PARAMETROS DE CONTROL SELECCIONABLES EN UNA MAQUINA DE POTENCIA.
Un sistema de control para una máquina de potencia que tiene ruedas que se pueden dirigir y rotar de forma independiente,
cuyo sistema de control comprende:
un dispositivo de entrada de usuario que incluye una pluralidad de entradas activables por usuario que proveen señales de actuación de usuario; y
un controlador electrónico acoplado al dispositivo de entrada de usuario y configurado para recibir una pluralidad de parámetros operativos seleccionables por usuario, basándose en la actuación del usuario de las entradas activables por usuario, y proveer una señal de control de dirección para controlar la dirección de las ruedas y una señal de control de velocidad para controlar la velocidad de las ruedas basándose en los parámetros operativos recibidos;
una entrada de modo momentáneo de dirección activable por usuario, que provee una señal de modo momentáneo de dirección indicativa de un modo momentáneo deseado de dirección; y
en el que el controlador está configurado para controlar la máquina de potencia en el modo de dirección momentáneo hasta que se desactiva la señal de modo de dirección momentáneo,
en el que el modo de dirección momentáneo comprende un modo de dirección de deslizamiento y en donde el controlador está configurado para proveer la señal de control de dirección para mover todas las ruedas a una dirección directamente hacia el frente antes de controlar la máquina de potencia en el modo de dirección de deslizamiento
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US01/46532.
Solicitante: CLARK EQUIPMENT COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 200 CHESTNUT RIDGE ROAD,WOODCLIFF LAKE, NJ 07675-8738.
Inventor/es: ROSSOW, SCOTT, R., BRANDT, KENNETH, A..
Fecha de Publicación: .
Fecha Concesión Europea: 25 de Noviembre de 2009.
Clasificación Internacional de Patentes:
- B62D7/15B
- E02F9/20A
- E02F9/22S
- E02F9/22T
- G05G9/047 FISICA. › G05 CONTROL; REGULACION. › G05G DISPOSITIVOS O SISTEMAS DE CONTROL EN LA MEDIDA EN QUE SUS CARACTERISTICAS SON UNICAMENTE MECANICAS ("mecanismos "Bowden" o similares F16C 1/10; engranajes o mecanismos no especializados con este fin F16H; mecanismos de cambio de velocidad o de inversión para transmisiones que transmiten movimientos rotativos F16H 59/00 - F16H 63/00). › G05G 9/00 Mecanismos de control maniobrados a mano equipados de un solo órgano de control que trabajan con varios órganos controlados, p. ej. selectivamente, simultáneamente. › pudiendo ser accionado a mano el órgano de control alrededor de ejes ortogonales, p. ej. palancas de mando ("joysticks").
Clasificación PCT:
- G05G25/02 G05G […] › G05G 25/00 Otras partes constitutivas,características o accesorios demecanismos de control, p. ej. suspensiones elásticas de órganos intermedios. › evitando la formación o la transmisión de ruido.
Clasificación antigua:
- G05G25/02 G05G 25/00 […] › evitando la formación o la transmisión de ruido.
Fragmento de la descripción:
Parámetros de control seleccionables en una máquina de potencia.
Antecedentes del invento
El presente invento se refiere en general a dispositivos de entrada de usuario para máquinas de potencia. En particular, el presente invento se refiere a un sistema de control en una máquina de potencia con una pluralidad de parámetros seleccionables.
Las máquinas de potencia, tales como las cargadoras, típicamente tienen una serie de dispositivos de accionamiento a potencia. Tales dispositivos de accionamiento pueden incluir, por ejemplo, dispositivos de accionamiento de impulsión que proporcionan potencia de tracción a las ruedas o a las bandas de rodamiento de la máquina. Los dispositivos de accionamiento pueden incluir también los que estén en relación de asociación con la manipulación de una herramienta de trabajo primaria, tal como un cangilón. En ese caso, los dispositivos de accionamiento incluyen dispositivos de accionamiento de elevación e inclinación. Por supuesto, se pueden usar también una amplia gama de otros dispositivos de accionamiento en dichas máquinas de potencia. Ejemplos de tales dispositivos de accionamiento incluyen dispositivos de accionamiento auxiliares, dispositivos de accionamiento de herramienta manejados a mano o a distancia u otros dispositivos de accionamiento en relación de asociación con el funcionamiento de la propia máquina de potencia, o bien una herramienta acoplada a la máquina de potencia.
