CONTROLES MANUALES PARA CARGADORES PEQUEÑOS.
Un vehículo de trabajo autopropulsado (10) que comprende: un bastidor (12) que tiene un eje longitudinal que se extiende hacia delante y hacia atrás entre una parte frontal y una parte posterior del bastidor (12);
una fuente de potencia o motriz (30) sobre el bastidor (12); un sistema de tracción (36A, 36B, 38, 40A, 40B) llevado sobre el bastidor para propulsar el bastidor (12) en sentido hacia delante y hacia atrás5 , en el que el sistema de tracción (36A, 36B, 38, 40A, 40B) comprende motores de accionamiento separados (36A, 36B) y un sistema de dirección (34, 78, 80, 100, 102) para orientar el bastidor (12); teniendo los motores de accionamiento (36A, 36B) palancas (120A, 120B) para controlar los motores (36A, 36B) y móviles desde una posición central de no accionamiento selectivamente en sentido hacia delante y hacia atrás; un sistema de control (34, 72, 94) para controlar y orientar el movimiento hacia delante y hacia atrás del vehículo (10), comprendiendo el sistema de control (34, 72, 94) una placa de soporte (72) montada pivotablemente alrededor de un primer eje erecto (82), una empuñadura de control (94) montada pivotablemente sobre la placa de soporte (72) alrededor de un segundo eje transversal (98), un enlace o articulación (102, 112, 116A, 116B) entre la placa de soporte (72) y los motores separados (36A, 36B, 38, 120A, 120B) y entre la empuñadura de control (94) y el sistema de tracción (36A, 36B, 38, 40A, 40B), controlando el enlace (102, 116A, 116B) los motores de accionamiento (36A, 36B) para accionar selectivamente los soportes sobre el suelo (40A, 40B) sobre lados opuestos del bastidor (12), incluyendo el enlace (102, 116A, 116B) una ménsula (102) móvil con la placa de soporte (72) alrededor del eje erecto (82) y hecha pivotar alrededor de un tercer eje transversal (106) diferente del segundo eje (98) y paralelo al mismo; una primera varilla (112) conectada entre la empuñadura de control (94) y la ménsula (102), y varillas móviles (116A, 116B) diferencialmente conectadas a la ménsula (102) y a las palancas (120A, 120B) respectivamente, proporcionando las varillas móviles diferencialmente (116A, 116B) entradas de orientación a las palancas (116A, 116B) cuando la placa de soporte (72) es hecha pivotar alrededor del eje erecto (82) y provocando selectivamente el movimiento hacia delante y hacia atrás del vehículo (10) cuando el pivotamiento de la empuñadura de control (94) alrededor del segundo eje (98) hace pivotar el soporte (102) alrededor del tercer eje (106)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2004/022550.
Solicitante: CLARK EQUIPMENT COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 200 CHESTNUT RIDGE ROAD WOODCLIFF LAKE, NJ 07675-8738 ESTADOS UNIDOS DE AMERICA.
Inventor/es: BARES, MARK F., WRIGHT,WILLIAM,A.
Fecha de Publicación: .
Fecha Solicitud PCT: 13 de Julio de 2004.
Clasificación Internacional de Patentes:
- E02F9/20A
Clasificación PCT:
- E02F9/20 CONSTRUCCIONES FIJAS. › E02 HIDRAULICA; CIMENTACIONES; MOVIMIENTO DE TIERRAS. › E02F DRAGADO; MOVIMIENTO DE TIERRAS (extracción de turba E21C 49/00). › E02F 9/00 Elementos constitutivos de las dragas o de los ingenios para el movimiento de tierras, no limitados a una de las categorías cubiertas por los grupos E02F 3/00 - E02F 7/00 (dispositivos de colocación o de recogida de cables eléctricos de arrastre B66C). › Mandos; Dispositivos de control (transmisión en general F16H; control en general G05; mandos para motores eléctricos múltiples H02K, H02P).
- G05G9/047 FISICA. › G05 CONTROL; REGULACION. › G05G DISPOSITIVOS O SISTEMAS DE CONTROL EN LA MEDIDA EN QUE SUS CARACTERISTICAS SON UNICAMENTE MECANICAS ("mecanismos "Bowden" o similares F16C 1/10; engranajes o mecanismos no especializados con este fin F16H; mecanismos de cambio de velocidad o de inversión para transmisiones que transmiten movimientos rotativos F16H 59/00 - F16H 63/00). › G05G 9/00 Mecanismos de control maniobrados a mano equipados de un solo órgano de control que trabajan con varios órganos controlados, p. ej. selectivamente, simultáneamente. › pudiendo ser accionado a mano el órgano de control alrededor de ejes ortogonales, p. ej. palancas de mando ("joysticks").
