura y del desnivel que dé una incertidumbre de medida baja y que pueda ser utilizado en una estación situada en la cadena de producción para realizar las medidas en vehículos en movimiento.
Para conseguir esto el presente invento se refiere a un procedimiento de medida de holguras y desniveles entre dos piezas que tienen los respectivos bordes enfrentados, caracterizado por que comprende las siguientes etapas tendentes a:
- proyectar en las superficies de las piezas al menos una línea luminosa que corta dichos bordes de las piezas en el lugar de la línea que hay que medir;
- obtener al menos dos imágenes de dicha línea luminosa con la ayuda de al menos un par de cámaras;
- determinar directa o indirectamente en cada imagen obtenida el valor representativo de la holgura y/o del desnivel en la marca de referencia bidimensional correspondiente de la imagen, pudiendo haber sido previamente determinadas las líneas de borde de las piezas a partir de imágenes obtenidas con una iluminación difusa;
- determinar por un procedimiento estereoscópico la posición de la línea que hay que medir en el sistema de referencia de un par de cámaras, después deducir la posición y la orientación de cada una de las cámaras de este par en el sistema de referencia local de la línea que hay que medir;
- corregir el valor así obtenido de la holgura y/o del desnivel en función de la posición y de la orientación de cada cámara en el sistema de referencia local de la holgura y del desnivel que hay que medir con objeto de obtener un valor verdadero de la holgura y/o del desnivel.
De este modo, procediendo a una lectura directa de la distancia representativa de la holgura y/o del desnivel considerados en cada imagen antes de corregir esta distancia para obtener el valor verdadero, se evita cualquier aumento de la dispersión en dicha medida.
En efecto, dado que el procedimiento según el invento no calcula las coordenadas tridimensionales de puntos representativos antes de calcular la distancia entre estos puntos sino que procede directamente a la lectura de la distancia bidimensional antes de corregir su valor, no existe esta acumulación de imprecisiones de medida en cada coordenada de cada punto... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de medida de holguras y de desniveles entre dos piezas (20, 22, 24) que tienen los bordes respectivos enfrentados, que comprende las etapas siguientes tendentes a:
- proyectar en las superficies de las piezas al menos una línea luminosa (26) que corte dichos bordes de las piezas en el lugar de la línea que hay que medir;
- obtener con dos ángulos visuales distintos al menos dos imágenes de dicha línea luminosa con la ayuda de al menos un par de cámaras (18), captando cada cámara al menos una imagen de la línea luminosa;
caracterizado por que comprende las siguientes etapas:
- determinar directa o indirectamente en cada imagen obtenida el valor representativo de la holgura y/o del desnivel en la marca de referencia bidimensional correspondiente de la imagen, pudiendo las líneas de borde de las piezas haber sido previamente determinadas a partir de imágenes obtenidas con una iluminación difusa;
- determinar por un procedimiento estereoscópico la posición de la línea que hay que medir en el sistema de referencia de un par de cámaras, después deducir la posición y la orientación de cada una de las cámaras de este par en el sistema de referencia local de la línea que hay que medir;
- corregir para cada imagen el valor representativo obtenido anteriormente de la holgura y/o del desnivel en función de la posición y de la orientación de cada cámara en el sistema de referencia local de la holgura y el desnivel que hay que medir, por aplicación de una función de las coordenadas esféricas de posición y de orientación de cada una de dichas cámaras, función cuyos parámetros se determinan matemáticamente a partir de la posición y de la orientación de la línea que hay que medir en la marca de referencia del par estereoscópico, a fin de obtener, para cada imagen captada por cada cámara, un valor verdadero de la holgura y/o del desnivel.
2. Procedimiento según la reivindicación 1, caracterizado por que un valor verdadero de la holgura y/o del desnivel se obtiene por promediado de los dos valores verdaderos procedentes de las dos imágenes obtenidas por un par de cámaras (18).
3. Procedimiento según una cualquiera de las reivindicaciones 1 ó 2, caracterizado por que cada una de las cámaras (18) obtiene una pluralidad de imágenes.
4. Procedimiento según la reivindicación 3, caracterizado por que los valores de las holguras y de los desniveles obtenidos pueden ser promediados antes o después de la corrección en la marca de referencia óptica correspondiente.
5. Procedimiento según una cualquiera de las reivindicaciones 1 a 4, caracterizado por que el campo visual y la resolución de las cámaras se elegirán de forma que varias líneas que hay que medir puedan ser visibles dentro de una misma imagen.
6. Procedimiento según una cualquiera de las reivindicaciones 1 a 5, caracterizado por que se obtienen imágenes con la ayuda de al menos tres cámaras (18) que forman al menos tres pares estereoscópicos diferentes.
7. Procedimiento según la reivindicación 6, caracterizado por que se obtienen imágenes con la ayuda de al menos cuatro cámaras (18) que forman al menos seis pares estereoscópicos diferentes.
8. Procedimiento según una cualquiera de las reivindicaciones 1 a 7, caracterizado por que los valores verdaderos obtenidos lo son por promediado de los valores verdaderos procedentes de pares estereoscópicos diferentes, pudiendo ser obtenidos o no por promediado de los valores procedentes de una pluralidad de imágenes.
Patentes similares o relacionadas:
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método: la introducción de datos del modelo asociado con la pieza de trabajo […]
Detección y posicionamiento de aplicador de muestras, del 1 de Enero de 2020, de Roche Diagnostics Hematology, Inc: Un procedimiento para situar un aplicador de muestras con respecto a un sustrato , comprendiendo el procedimiento: obtener una imagen […]
Ensamblador de jeringa y método de uso, del 6 de Noviembre de 2019, de Fisher Clinical Services GmbH: Un método para ensamblar una jeringa, el método comprende: soportar un cuerpo cilíndrico de la jeringa que limita con un compartimiento que se extiende […]
Dispositivo de medición de huecos y método de medición de huecos, del 23 de Octubre de 2019, de MITSUBISHI HEAVY INDUSTRIES, LTD.: Un dispositivo de medición de huecos que está configurado para medir un hueco (G) entre una placa superior y una placa inferior […]
Procedimiento y dispositivo de control para equipo de motor, del 7 de Agosto de 2019, de PELLENC: Dispositivo de control para un equipo de motor, que comprende al menos un sensor y una tarjeta electrónica de control del equipo en función de […]
Disposición de rampa con característica de extracción, del 17 de Mayo de 2019, de BECKMAN COULTER, INC.: Elemento adaptado para liberar un objeto agarrado por una unidad de agarre, en el que dicha unidad de agarre incluye una pluralidad […]
PROCEDIMIENTO NO INVASIVO PARA DETERMINAR DENSIDAD DE CONDUCTOS Y/O FIBRAS DE CAMÉLIDOS SUDAMERICANOS Y OTROS ANIMALES, Y MICROSCOPIO PARA LLEVAR A CABO EL PROCEDIMIENTO, del 25 de Abril de 2019, de QUISPE PENA, Edgar Carlos: El presente invento se refiere al procedimiento no invasivo para determinar densidad de conductos y fibras de camélidos sudamericanos y otros animales, y un microscopio […]
Dispositivo óptico de medición de posición, del 20 de Marzo de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo óptico de medición de posición para medir la posición relativa entre dos objetos que se mueven uno respecto a otro en la dirección […]