Los diversos dispositivos de accionamiento de dichas máquinas de potencia se han controlado convencionalmente por articulaciones mecánicas. Por ejemplo, cuando los dispositivos de accionamiento son dispositivos de accionamiento hidráulicos controlados por un fluido hidráulico a presión, se han controlado por dispositivos de entrada de usuario tales como empuñaduras, palancas, o pedales. Los dispositivos de entrada de usuario se han conectado a un carrete de válvula (de una válvula que controle el flujo de fluido hidráulico a presión que va al dispositivo de accionamiento hidráulico) mediante una articulación mecánica. La articulación mecánica transforma el movimiento de entrada del usuario en un desplazamiento lineal del carrete de la válvula para de ese modo controlar el flujo de fluido hidráulico que entra al dispositivo de accionamiento.
Se han desarrollado también dispositivos de entrada de control electrónicos. Los dispositivos de entrada electrónicos incluyen un detector electrónico que detecta la posición de los dispositivos de entrada que se pueden activar por el usuario (tales como empuñaduras de mano y pedales). En el pasado, tales detectores han sido detectores del tipo resistivo, tales como potenciómetros rotatorios o lineales.
En épocas anteriores, las máquinas de potencia que tenían controles electrónicos han controlado tanto la velocidad como la dirección basándose en un algoritmo de preconfiguración y control predeterminado. El cambio de los parámetros operativos era incómodo, requiriendo a menudo una reprogramación compleja del controlador.
El documento WO-A-00/37744 se refiere a un sistema de control y reconocimiento de herramienta para uso en una máquina de trabajo y a un sistema y un método para configurar electrónicamente los sistemas de control y los sistemas hidráulicos en relación de asociación con una máquina de trabajo particular para controlar la operación de una herramienta de trabajo particular montada para usar en la máquina de trabajo basándose en los parámetros operativos en relación de asociación con la herramienta de trabajo.
El documento EP-A-305326 se refiere a un sistema de control de dirección para elegir entre diferentes modos de dirección.
Sumario del invento
Un sistema de control de acuerdo con una característica del presente invento incluye una o más entradas de usuario, que puede mover un usuario en un compartimiento de operador de una máquina de potencia. Las entradas de usuario se pueden usar para configurar valores para una pluralidad de parámetros operativos configurables con el fin de controlar la dirección de movimiento de la máquina de potencia, así como la velocidad de desplazamiento.
Breve descripción de los dibujos
La Figura 1 es una vista en alzado lateral de una máquina de potencia de acuerdo con una realización del presente invento.
La Figura 2 es un diagrama de bloques de un circuito de control de acuerdo con una realización del presente invento.
Las Figuras 3A-3E ilustran diferentes modos de dirección.
La Figura 4 es un diagrama de flujo que ilustra un modo momentáneo de dirección de deslizamiento.
La Figura 5 es un gráfico de velocidad en función del desplazamiento de la palanca de mando.
La Figura 6 es un diagrama de flujo de la configuración de velocidad máxima.
La Figura 7 es un gráfico de velocidad en función del tiempo dada una entrada escalonada a la palanca de mando.
La Figura 8 es un gráfico de ángulos de giro en función del tiempo dada una entrada escalonada a la palanca de mando.
Las Figuras 9 a 11 son diagramas de flujo que ilustran la configuración de la aceleración de respuesta de dirección, la configuración de la banda muerta, y la configuración de una velocidad máxima de dirección.
Las Figuras 12 y 13 ilustran la implementación de una función de regulación.