Clasificación antigua:
- E02F9/20 E02F 9/00 […] › Mandos; Dispositivos de control (transmisión en general F16H; control en general G05; mandos para motores eléctricos múltiples H02K, H02P).
- G05G9/047 G05G 9/00 […] › pudiendo ser accionado a mano el órgano de control alrededor de ejes ortogonales, p. ej. palancas de mando ("joysticks").
Países PCT: Alemania, España, Francia, Reino Unido, Italia.
Fragmento de la descripción:
ANTECEDENTES DEL INVENTO
El presente invento se refiere a controles manuales para controlar la dirección, sentido y velocidad de movimiento de un cargador mecánico o dispositivo cargador que puede ser propulsado por orugas, aunque los controles también funcionarán con dispositivos de carga accionados por ruedas así como otros 5 vehículos motorizados. Los controles operan accionamientos separados para lados opuestos del vehículo cuando la velocidad sobre un lado pueda ser variada con relación al otro lado para girar.
Se han avanzado distintos pequeños dispositivos de carga propulsados por orugas. Algunos de estos dispositivos de carga también incluyen desplazamiento sobre plataformas, y usualmente el cargador mecánico será del tipo que tiene brazos de elevación con una cuchara o cangilón u otro accesorio en el 10 extremo frontal de los brazos de elevación. El tren de accionamiento, particularmente cuando usa orugas en lados opuestos del cargador mecánico, incluye motores hidráulicos que son controlables tanto en dirección como en velocidad rotacional. Los controles del operario proporcionan el control individual de los motores en lados opuestos del cargador mecánico o vehículo de modo que la orientación pueda ser efectuada por movimiento diferencial entre los miembros que se aplican al terreno y los miembros de accionamiento tales 15 como orugas en lados opuestos del cargador mecánico. Mover una empuñadura de control en sentido hacia delante desde una posición central provoca el movimiento hacia delante y mover el control hacia atrás desde la posición central provoca el movimiento hacia atrás. La velocidad de movimiento para motores que son controlados es proporcional al desplazamiento de la empuñadura de control desde la posición central.
La patente norteamericana nº 6.460.640 muestra este tipo de sistema de control, en un pequeño 20 cargador mecánico. La patente norteamericana nº 5.913.802 se refiere a una segadora motorizada que orienta sus ruedas motrices con una sola palanca.
SUMARIO DEL INVENTO
El presente invento está definido por las reivindicaciones adjuntas y se refiere a un sistema de control para un vehículo, en un aspecto mostrado, un cargador mecánico accionado por orugas, con 25 componentes de control que pivotan alrededor de ejes erectos y transversales. El sistema de control es usado para controlar la velocidad y dirección de un vehículo, como se ha mostrado con accionamientos en lados opuestos del vehículo, y para controlar la orientación del vehículo.
Una placa o plataforma de soporte que forma un componente del sistema de control está montada para pivotar alrededor de un eje generalmente erecto y una empuñadura de control está montada sobre la 30 placa de soporte para su movimiento alrededor de un eje transversal al eje erecto de modo que la empuñadura de control puede ser movida en sentido hacia delante o hacia atrás para controlar el sentido de movimiento del vehículo. La plataforma o placa de soporte que está montada pivotablemente alrededor de un eje erecto puede ser hecha oscilar de lado a lado alrededor de un eje erecto para controlar la dirección del vehículo. Como se ha mostrado en un aspecto, puede usarse operar el accionamiento para los lados 35 opuestos del vehículo a velocidades diferenciales para su orientación. El movimiento alrededor del eje erecto proporciona movimiento para entradas de orientación. La magnitud de desplazamiento de la empuñadura de control alrededor del eje horizontal controla el sentido y velocidad de movimiento para el cargador mecánico. El eje erecto está hacia delante del eje de la empuñadura de control. Hay previstos enlaces adecuados para transferir el movimiento de la placa de soporte y de la empuñadura de control a los mecanismos de dirección 40 y accionamiento.
La única empuñadura de control está asociada con barras de referencia en la parte frontal y posterior de la empuñadura de control para permitir que el operario detecte la cantidad de movimiento o desplazamiento de la empuñadura de control desde una posición de referencia. Las barras de referencia también permiten que el operario tenga un mejor control. La mano del operario sobre la barra de referencia 45 estabiliza la mano con relación a la empuñadura de control cuando el vehículo se mueve. La mano está así provista de una posición de referencia incluso si el vehículo se mueve a una velocidad o sentido diferentes que el operario durante un corto período de tiempo.
