APARATO DOMOTICO COMPATIBLE CON LOS ESTANDARES CELENEC EN 50090 E ISO/IEC 14543 PARA EL CONTROL DE CAMARAS ROBOTICAS.
Aparato domótico compatible con los estándares CELENEC EN 50090 e ISO/IEC 14543 para el control de cámaras robóticas.
La presente invención hace referencia a un sistema electrónico cuya arquitectura y estructura interna permiten integrar el control de una cámara robótica con movimientos de elevación/azimut/panoramización en una red domótica de par trenzado compatible con los Estándares EN 50090 e ISO/IEC 14543.El aparato está formado por al menos un microcontrolador (4), un sistema de memoria (5), al menos un circuito electrónico (2) de interfaz al bus Konnex (1) o cable de par trenzado de la instalación domótica, al menos un circuito electrónico (6), compatible con el sistema de interfaz RS-232, que se conecta directamente al menos a una cámara robótica (11) y una fuente de alimentación (3).El principal problema con el que nos encontramos actualmente en una instalación domótica de tipo Konnex sobre par trenzado es que utiliza dos conductores para conectar todos los módulos domóticos entre sí. Cuando se quiere disponer de una o varias cámaras robóticas para realizar tareas de video-vigilancia o monitorización remota se requiere un segundo cableado, de tipo RS-232 independiente al cable de par trenzado de la instalación domótica Konnex, para dirigir el movimiento de estas cámaras desde un ordenador central.La presente invención soluciona estos problemas ya que se conecta por un lado al bus Konnex o cable de par trenzado de una instalación domótica Konnex, y por otro lado a una o varias cámaras robóticas compatibles con el interfaz RS-232
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200702631.
Solicitante: UNIVERSIDAD DE LAS PALMAS DE GRAN CANARIA.
Nacionalidad solicitante: España.
Provincia: LAS PALMAS.
Inventor/es: BENITEZ DIAZ,JUAN DOMINGO.
Fecha de Solicitud: 26 de Septiembre de 2007.
Fecha de Publicación: .
Fecha de Concesión: 31 de Enero de 2011.
Clasificación Internacional de Patentes:
- H04L12/28H
Clasificación PCT:
- H04L12/28 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04L TRANSMISION DE INFORMACION DIGITAL, p. ej. COMUNICACION TELEGRAFICA (disposiciones comunes a las comunicaciones telegráficas y telefónicas H04M). › H04L 12/00 Redes de datos de conmutación (interconexión o transferencia de información o de otras señales entre memorias, dispositivos de entrada/salida o unidades de tratamiento G06F 13/00). › caracterizados por la configuración de los enlaces, p. ej. redes locales (LAN), redes extendidas (WAN) (redes de comunicación inalámbricas H04W).
Fragmento de la descripción:
Aparato domótico compatible con los estándares CELENEC EN 50090 e ISO/IEC 14543 para el control de cámaras robóticas.
Sector de la técnica
La presente invención hace referencia a un sistema electrónico cuya arquitectura y estructura interna permiten integrar el control de una cámara robótica con movimientos de elevación/azimut/panoramización en una red domótica de par trenzado compatible con los Estándares EN 50090 e ISO/IEC 14543, también denominados "Konnex".
Estado de la técnica
Un inconveniente que presentan las instalaciones domóticas en edificios inteligentes consiste en la ausencia de imágenes para verificar el correcto funcionamiento de los componentes domóticos. Esto es debido a que los aparatos utilizados en las instalaciones domóticas han resultado de la acomodación de aparatos utilizados en la automatización de procesos industriales, en los cuales, la monitorización y control a través de imágenes no es lo más usual.
Cuando se quiere disponer de imágenes estáticas o de vídeo en un edificio inteligente que incluye una instalación domótica, se utiliza una instalación independiente en la que se conectan una o varias cámaras que pueden ser estáticas (con orientación fija) o robóticas (con movimiento en tres grados de libertad). Para todas ellas se requiere de un segundo cableado independiente por donde se transportan las imágenes a un equipo que visualiza y/o registra y/o transmite a otros sistemas dichas imágenes. Cuando se utilizan cámaras robóticas, se requiere de un tercer cableado adicional para dirigir el movimiento de las cámaras desde un ordenador central. Este cableado tiene a veces una limitación en el número máximo de cámaras conectadas entre sí a un mismo cable. Si se quiere ampliar el número de cámaras, se utilizan cableados independientes conectados a conectores independientes de un ordenador convencional. Por ello, un segundo inconveniente que aparece cuando se utilizan cámaras en instalaciones domóticas consiste en la necesidad de uno o varios cableados adicionales para realizar el control del movimiento de las cámaras robóticas.
