DISPOSITIVOS QUIRÚRGICOS ENDOSCÓPICOS.
Dispositivo quirúrgico endoscópico (100) que comprende un conjunto de mango (300) que define un eje longitudinal,
incluyendo el conjunto de mango (300): una junta de articulación (330) configurada para la inclinación omnidireccional fuera de eje del conjunto de mango con relación al eje longitudinal; un collar de rotación (340) configurado para la rotación alrededor del eje longitudinal; y un elemento de accionamiento (350) configurado para traslación axial a lo largo del eje longitudinal; un conjunto de tubo (200) soportado funcionalmente sobre el conjunto de mango (300) y que se extiende desde el mismo, incluyendo el conjunto de tubo (200): un tubo exterior fijo (210); y un vástago interior dispuesto de manera deslizante y giratoria en el tubo exterior (210); en el que el vástago interior está conectado al collar (340) y al elemento de accionamiento (350) de tal manera que la rotación del collar (340) dé como resultado la rotación del vástago interior y la traslación axial del elemento de accionamiento (350) dé como resultado la traslación axial del vástago interior; un conjunto de articulación (230) soportado funcionalmente sobre un extremo distal del conjunto de tubo (200) y que se extiende desde el mismo, en el que el conjunto de articulación (200) está configurado para articulación omnidireccional concomitante con la inclinación omnidireccional de la junta de articulación (330); y un conjunto de herramienta (250) soportado funcionalmente sobre un extremo distal del conjunto de articulación (230) y que se extiende desde el mismo, en el que un extremo distal del vástago interior está conectado al conjunto de herramienta (250) de tal manera que la traslación axial del vástago interior dé como resultado una primera operación del conjunto de herramienta (250) y la rotación del vástago interior dé como resultado una segunda operación del conjunto de herramienta (250)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08252797.
Solicitante: TYCO HEALTHCARE GROUP LP.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 60 MIDDLETOWN AVENUE NORTH HAVEN, CT 06473 ESTADOS UNIDOS DE AMERICA.
Inventor/es: DESANTIS, ROBERT, Wingardner,Thomas, Ceniccola,Anthony.
Fecha de Publicación: .
Fecha Solicitud PCT: 22 de Agosto de 2008.
Clasificación PCT:
- A61B1/008 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 1/00 Instrumentos para proceder al examen médico de las cavidades o conductos del cuerpo por inspección visual o fotográfica, p. ej. endoscopios (examen de las cavidades o conductos del cuerpo utilizando ondas ultrasónicas, sónicas o infrasónicas A61B 8/12; instrumentos endoscópicos para la toma de muestras celulares o para biopsias A61B 10/04; con fines quirúrgicos A61B 17/00; instrumentos quirúrgicos endoscópicos A61B 17/94; instrumentos quirúrgicos que utilizan un haz láser dirigido a lo largo o a través de un conducto flexible A61B 18/22 ); Dispositivos de iluminación al efecto (para los ojos A61B 3/00). › Articulaciones.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356497_T3.pdf
Fragmento de la descripción:
Referencia cruzada a una solicitud relacionada
La presente solicitud reivindica los derechos y la prioridad de la solicitud provisional US nº de Serie 60/965.857, presentada el 23 de agosto de 2007.
ANTECEDENTES 5
1. Campo técnico
La presente exposición se refiere a dispositivos quirúrgicos endoscópicos y, más particularmente, a agarraderas quirúrgicas endoscópicas y similares capaces de alcanzar una multitud de grados de funcionamiento y/o movimiento.
2. Antecedentes de la técnica relacionada 10
La cirugía endoscópica es una cirugía realizada intracorporalmente sin requerir una incisión grande. La cirugía endoscópica se realiza típicamente insertando una serie de lumbreras a través de pequeñas incisiones en la piel del paciente para acceder al sitio quirúrgico. Una de las lumbreras recibe un endoscopio, que es un dispositivo similar a una cámara de vídeo. El cirujano ve el sitio quirúrgico a través del endoscopio y realiza la cirugía insertando diversos dispositivos quirúrgicos a través de las lumbreras en el paciente. Esto evita que tenga que “abrir” al paciente, dando 15 como resultado una cirugía menos invasiva que las intervenciones convencionales. Dicho dispositivo quirúrgico incluye una agarradera endoscópica accionada manualmente.