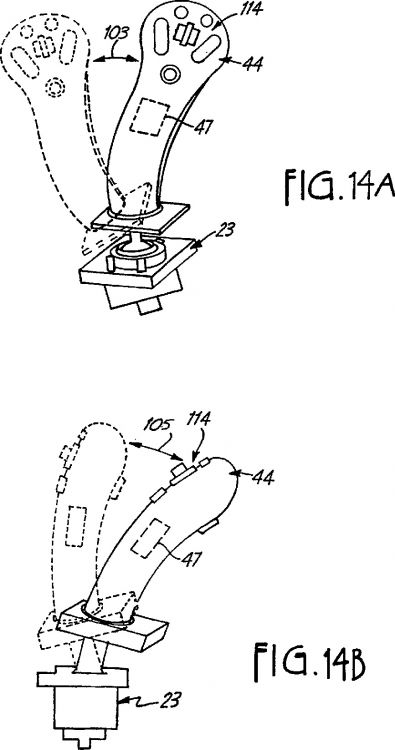
Las Figuras 14A y 14B son vistas de una realización de una palanca de mando usada como un mecanismo de entrada de usuario.
Descripción detallada de las realizaciones ilustrativas
La Figura 1 es una vista en alzado lateral de una realización de una cargadora 10 de acuerdo con el presente invento. La cargadora 10 incluye un chasis 12 soportado por las ruedas 14. El chasis 12 soporta también una cabina 16 que define un compartimiento de operador y que sustancialmente incluye un asiento 19 en el que se sienta un operador para controlar la cargadora 10 de dirección de deslizamiento. Una barra 21 de asiento está acoplada de forma pivotable a una parte frontal de la cabina 16. Cuando el operador ocupa el asiento 19, hace pivotar entonces la barra 21 de asiento desde la posición elevada (mostrada en líneas de trazos en la Figura 1) hasta la posición baja mostrada en la Figura 1.
Un par de palancas de mando 23 de dirección (de las que solamente se ha mostrado una en la Figura 1) están montadas dentro de la cabina 16. Las palancas de mando 23 son manipuladas por el operador para controlar el movimiento hacia delante y hacia atrás de la cargadora 10, y con el fin de gobernar la cargadora 10. Una realización de la palanca de mando 23 se ha ilustrado con mayor detalle con respecto a las Figuras 14A-14B.
Un brazo de elevación 17 está acoplado al chasis 12 en puntos de pivotamiento 20 (de los que solamente uno se ha mostrado en la Figura 1, estando el otro idénticamente dispuesto en el lado contrario de la cargadora 10). Un par de cilindros hidráulicos 22 (de los que solamente se ha mostrado uno en la Figura 1) están acoplados de forma pivotable al chasis 12 en puntos de pivotamiento 24 y al brazo de elevación 17 en puntos de pivotamiento 26. El brazo de elevación 17 está acoplado a una herramienta de trabajo que, en esta realización, es un cangilón 28. En una realización simplificada, el brazo de elevación 17 está acoplado de forma pivotable al cangilón 28 en puntos de pivotamiento 30, y otro cilindro hidráulico 32 está acoplado de forma pivotable al brazo de elevación 17 en un punto de pivotamiento 34 y al cangilón 28 en un punto de pivotamiento 36. Sin embargo, se puede usar cualquier tipo adecuado de conexión. Asimismo, aunque solamente se ha mostrado un cilindro 32, se entenderá que se pueden usar cualquier número que se desee de cilindros para hacer trabajar al cangilón 28 o a cualquier otra herramienta adecuada.
El operador que está situado en la cabina 16 manipula el brazo de elevación 17 y el cangilón 68 accionando selectivamente los cilindros hidráulicos 22 y 32. En las cargadoras de la técnica anterior, dicho accionamiento se llevaba a cabo mediante la manipulación de pedales en la cabina 16 o mediante el accionamiento de empuñaduras en la cabina 16, de los que ambos estaban fijados por articulaciones mecánicas a válvulas (o a carretes de válvulas) que controlaban la operación de los cilindros 22 y 23. Sin embargo, de acuerdo con el presente invento, este accionamiento se lleva a cabo mediante el movimiento de un elemento que se puede mover, tal como una palanca de mando, un pedal o un interruptor o pulsador accionable...