Actualmente una instalación domótica de tipo Konnex sobre par trenzado utiliza dos conductores para conectar todos los módulos domóticos entre sí. Cuando se quiere disponer de una o varias cámaras robóticas (orientación libre) para realizar tareas de vídeo-vigilancia o monitorización remota se requiere un segundo cableado, de tipo RS-232 independiente al cable de par trenzado Konnex, para dirigir el movimiento de estas cámaras desde un ordenador central. Los inconvenientes que de aquí se deducen son los siguientes:
El aparato domótico objeto de la invención, se conecta por un lado al bus Konnex o cable de par trenzado de una instalación domótica Konnex, y por otro lado a una o varias cámaras robóticas compatibles con el interfaz RS-232. Las ventajas que presenta este sistema son las siguientes:
Esta invención se puede integrar en instalaciones domóticas de tipo Konnex tanto de nueva creación como ya existentes. La norma Konnex es actualmente un estándar mundial ISO/IEC 14543 y europeo CENELEC EN 50090 de sistemas electrónicos para la automatización de edificios.
Explicación de la invención
La presente invención hace referencia a un aparato domótico, compatible con los estándares CELENEC EN 50090 e ISO/IEC 14543, para el control de cámaras robóticas. El aparato está formado por al menos un microcontrolador que ejecuta los programas alojados en el sistema de memoria; un sistema de memoria que comprende al menos una memoria volátil y dos de tipo no volátil; al menos un circuito electrónico de interfaz al bus Konnex o cable de par trenzado de la instalación domótica, constituido por al menos un cable; al menos un circuito electrónico, compatible con el sistema de interfaz RS-232, que se conecta directamente al menos a una cámara robótica a través de al menos un cable; y una fuente de alimentación.
El aparato domótico se conecta por un lado al bus Konnex o cable de par trenzado de la instalación domótica que se encarga de transmitir el protocolo Konnex entre los distintos módulos domóticos conectados a él. De esta forma, la invención puede recibir, entender y enviar mensajes sujetos al protocolo Konnex. Y por otro lado a cualquier cámara robótica con movimiento pan/tilt/zoom a través de un cable y conector compatibles con RS-232.
Descripción de las figuras
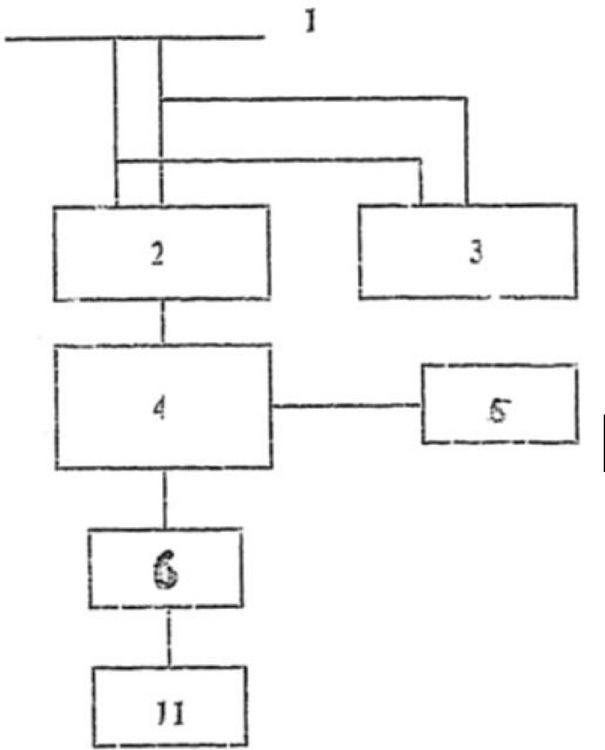
La figura 1 muestra un esquema representativo del aparato domótico de manera que se puedan identificar todos los elementos mencionados en el modo de realización preferente y sea descriptivo de los elementos reivindicados.