En un esfuerzo por reducir el número de incisiones realizadas en el paciente, se están llevando a cabo intervenciones de incisión única y dispositivos quirúrgicos relacionados. Por lo tanto, es deseable proporcionar dispositivos quirúrgicos capaces de alcanzar una multitud de grados de funcionamiento. 20
En consecuencia, existe la necesidad de proporcionar unos dispositivos quirúrgicos que incluyan múltiples grados de funcionamiento y grados de movimiento.
La patente US nº 6.666.854 describe un instrumento quirúrgico endoscópico que incluye un mango y un conjunto de control. El conjunto de control presenta una corona esférica encerrada por una cubierta cónica que se extiende hacia dentro y que define una holgura cónica. El conjunto de control tiene un centro y un eje de revolución. La 25 manipulación del conjunto de control produce articulación de una parte distal que contiene una herramienta. La articulación de la parte distal tiene lugar alrededor de una junta de articulación. La posición del único elemento de control delante del mango es ergonómica y refleja los controles de rotación simples existentes en los instrumentos de línea recta rígidos disponibles en el mercado y utilizados habitualmente por cirujanos.
SUMARIO 30
La presente exposición se refiere a dispositivos quirúrgicos endoscópicos, incluyendo agarraderas y similares, capaces de alcanzar una multitud de grados de funcionamiento y/o movimiento.
Según un aspecto de la presente exposición, se proporciona un dispositivo quirúrgico endoscópico que incluye un conjunto de mango; un conjunto de tubo funcionalmente soportado sobre el conjunto de mango y que se extiende desde el mismo, definiendo el conjunto de tubo un eje longitudinal; un conjunto de articulación soportado 35 funcionalmente sobre un extremo distal del conjunto de tubo y que se extiende desde el mismo; y un conjunto de herramienta funcionalmente soportado sobre un extremo distal del conjunto de articulación y que se extiende desde el mismo. El conjunto de mango está conectado al conjunto de herramienta de tal manera que una rotación del conjunto de mango alrededor del eje longitudinal da como resultado una rotación concomitante del conjunto de herramienta. El conjunto de mango está conectado al conjunto de herramienta, de tal manera que un accionamiento del conjunto de 40 mango de una manera particular dé como resultado una actuación concomitante del conjunto de herramienta. El conjunto de mango está conectado al conjunto de herramienta de tal manera que un pivotamiento del conjunto de mango en cualquier dirección fuera de eje con relación al eje longitudinal dé como resultado una articulación concomitante del conjunto de herramienta a través del conjunto de articulación.
El conjunto de tubo puede incluir un tubo exterior y un vástago interior soportado en el tubo exterior, en donde 45 el vástago interior es capaz de rotación y traslación con relación al tubo exterior. El conjunto de mango puede incluir un collar conectado al vástago interior, en el que una rotación del collar da como resultado una rotación concomitante del vástago.
El conjunto de herramienta puede conectarse a un extremo distal del vástago interior de tal manera que la rotación del collar dé como resultado la rotación concomitante del conjunto de herramienta. 50
El conjunto de articulación puede incluir una pluralidad de juntas conectadas funcionalmente entre sí, incluyendo la pluralidad de juntas por lo menos un nudillo que permite articulación en una primera dirección transversal con relación al eje longitudinal, y por lo menos un nudillo que permite articulación en una segunda dirección transversal
con relación al eje longitudinal. Dicho por lo menos un nudillo que permite articulación en una primera dirección y el por lo menos un nudillo que permite articulación en una segunda dirección pueden orientarse de manera sustancialmente ortogonal entre sí.