El eje erecto de movimiento de la placa de soporte es en un aspecto, un eje central de un árbol fijo con relación al vehículo, de modo que la placa de soporte no se mueve sustancialmente hacia delante y hacia 50 atrás. Las barras de referencia están así ancladas al bastidor en sentido hacia delante y hacia atrás a través de la placa de soporte y proporcionan una referencia estacionaria, estable para que el operario se sustente sobre ella. El operario en un desplazamiento sobre plataforma puede así tener un enlace manual con el vehículo.
La empuñadura de control es usada para hacer oscilar la placa de soporte alrededor del eje erecto para orientarla así como para hacerla pivotar alrededor del eje transversal para control de dirección y velocidad.
Adicionalmente, en una realización preferida del invento, la velocidad máxima del cargador mecánico en al menos un sentido puede estar limitada y ser diferente de la velocidad máxima en las otras direcciones. 5 La velocidad de retroceso está limitada en la forma descrita, pero la velocidad de avance puede también estar limitada del mismo modo.
El vehículo, denominado cargador mecánico, está provisto con un panel que se moverá cuando se aplique a un objeto durante el movimiento longitudinal del cargador mecánico, para mover a su vez los controles hacia una posición de punto muerto o de parada. Esto minimizará la oportunidad de que el cargador 10 mecánico se mueva más allá de una posición deseada hacia un objeto fijo o un operario. La deceleración es para detener el movimiento hacia atrás.
Hay previsto un mecanismo de centrado para devolver los controles del motor de accionamiento a punto muerto cuando un operario suelta la empuñadura de control. El mecanismo de centrado está sobre una palanca de control de accionamiento justo en la unidad de accionamiento que incluye el motor de 15 accionamiento. Preferiblemente los accionamientos del vehículo como se ha mostrado son unidades de bomba de accionamiento del tipo de plato oscilante y de motor que son usados normalmente en accionamientos de cargador mecánico cuando la velocidad es controlada ajustando la salida de la bomba, que a su vez, ajusta la velocidad del motor asociada.
Las entradas de dirección y los controles de accionamiento hacia delante y hacia atrás pueden ser 20 usados para mover controles para motores de accionamiento eléctrico y operar carretes de válvula que pueden operar sistemas de accionamiento controlados de orientación motriz o de válvula de carrete. También pueden ser controlados sistemas mecánicos de velocidad variable o de accionamiento por correa.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
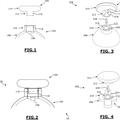
La fig. 1 es una vista en perspectiva posterior fragmentaria de un cargador mecánico típico que 25 utiliza los controles del presente invento;
La fig. 2 es una vista en planta superior de un cargador mecánico típico que usa los controles del presente invento;
La fig. 3 es una vista en perspectiva posterior agrandada del control que se monta sobre el cargador mecánico de la fig. 1; 30
La fig. 4 es una vista en alzado lateral, vista en la dirección indicada por la línea 4-4 en la fig. 3, de partes del sistema de control en una parte posterior de un cargador mecánico, con partes rotas y retiradas;
La fig. 4A es una vista en sección fragmentaria que muestra ranuras de tope que limitan la velocidad de orientación en un panel fijo y tomada por la línea 4A-4A en la fig. 4;
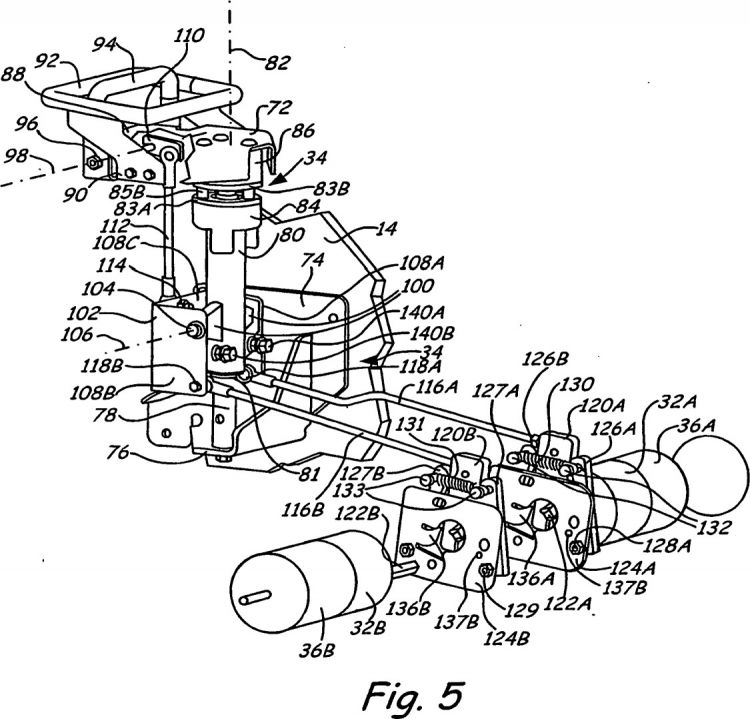
La fig. 5 es una vista en perspectiva fragmentaria de la disposición de control, vista en dirección 35 opuesta desde la fig. 4 con el cargador mecánico mostrado sólo de modo fragmentario y con partes omitidas para mayor claridad;
La fig. 6 es una vista similar a la fig. 5, que muestra un panel que evita el movimiento hacia atrás que mueve los controles hacia una posición de punto muerto cuando encuentra un obstáculo;
La fig. 7 es una vista en perspectiva posterior del sistema de control como se ha mostrado...