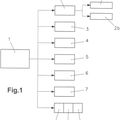
La figura 2 muestra un esquema representativo de una instalación domótica habitual en un edificio inteligente en la cuál se ha incluido el aparato domótico, objeto de la invención, para que quede clara la conexión del aparato domótico tanto a la instalación domótica como a las múltiples cámaras robóticas.
Modo de realización preferente de la invención
Con el fin de demostrar mejor las características de la invención, se describe a continuación, a título de ejemplo y sin carácter limitativo, un modo de realización preferido referido a las figuras existentes.
Como se muestra en la figura 1, el aparato domótico 9 está compuesto preferiblemente por cinco partes: un microcontrolador 4, un sistema de memoria 5, un circuito electrónico 2 de interfaz al bus Konnex o cable de par trenzado 1 de la instalación domótica, un circuito electrónico 6, compatible con el interfaz RS-232, que se conecta directamente a la cámara robótica 11 y una fuente de alimentación 3.
El microcontrolador 4 ejecuta los programas que se encuentran alojados en el sistema de memoria. La parte del sistema de memoria correspondiente a la memoria no volátil ROM preferiblemente está integrada dentro del mismo chip del microcontrolador 4.
El sistema de memoria 5 comprende preferiblemente una memoria volátil de tipo RAM y dos de tipo no volátil. Las dos memorias no volátiles están compuestas preferiblemente por una memoria ROM donde se encuentran las rutinas que procesan las señales del protocolo Konnex y una memoria preferiblemente del tipo EPROM o Flash, siendo estas donde se guarda el programa de aplicación en el momento de la configuración del aparato domótico 9, tarea que se realiza preferiblemente después del proceso de instalación del aparato domótico 9 en la instalación domótica correspondiente.
El circuito electrónico 2 de interfaz al bus Konnex o cable de par trenzado 1 de la instalación domótica está constituido preferiblemente por un cable 8 que incluye dos pares de conductores eléctricos trenzados y doblemente apantallados. Esta parte del aparato domótico 9 es la que se encarga de recibir y enviar al bus Konnex las señales en el formato establecido por el protocolo Konnex.
El circuito electrónico 6 se conecta directamente a la cámara robótica 11, a través de un cable 10 y múltiples conectores compatibles con el estándar RS-232, y se utiliza para realizar el envío y recepción de la información de control a la...
Reivindicaciones:
1. Aparato domótico, compatible con los estándares CELENEC EN 50090 e ISO/IEC 14543, para el control de cámaras robóticas que comprende los siguientes elementos: al menos un microcontrolador (4) que ejecuta los programas alojados en el sistema de memoria (5); un sistema de memoria (5) que comprende al menos una memoria volátil y dos de tipo no volátil; al menos un circuito electrónico (2) de interfaz al bus Konnex o cable de par trenzado (1) de la instalación domótica, constituido por al menos un cable (8) y múltiples conectores; al menos un circuito electrónico (6), compatible con el sistema de interfaz RS-232, que se conecta directamente al menos a una cámara robótica (11) a través de al menos un cable (10) y múltiples conectores; y una fuente de alimentación (3).
2. Aparato domótico según reivindicación 1 caracterizado porque se conecta por un lado al bus Konnex o cable de par trenzado (1) de la instalación domótica, que se encarga de transmitir y recibir mensajes compatibles con el protocolo Konnex entre los distintos módulos domóticos (7) conectados a él, y por otro lado al menos a una cámara robótica (11).
3. Aparato domótico según reivindicaciones 1 y 2 caracterizado porque al menos una cámara robótica (11) conectada a él puede a su vez conectarse a otro equipo donde se pueda visualizar y/o registrar y/o transmitir la secuencia de imágenes captadas por la cámara robótica (11).
4. Aparato domótico según reivindicación 1 caracterizado porque la alimentación de todo el sistema electrónico viene proporcionada por el cable de par trenzado (1) de la instalación domótica, siendo esta la única alimentación eléctrica que requiere el aparato domótico (9) para su correcto funcionamiento.
5. Aparato domótico según la reivindicación 1 caracterizado porque permite dirigir el comportamiento de múltiples cámaras robóticas (11) a partir de la actividad que se genera en una instalación domótica de tipo Konnex, como por ejemplo la activación o desactivación de sensores o las órdenes enviadas a la instalación domótica desde uno o varios ordenadores externos.
6. Utilización del aparato domótico según reivindicaciones anteriores en sistemas de seguridad contra intrusos y técnica, visualización de distintos objetos para los que haya que mover la óptica de una cámara, monitorización remota en la que se involucra imagen, reconocimiento de personas y objetos, y en seguimiento de personas y objetos que pueden moverse.