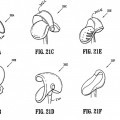
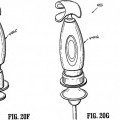
El conjunto de mango puede incluir una junta de rótula configurada para articulación radial en cualquier dirección alrededor del eje longitudinal y una pluralidad de cables de articulación, teniendo cada uno un primer extremo 5 conectado a la junta de rótula y teniendo cada uno un segundo extremo que se extiende a través del conjunto de tubo y el conjunto de articulación y conectado al conjunto de herramienta. En uso, la inclinación del conjunto de mango alrededor de la junta de rótula con relación al eje longitudinal puede dar como resultado una articulación concomitante del conjunto de herramienta.
Pueden disponerse por lo menos cuatro cables de articulación uniformemente espaciados alrededor de un eje 10 central del conjunto de tubo. En uso, cuando el mango es inclinado fuera de eje, la junta de rótula ejerce una fuerza en una dirección proximal sobre por lo menos uno de dicha pluralidad de cables de articulación, que da como resultado la articulación concomitante del conjunto de herramienta.
El conjunto de herramienta puede incluir un par de mordazas yuxtapuestas. Un extremo distal del vástago interior puede conectarse funcionalmente a las mordazas de tal manera que un movimiento en vaivén del vástago 15 interior con relación al tubo exterior puede dar como resultado una apertura y un cierre de las mordazas, y una rotación del vástago interior con relación al tubo exterior puede dar como resultado una rotación de las mordazas.
Cada mordaza puede definir una ranura de leva en la misma. El conjunto de herramienta puede incluir una espiga de leva deslizablemente dispuesta dentro de cada ranura de leva definida en las mordazas. La espiga de leva puede conectarse al vástago interior de tal manera que la traslación del vástago interior dé como resultado la traslación 20 de la espiga de leva a través de las ranuras de leva.
El conjunto de mango puede incluir además un accionador conectado al vástago interior. En uso, la actuación del accionador puede dar como resultado la traslación del vástago interior con relación al tubo exterior.
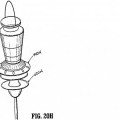
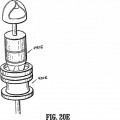
El conjunto de mango puede incluir un elemento enchavetado asegurado al vástago interior y que define por lo menos un surco que se extiende longitudinalmente, y en donde el collar puede incluir por lo menos una guía 25 correspondiente que sobresale hacia dentro de un surco respectivo del elemento enchavetado. En uso, la rotación del collar puede impartir rotación al elemento enchavetado y al vástago interior, y pudiendo ser axialmente trasladables el elemento enchavetado y el vástago interior con relación al collar.
El conjunto de mango puede incluir un carrete que define un lumen central a su través y un lumen decalado para cada uno de dicha pluralidad de cables de articulación. El carrete puede definir una superficie proximal cóncava 30 configurada para acoplamiento con la junta de rótula. El carrete puede definir una superficie exterior anular cóncava.
El vástago interior puede doblarse y puede ser capaz de transmitir fuerzas rotacionales y fuerzas axiales.
Según otro aspecto de la presente exposición, se proporciona un dispositivo quirúrgico... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo quirúrgico endoscópico (100) que comprende
un conjunto de mango (300) que define un eje longitudinal, incluyendo el conjunto de mango (300):
una junta de articulación (330) configurada para la inclinación omnidireccional fuera de eje del conjunto de mango con relación al eje longitudinal; 5
un collar de rotación (340) configurado para la rotación alrededor del eje longitudinal; y
un elemento de accionamiento (350) configurado para traslación axial a lo largo del eje longitudinal;
un conjunto de tubo (200) soportado funcionalmente sobre el conjunto de mango (300) y que se extiende desde el mismo, incluyendo el conjunto de tubo (200):
un tubo exterior fijo (210); y 10
un vástago interior dispuesto de manera deslizante y giratoria en el tubo exterior (210);
en el que el vástago interior está conectado al collar (340) y al elemento de accionamiento (350) de tal manera que la rotación del collar (340) dé como resultado la rotación del vástago interior y la traslación axial del elemento de accionamiento (350) dé como resultado la traslación axial del vástago interior;
un conjunto de articulación (230) soportado funcionalmente sobre un extremo distal del conjunto de tubo (200) 15 y que se extiende desde el mismo, en el que el conjunto de articulación (200) está configurado para articulación omnidireccional concomitante con la inclinación omnidireccional de la junta de articulación (330); y
un conjunto de herramienta (250) soportado funcionalmente sobre un extremo distal del conjunto de articulación (230) y que se extiende desde el mismo, en el que un extremo distal del vástago interior está conectado al conjunto de herramienta (250) de tal manera que la traslación axial del vástago interior dé como resultado una primera 20 operación del conjunto de herramienta (250) y la rotación del vástago interior dé como resultado una segunda operación del conjunto de herramienta (250).