Reivindicaciones:
1ª. Un vehículo de trabajo autopropulsado (10) que comprende: un bastidor (12) que tiene un eje longitudinal que se extiende hacia delante y hacia atrás entre una parte frontal y una parte posterior del bastidor (12); una fuente de potencia o motriz (30) sobre el bastidor (12); un sistema de tracción (36A, 36B, 38, 40A, 40B) llevado sobre el bastidor para propulsar el bastidor (12) en sentido hacia delante y hacia atrás, 5 en el que el sistema de tracción (36A, 36B, 38, 40A, 40B) comprende motores de accionamiento separados (36A, 36B) y un sistema de dirección (34, 78, 80, 100, 102) para orientar el bastidor (12); teniendo los motores de accionamiento (36A, 36B) palancas (120A, 120B) para controlar los motores (36A, 36B) y móviles desde una posición central de no accionamiento selectivamente en sentido hacia delante y hacia atrás; un sistema de control (34, 72, 94) para controlar y orientar el movimiento hacia delante y hacia atrás del vehículo (10), 10 comprendiendo el sistema de control (34, 72, 94) una placa de soporte (72) montada pivotablemente alrededor de un primer eje erecto (82), una empuñadura de control (94) montada pivotablemente sobre la placa de soporte (72) alrededor de un segundo eje transversal (98), un enlace o articulación (102, 112, 116A, 116B) entre la placa de soporte (72) y los motores separados (36A, 36B, 38, 120A, 120B) y entre la empuñadura de control (94) y el sistema de tracción (36A, 36B, 38, 40A, 40B), controlando el enlace (102, 15 116A, 116B) los motores de accionamiento (36A, 36B) para accionar selectivamente los soportes sobre el suelo (40A, 40B) sobre lados opuestos del bastidor (12), incluyendo el enlace (102, 116A, 116B) una ménsula (102) móvil con la placa de soporte (72) alrededor del eje erecto (82) y hecha pivotar alrededor de un tercer eje transversal (106) diferente del segundo eje (98) y paralelo al mismo; una primera varilla (112) conectada entre la empuñadura de control (94) y la ménsula (102), y varillas móviles (116A, 116B) diferencialmente 20 conectadas a la ménsula (102) y a las palancas (120A, 120B) respectivamente, proporcionando las varillas móviles diferencialmente (116A, 116B) entradas de orientación a las palancas (116A, 116B) cuando la placa de soporte (72) es hecha pivotar alrededor del eje erecto (82) y provocando selectivamente el movimiento hacia delante y hacia atrás del vehículo (10) cuando el pivotamiento de la empuñadura de control (94) alrededor del segundo eje (98) hace pivotar el soporte (102) alrededor del tercer eje (106). 25
2ª. El vehículo de la reivindicación 1ª, en el que las varillas móviles diferencialmente están desplazadas del tercer eje en sentido hacia arriba y accionan las palancas en sentido hacia delante y hacia atrás, por lo que el movimiento de la empuñadura de control alrededor del segundo eje controla el sentido hacia delante y hacia atrás de movimiento del bastidor (12), y girando la placa de soporte alrededor del primer eje erecto se causa el movimiento del bastidor fuera de un trayecto en línea recta. 30
3ª. El vehículo de la reivindicación 2ª, en el que la empuñadura de control (94) forma un mango, y al menos dos secciones de barras transversales fijadas a la placa de soporte y posicionadas delante o detrás de la empuñadura de control (94), respectivamente.