Patentes similares o relacionadas:
PROCEDIMIENTO DE COMUNICACIÓN POR RADIOFRECUENCIA EN UNA INSTALACIÓN DOMÓTICA, del 3 de Febrero de 2012, de SOMFY S.A.S: Procedimiento de comunicación por radiofrecuencia en una instalación domótica que comprende al menos un emisor de órdenes (T x 1, T x 2, T x 3) y al menos […]
PROCEDIMIENTO DE COMUNICACIÓN POR RELÉ ENTRE UN MANDO A DISTANCIA NÓMADA Y EQUIPOS DOMÓTICOS, del 23 de Diciembre de 2011, de SOMFY SAS: Procedimiento de funcionamiento de una instalación domótica que comprende un control de modo nómada , un relé y equipos domóticos que equipan […]
RED LOCAL QUE UTILIZA UNA RED DE DISTRIBUCIÓN DE ENERGÍA ELÉCTRICA Y DISPOSITIVO DE REFLEXIÓN ASOCIADO, del 18 de Julio de 2011, de FRANCE TELECOM: Una red local para la transferencia de informaciones entre varios dispositivos de comunicación conectados a una red de distribución de energía […]
 CONVERTIDOR DE SEÑALES ELECTRONICAS DOMOTICAS A OBJETOS DE IDENTIFICACION REAL PARA SU TRATAMIENTO, del 14 de Febrero de 2011, de TRAMERING 2006, S.L: Convertidor de señales electrónicas domóticas a objetos de identificación real para su tratamiento, consistente en un interfaz comprendiendo: un computador […]
CONVERTIDOR DE SEÑALES ELECTRONICAS DOMOTICAS A OBJETOS DE IDENTIFICACION REAL PARA SU TRATAMIENTO, del 14 de Febrero de 2011, de TRAMERING 2006, S.L: Convertidor de señales electrónicas domóticas a objetos de identificación real para su tratamiento, consistente en un interfaz comprendiendo: un computador […]
 SISTEMA INTEGRADO PARA CONTROLAR LUCES Y TOLDOS, del 25 de Mayo de 2010, de LUTRON ELECTRICS CO., INC.: Método para controlar luces y toldos que comprende las etapas de proporcionar un sistema de control de iluminación que incluye un procesador central programable […]
SISTEMA INTEGRADO PARA CONTROLAR LUCES Y TOLDOS, del 25 de Mayo de 2010, de LUTRON ELECTRICS CO., INC.: Método para controlar luces y toldos que comprende las etapas de proporcionar un sistema de control de iluminación que incluye un procesador central programable […]
 ARQUITECTURA DE UNA PASARELA DOMESTICA CONFIGURABLE, del 23 de Marzo de 2010, de SAGEM COMMUNICATION S.A.: Procedimiento de configuración de conexiones internas de una pasarela doméstica destinadas a llevar servicios accesibles desde al menos una interfaz […]
ARQUITECTURA DE UNA PASARELA DOMESTICA CONFIGURABLE, del 23 de Marzo de 2010, de SAGEM COMMUNICATION S.A.: Procedimiento de configuración de conexiones internas de una pasarela doméstica destinadas a llevar servicios accesibles desde al menos una interfaz […]
 PROCEDIMIENTO DE ENSAYO Y DE INSTALACION DE UN MANDO A DISTANCIA DOMOTICO, del 10 de Febrero de 2010, de SOMFY SAS: Procedimiento de ensayo y de instalación de un mando a distancia (RCU) para dar instrucciones a elementos (ACT1, ACT2, ACT3) de una red domótica, destinada […]
PROCEDIMIENTO DE ENSAYO Y DE INSTALACION DE UN MANDO A DISTANCIA DOMOTICO, del 10 de Febrero de 2010, de SOMFY SAS: Procedimiento de ensayo y de instalación de un mando a distancia (RCU) para dar instrucciones a elementos (ACT1, ACT2, ACT3) de una red domótica, destinada […]
Sincronización de una aplicación en un dispositivo auxiliar, del 22 de Julio de 2020, de OPENTV, INC.: Un método que comprende, mediante un dispositivo de medios: acceder, utilizando un módulo de recepción, un flujo de datos que incluye contenido […]