2. Dispositivo quirúrgico endoscópico (100) según la reivindicación 1, en el que el collar de rotación (340) incluye un elemento enchavetado (348) dispuesto en el mismo y en el que el collar (340) y el elemento enchavetado (349) están conectados entre sí, de tal manera que la rotación del collar (340) transmita la rotación al elemento 25 enchavetado (348) y de tal manera que el elemento enchavetado (348) pueda desplazarse axialmente con relación al collar (340).
3. Dispositivo quirúrgico endoscópico (100) según la reivindicación 1 ó 2, en el que el vástago interior está conectado al elemento enchavetado (348) y al elemento de accionamiento (350).
4. Dispositivo quirúrgico endoscópico (100) según cualquiera de las reivindicaciones anteriores, en el que el 30 conjunto de articulación (230) incluye una pluralidad de juntas (232, 234) conectadas funcionalmente entre sí, incluyendo la pluralidad de juntas (232, 234) incluye por lo menos un nudillo (232a, 234a) que permite articulación en una primera dirección transversal con relación al eje longitudinal, y por lo menos un nudillo (232a, 234a) que permite articulación en una segunda dirección transversal con relación al eje longitudinal.
5. Dispositivo quirúrgico endoscópico (100) según la reivindicación 4, en el que el por lo menos un nudillo 35 (232a, 234a) que permite la articulación en una primera dirección y dicho por lo menos un nudillo (232a, 234a) que permite la articulación en una segunda dirección están orientadas de manera sustancialmente ortogonal entre sí.
6. Dispositivo quirúrgico endoscópico (100) según cualquiera de las reivindicaciones anteriores, en el que la junta de articulación (330) es una junta de rótula y el conjunto de mango (300) incluye una pluralidad de cables de articulación (240), presentando cada uno de ellos un primer extremo conectado a la junta de rótula (330) y presentando 40 cada uno de ellos un segundo extremo que se extiende de manera deslizante a través del conjunto de tubo (200) y el conjunto de articulación (230) y que está conectado al conjunto de herramienta (200), dando como resultado la inclinación del conjunto de mango (300) en cualquier dirección alrededor de la junta de rótula (330) con relación al eje longitudinal la articulación concomitante del conjunto de herramienta (200).
7. Dispositivo quirúrgico endoscópico (100) según cualquiera de las reivindicaciones anteriores, en el que 45 por lo menos cuatro cables de articulación uniformemente espaciados (240) están dispuestos alrededor de un eje central del conjunto de tubo (200).
8. Dispositivo quirúrgico endoscópico (100) según las reivindicaciones 6 ó 7, en el que, cuando el mango (300) es inclinado fuera de eje, la junta de rótula (330) ejerce una fuerza en una dirección proximal sobre por lo menos uno de entre dicha pluralidad de cables de articulación (240), que da como resultado la articulación concomitante del 50 conjunto de herramienta (200).
