PROCEDIMIENTO DE ACCIONAMIENTO DE UN VEHÍCULO DE CUATRO RUEDAS DIRECTRICES CON LA AYUDA DE UN DISPOSITIVO DE FRENADO INDIVIDUAL DE LAS RUEDAS.
Procedimiento de accionamiento de un vehículo, que comprende las etapas - cuando se detecta que la desviación sobrepasa un umbral predeterminado,
se activa la generación de un primer par de frenado (Cmodelo) sobre una rueda delantera; y - cuando se detecta que la desviación sobrepasa el umbral y que un dispositivo de orientación de ruedas traseras está defectuoso, se activa la generación sobre una rueda delantera de un segundo par de frenado (Cesp) diferente del primer par (Cmodelo), caracterizado porque el segundo par (Cesp) viene dado por la fórmula: Cesp=Cff+Cmodelo Donde Cff es función de una diferencia entre un ángulo de giro medido (α2) y un ángulo de giro de referencia (α2 ref)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2005/050423.
Solicitante: RENAULT S.A.S..
Nacionalidad solicitante: Francia.
Dirección: 13-15 QUAI ALPHONSE LE GALLO 92100 BOULOGNE BILLANCOURT FRANCIA.
Inventor/es: GUEGAN,STEPHANE, POTHIN,RICHARD, BOUKHARI,SAMIR.
Fecha de Publicación: .
Fecha Solicitud PCT: 7 de Junio de 2005.
Fecha Concesión Europea: 8 de Septiembre de 2010.
Clasificación Internacional de Patentes:
- B60T8/1755 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Regulación de los frenos especialmente adaptada para el control de la estabilidad del vehículo, p.ej. teniendo en cuenta el ángulo de oscilación o la aceleración transversal al tomar una curva (sistemas de control de la estabilidad dinámica de los vehículos por otra forma que controlando una subunidad particular B60W 30/02).
- B60T8/88B
- B62D7/15G
- B62D9/00D
Clasificación PCT:
- B60T8/17 B60T 8/00 […] › Utilización de medios de regulación eléctricos o electrónicos para el control de la frenada.
Clasificación antigua:
- B60T8/00 B60T […] › Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10).
- B60T8/88 B60T 8/00 […] › con medios que responden a un fallo, es decir medios para detectar o indicar un funcionamiento defectuoso de los medios de control que responden a la condición de velocidad.
- B62D7/15 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 7/00 Timonería de dirección; Manguetas o su montaje (B62D 13/00 tiene prioridad; dirección asistida o de relé de potencia B62D 5/00). › caracterizada por medios que modifican la relación entre los ángulos de dirección de las ruedas directrices (variando el radio automáticamente en función de las condiciones de conducción B62D 6/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania.
Fragmento de la descripción:
La invención se refiere al accionamiento de vehículos de cuatro ruedas directrices.
Se conocen vehículos equipados con cuatro ruedas directrices con vistas a mejorar el comportamiento del vehículo, y por consiguiente la seguridad de los pasajeros del vehículo así como la comodidad de la conducción. Ciertos de estos 5 vehículos están dotados por añadidura de un sistema frenado controlable que permite frenar cada una de las cuatro ruedas individualmente. Estos vehículos comprenden también un dispositivo de control de la dirección de las ruedas traseras al menos, permitiendo uno o varios captadores estimar la velocidad longitudinal del vehículo, uno o varios medios electrónicos de cálculo, un captador de ángulo del volante, y 10 finalmente un dispositivo de frenado controlable.
Más precisamente, el sistema de frenado controlable, designado por ESP, es un dispositivo de emergencia que se activa cuando la trayectoria real del vehículo presenta una desviación demasiado importante con una trayectoria de referencia calculada por un calculador de a bordo a partir de un modelo basado en el ángulo del 15 volante y en la velocidad del vehículo. Este sistema actúa entonces hasta que el vehículo se vuelve a situar sobre una trayectoria próxima a la estimada por el modelo, es decir, hasta que el umbral de desactivación se alcance. Es así que en caso de un giro excesivo, (es decir cuando la trayectoria tiene un radio de curvatura menor que el de la trayectoria deseada), el sistema de ESP busca frenar la rueda delantera exterior. 20 Por el contrario, en caso de un viraje demasiado pequeño, (es decir cuando la trayectoria se extiende hacia el exterior de la trayectoria esperada), el sistema frena las cuatro ruedas con esfuerzos más importantes sobre las ruedas interiores, y actúa igualmente sobre el par motor. En estas condiciones, el sistema de ESP crea un momento de giro y una deceleración que permiten alcanzar la trayectoria deseada. 25
No obstante, no se puede excluir que el sistema de orientación de las ruedas tenga súbitamente un funcionamiento defectuoso ligado por ejemplo a un corte de la potencia disponible sobre el sistema o a un fallo del calculador. Si a continuación hay un giro no deseado de las ruedas traseras, el vehículo puede resultar incontrolable para el conductor. 30
Es conocido poner en relación el sistema de ESP y el sistema de orientación de las cuatro ruedas directrices en modo de funcionamiento nominal. No obstante, cuando el sistema de orientación de las ruedas es defectuoso, el sistema de ESP, en su funcionamiento nominal, no permite limitar de manera significativa la gravedad de un giro no deseado de las ruedas traseras. Se conocen así diferentes estrategias de 5 control de un sistema de orientación de las ruedas cuando el sistema está en situación de funcionamiento nominal. Una estrategia aplicable al modo degradado, se divulga en el documento DE 19643197.