4ª. El vehículo de cualquiera de las reivindicaciones 2ª o 3ª, en el que el sistema de tracción incluye un mecanismo cargado elásticamente (130, 131, 126A, 126B) para centrar cada una de las palancas de los 35 motores (36A, 36B) cuando la empuñadura de control (94) es liberada de la fuerza externa.
5ª. El vehículo de cualquiera de las reivindicaciones 2ª a 4ª, y una placa móvil (146) en un extremo del vehículo (10) acoplada para mover la varilla (102, 112, 116A, 116B) a una posición de punto muerto cuando el vehículo (10) se está moviendo en dirección con el extremo delantero y una parte de la placa móvil (146) se mueve en sentido opuesto con relación al bastidor (42). 40
6ª. El vehículo de cualquiera de las reivindicaciones 1ª a 5ª, en el que la placa de soporte está montada fija sobre un manguito (80), un árbol fijo (78) soportado con relación al bastidor (12), estando montado dicho manguito (80) sobre el árbol fijo (78) para rotación sobre el árbol fijo alrededor del primer eje erecto (82).
Patentes similares o relacionadas:
 MÁQUINA DE TRABAJO, del 21 de Febrero de 2011, de J.C. BAMFORD EXCAVATORS LIMITED: Una máquina de trabajo que incluye una estructura de contacto con el suelo motorizada, orientable y un aparato de control que […]
MÁQUINA DE TRABAJO, del 21 de Febrero de 2011, de J.C. BAMFORD EXCAVATORS LIMITED: Una máquina de trabajo que incluye una estructura de contacto con el suelo motorizada, orientable y un aparato de control que […]
 EMPUÑADURA CON MICROPROCESADOR PARA CONTROLAR UNA MAQUINA DE POTENCIA, del 20 de Agosto de 2010, de CLARK EQUIPMENT COMPANY: Un sistema de control para una máquina de potencia que tiene actuadores, comprendiendo el sistema de control:
un controlador principal que proporciona salidas […]
EMPUÑADURA CON MICROPROCESADOR PARA CONTROLAR UNA MAQUINA DE POTENCIA, del 20 de Agosto de 2010, de CLARK EQUIPMENT COMPANY: Un sistema de control para una máquina de potencia que tiene actuadores, comprendiendo el sistema de control:
un controlador principal que proporciona salidas […]
 PARAMETROS DE CONTROL SELECCIONABLES EN UNA MAQUINA DE POTENCIA, del 12 de Abril de 2010, de CLARK EQUIPMENT COMPANY: Un sistema de control para una máquina de potencia que tiene ruedas que se pueden dirigir y rotar de forma independiente, cuyo sistema de control comprende:
un dispositivo […]
PARAMETROS DE CONTROL SELECCIONABLES EN UNA MAQUINA DE POTENCIA, del 12 de Abril de 2010, de CLARK EQUIPMENT COMPANY: Un sistema de control para una máquina de potencia que tiene ruedas que se pueden dirigir y rotar de forma independiente, cuyo sistema de control comprende:
un dispositivo […]
 Botón de comando para mando de juegos y mando de juegos provisto de tal botón, del 29 de Julio de 2020, de Playrapid: Botón de comando para mando de juegos, materializado en forma de una palanca de mando y determinado exactamente por dos elementos:
- […]
Botón de comando para mando de juegos y mando de juegos provisto de tal botón, del 29 de Julio de 2020, de Playrapid: Botón de comando para mando de juegos, materializado en forma de una palanca de mando y determinado exactamente por dos elementos:
- […]
PALANCA DE MANDO PARA DISPOSITIVOS DE CONTROL DE ACCIONAMIENTO MANUAL, del 14 de Febrero de 2020, de ALIAGA MORENO, Victor: 1. Palanca de mando para dispositivos de control de accionamiento manual que, aplicable para formar parte de un dispositivo de control de accionamiento manual, acoplada a […]
Elemento de mando accionable por presión y por giro para un automóvil, del 14 de Agosto de 2019, de LEOPOLD KOSTAL GMBH & CO. KG: Elemento de mando accionable por presión y por giro para un automóvil, especialmente un elemento de mando de volante, con un elemento de entrada […]
Cardán compacto de dos ejes para palanca de control, del 24 de Abril de 2019, de Woodward MPC, Inc: Una palanca de control compacta de dos ejes que comprende: un dispositivo de entrada piloto que puede pivotar alrededor de un eje de cabeceo […]
Unidad de equilibrado, del 25 de Abril de 2018, de BAE SYSTEMS PLC: Una unidad de equilibrado mediante amortiguación de las vibraciones para un aparato de dispositivo de control, contrarrestando dicha unidad […]