9. Dispositivo quirúrgico endoscópico (100) según cualquiera de las reivindicaciones anteriores, en el que el conjunto de herramienta (200) incluye un par de mordazas yuxtapuestas (262, 264), estando conectado un extremo distal del vástago interior funcionalmente a las mordazas (262, 264), de tal manera que un movimiento en vaivén del vástago interior con relación al tubo exterior (210) dé como resultado una apertura y un cierre de las mordazas (262, 264), y una rotación del vástago interior con relación al tubo exterior (210) dé como resultado una rotación de las 5 mordazas (262, 264).
10. Dispositivo quirúrgico endoscópico (100) según la reivindicación 9, en el que cada mordaza (262, 264) define una ranura de leva en la misma y en el que una espiga de leva está dispuesta de manera deslizante dentro de cada ranura de leva definida en las mordazas (262, 264), y en el que la espiga de leva está conectada al vástago interior de tal manera que la traslación del vástago interior dé como resultado la traslación del pasador de leva a través 10 de las ranuras de leva.
11. Dispositivo quirúrgico endoscópico (100) según cualquiera de las reivindicaciones anteriores 2 a 10, en el que el elemento enchavetado (348) define por lo menos un surco exterior que se extiende longitudinalmente (348a), y en el que el collar incluye por lo menos una guía (346) correspondiente que sobresale hacia dentro de un respectivo surco (348a) del elemento enchavetado (348), en el que la rotación del collar (340) imparte rotación al elemento 15 enchavetado (348) y al vástago interior, y en el que el elemento enchavetado (348) y el vástago interior son axialmente trasladables con relación al collar (340).
12. Dispositivo quirúrgico endoscópico (100) según cualquiera de las reivindicaciones anteriores 6 a 11, en el que el conjunto de mango (300) incluye un carrete (320) que define un lumen central (322) a su través y un lumen decalado (326) para cada uno de dicha pluralidad de cables de articulación (240). 20
13. Dispositivo quirúrgico endoscópico (100) según la reivindicación 12, en el que el carrete (320) define una superficie proximal cóncava configurada para el acoplamiento con la junta de rótula (330).
14. Dispositivo quirúrgico endoscópico (100) según la reivindicación 12, en el que el carrete (320) define una superficie exterior anular cóncava.
15. Dispositivo quirúrgico endoscópico (100) según cualquiera de las reivindicaciones anteriores, en el que el 25 vástago interior puede doblarse y es capaz de transmitir fuerzas de rotación y fuerzas axiales.
Patentes similares o relacionadas:
Dispositivo médico orientable, del 16 de Noviembre de 2018, de Human Extensions Ltd: Dispositivo médico que comprende: un cuerpo de dispositivo alargado que incluye una parte orientable que puede orientarse dentro de un cuerpo de un sujeto […]
Dispositivo de sonda articulado extensible, del 6 de Diciembre de 2017, de CARNEGIE MELLON UNIVERSITY: Un dispositivo de sonda articulado que comprende: un primer mecanismo que comprende: un primer miembro de articulación posicionado en una zona proximal […]
Dispositivo de operación destinado especialmente a realizar una operación en el interior del cuerpo de un ser vivo, del 19 de Abril de 2017, de COLOPLAST A/S: Dispositivo de operación destinado especialmente a realizar una operación en el interior del cuerpo de un ser vivo, comprendiendo el dispositivo […]
 Disposición de articulación, del 6 de Agosto de 2014, de IMPERIAL INNOVATIONS LIMITED: Disposición de articulación que incluye un primer elemento de articulación, un elemento de transmisión y medios de accionamiento asociados al primer […]
Disposición de articulación, del 6 de Agosto de 2014, de IMPERIAL INNOVATIONS LIMITED: Disposición de articulación que incluye un primer elemento de articulación, un elemento de transmisión y medios de accionamiento asociados al primer […]
Dispositivo orientable con múltiples conexiones que tiene múltiples puertos de trabajo, del 9 de Abril de 2014, de CARNEGIE MELLON UNIVERSITY: Un dispositivo de múltiples conexiones orientable , que comprende un primer mecanismo con conexiones múltiples que comprende al menos tres conexiones […]