Reivindicaciones:
1. Un sistema de control para una máquina de potencia que tiene ruedas que se pueden dirigir y rotar de forma independiente, cuyo sistema de control comprende:
un dispositivo de entrada de usuario que incluye una pluralidad de entradas activables por usuario que proveen señales de actuación de usuario; y
un controlador electrónico acoplado al dispositivo de entrada de usuario y configurado para recibir una pluralidad de parámetros operativos seleccionables por usuario, basándose en la actuación del usuario de las entradas activables por usuario, y proveer una señal de control de dirección para controlar la dirección de las ruedas y una señal de control de velocidad para controlar la velocidad de las ruedas basándose en los parámetros operativos recibidos;
una entrada de modo momentáneo de dirección activable por usuario, que provee una señal de modo momentáneo de dirección indicativa de un modo momentáneo deseado de dirección; y
en el que el controlador está configurado para controlar la máquina de potencia en el modo de dirección momentáneo hasta que se desactiva la señal de modo de dirección momentáneo,
en el que el modo de dirección momentáneo comprende un modo de dirección de deslizamiento y en donde el controlador está configurado para proveer la señal de control de dirección para mover todas las ruedas a una dirección directamente hacia el frente antes de controlar la máquina de potencia en el modo de dirección de deslizamiento.
2. El sistema de control de la reivindicación 1, en el que la máquina de potencia se puede dirigir en una pluralidad de modos de dirección y en el que las entradas activables por usuario incluyen:
una entrada de selección de modo de impulsión que provee una señal de selección indicativa de un modo seleccionado de entre uno de la pluralidad de modos de dirección, estando configurado el controlador para proveer la señal de control de dirección basándose en la señal de selección recibida.
3. El sistema de control de la reivindicación 1, en el que el dispositivo de entrada de usuario comprende:
al menos una palanca de mando que se puede mover con respecto a una posición neutral.
4. El sistema de control de la reivindicación 3, en el que las entradas activables por usuario incluyen:
una entrada de banda muerta que provee una señal de banda muerta indicativa de un intervalo previsto de movimiento de la palanca de mando con respecto a la posición neutral a través del cual la palanca de mando se tiene que mover antes de solicitar una entrada de respuesta de controlador.
5. El sistema de control de la reivindicación 1, en el que el controlador provee las señales de control para acelerar las ruedas de acuerdo con un parámetro de control de aceleración y en el que las entradas activables por usuario comprenden:
una entrada de aceleración de impulsión que provee una señal de aceleración indicativa de una respuesta prevista de control de aceleración; y
en donde el controlador está configurado para modificar el parámetro de control de aceleración basándose en la señal de aceleración.
6. El sistema de control de la reivindicación 5, en el que el parámetro de control de aceleración comprende una curva de control de aceleración.
7. El sistema de control de la reivindicación 1, en el que el controlador controla una velocidad en la que las ruedas se dirigen basándose en un parámetro de control de dirección y en el que las entradas activables por usuario comprenden:
una entrada de control de dirección que provee una señal de control de dirección indicativa de una respuesta prevista de control de dirección; y
en el que el controlador está configurado para modificar el parámetro de control de dirección basándose en la señal de control de dirección.
8. El sistema de control de la reivindicación 7, y que comprende además:
un detector de ángulo de dirección acoplado al controlador y que provee una señal de ángulo de dirección indicativa de un ángulo en el que está dispuesta una rueda en relación de asociación con respecto a un ángulo de rueda predeterminado.
9. El sistema de control de la reivindicación 8, en el que el controlador controla la velocidad de las ruedas basándose, al menos en parte, en un valor de velocidad máxima indicativo de una velocidad de impulsión máxima, y en donde las entradas activables por usuario comprenden:
una entrada de velocidad máxima de dirección que provee una señal de velocidad máxima de dirección indicativa de una velocidad máxima cuando la señal de ángulo de dirección indica que las ruedas exceden un valor umbral predeterminado de ángulo de dirección.
10. El sistema de control de la reivindicación 9, en el que el controlador se ha configurado para ajustar la máxima velocidad de impulsión a la máxima velocidad indicada por la señal de velocidad máxima de dirección cuando la señal de ángulo de dirección indica que las ruedas exceden el umbral predeterminado de ángulo de dirección.
11. El sistema de control de la reivindicación 1, y que comprende además:
un detector de velocidad de rueda acoplado al controlador y que provee una señal de velocidad indicativa de la velocidad de las ruedas.
12. El sistema de control de la reivindicación 1, en el que el controlador está configurado además para proveer la señal de control de dirección con el fin de controlar la máquina de potencia en un modo de dirección previamente seleccionado cuando se desactiva la señal de modo momentáneo de dirección.
13. El sistema de control de la reivindicación 1 y que comprende además:
una entrada de regulación activable por usuario, acoplada al controlador, que provee una señal de entrada de regulación, cuyo controlador está configurado para recibir la señal de entrada de regulación y proveer la señal de control de dirección para regular al menos una de las ruedas dirigiéndola a un ángulo positivo o negativo con respecto a una dirección directamente hacia el frente.
14. El sistema de control de la reivindicación 2, en el que la entrada de regulación incluye:
un interruptor de conexión/desconexión de regulación que provee una señal de habilitación para habilitar y deshabilitar la regulación; y
un interruptor de selección de regulación que provee un valor de regulación indicativo de un grado de ángulo de dirección mediante el cual se regulan las ruedas.
15. El sistema de control de la reivindicación 13, en el que el controlador está configurado para regular un conjunto predeterminado de la pluralidad de ruedas basándose en un modo de dirección seleccionado actualmente y en la señal de entrada de regulación.
Patentes similares o relacionadas:
 Botón de comando para mando de juegos y mando de juegos provisto de tal botón, del 29 de Julio de 2020, de Playrapid: Botón de comando para mando de juegos, materializado en forma de una palanca de mando y determinado exactamente por dos elementos:
- […]
Botón de comando para mando de juegos y mando de juegos provisto de tal botón, del 29 de Julio de 2020, de Playrapid: Botón de comando para mando de juegos, materializado en forma de una palanca de mando y determinado exactamente por dos elementos:
- […]
PALANCA DE MANDO PARA DISPOSITIVOS DE CONTROL DE ACCIONAMIENTO MANUAL, del 14 de Febrero de 2020, de ALIAGA MORENO, Victor: 1. Palanca de mando para dispositivos de control de accionamiento manual que, aplicable para formar parte de un dispositivo de control de accionamiento manual, acoplada a […]
Elemento de mando accionable por presión y por giro para un automóvil, del 14 de Agosto de 2019, de LEOPOLD KOSTAL GMBH & CO. KG: Elemento de mando accionable por presión y por giro para un automóvil, especialmente un elemento de mando de volante, con un elemento de entrada […]
Cardán compacto de dos ejes para palanca de control, del 24 de Abril de 2019, de Woodward MPC, Inc: Una palanca de control compacta de dos ejes que comprende: un dispositivo de entrada piloto que puede pivotar alrededor de un eje de cabeceo […]
Unidad de equilibrado, del 25 de Abril de 2018, de BAE SYSTEMS PLC: Una unidad de equilibrado mediante amortiguación de las vibraciones para un aparato de dispositivo de control, contrarrestando dicha unidad […]
Sistema de control y método para controlar el movimiento de un aparato aéreo, del 27 de Diciembre de 2017, de IVECO MAGIRUS AG: Sistema de control para controlar el movimiento de un aparato aéreo, en particular para controlar una escalera giratoria de un vehículo de lucha contra incendios, que […]
Mando de control articulado, del 13 de Septiembre de 2017, de CLARK EQUIPMENT COMPANY: Un vehículo de construcción que tiene un cuerpo y un puesto de operario , que incluye un asiento apoyado en un bastidor […]
Dispositivo de control para maquinaria industrial, del 16 de Agosto de 2017, de ANGEL IGLESIAS, S.A.: Dispositivo de control para maquinaria industrial que comprende: una mini-palanca de mando que comprende un eje de accionamiento (1a), y una […]