Un objeto de la invención es permitir de manera significativa las consecuencias de un estado defectuoso del dispositivo de orientación de las ruedas. 10
A este efecto, se prevé de acuerdo con la invención un procedimiento de accionamiento de un vehículo, en el cual:
- cuando se detecta que una desviación de la trayectoria sobrepasa un umbral predeterminado, se activa la generación de un primer par de frenado sobre una rueda delantera; y 15
- cuando se detecta que la desviación sobrepasa el umbral y que un dispositivo de orientación de las ruedas traseras está defectuoso, se activa la generación sobre una rueda delantera de un segundo par de frenado diferente del primer par, dado el segundo par (Cesp) por la fórmula:
Cesp=Cmodelo+Cff 20
donde Cff es función de una diferencia entre el ángulo de giro medido (α2) y un ángulo de giro de referencia (α2ref).
Como se verá en lo que sigue, este procedimiento permite mejorar la estabilidad del vehículo en caso de fallo del sistema de orientación de las cuatro ruedas. Es particularmente útil cuando tiene lugar un giro no deseado de las ruedas 25 traseras.
En un modo preferido de realización, el procedimiento es puesto en práctica de la manera siguiente. Esta puesta en práctica se produce cuando se detecta un estado de avería sobre el dispositivo de orientación de las ruedas. En primer lugar, se genera un par de frenado para amortiguar la desviación de la trayectoria debida al giro no 30
deseado de las ruedas traseras. Se pone a continuación en práctica una estrategia de frenado en dos tiempos.
a. En un primer tiempo, se aplica un par de frenado transitorio para limitar lo más posible la acción de corrección del conductor durante los primeros segundos que siguen a la avería. 5
b. Pasado un periodo de algunos segundos tras la aparición de la avería, el par de frenado es progresivamente anulado. Los parámetros del dispositivo de frenado individual de las ruedas son además modificados para tener en cuenta la nueva situación.
De hecho, la estrategia así puesta en práctica puede descomponerse de la 10 manera siguiente:
- advertir al sistema de frenado de un estado de avería del sistema de orientación de las ruedas;
- calcular un par de frenado transitorio que permite reducir lo más posible la desviación de la trayectoria debida a la avería del sistema de orientación de las 15 ruedas; y
- adaptar la calibración del sistema de corrección de la trayectoria (ESP) para tener en cuenta el estado de avería del sistema de orientación de las ruedas.
El procedimiento de acuerdo con la invención podrá presentar además al menos una cualquiera de las características siguientes: 20
- el estado defectuoso forma parte del grupo constituido por:
- un funcionamiento en modo degradado; y
- una avería;
- el segundo par es función de uno al menos de los datos siguientes:
- una distancia entre ejes del vehículo; 25
- una rigidez de deriva delantera;
- una rigidez de deriva trasera;
- un radio de cuna de las ruedas; y
- una vía delantera del vehículo;
- Cff viene dado por la fórmula:
Cff=Kff.d
Donde: d es la diferencia entre el ángulo medido y el ángulo de referencia; 5
y
Kff=[L.D1.D2/(D1+D2)]x2R/e
Donde:
- L es una distancia entre ejes del vehículo;
- D1 y D2 son las rigideces de deriva delantera y trasera respectivamente; 10
- R es un radio de una de las ruedas; y
- e es una vía delantera del vehículo;
- se activa la generación del segundo par de manera que:
- el segundo par (Cesp) tiene un valor determinado durante una duración determinada; y después 15
- el segundo par (Cesp) disminuye a partir de este valor hasta el valor del primer par (Cmodelo);
- comprende además la etapa que consiste, tras la generación del segundo par, en modificar al menos un parámetro de un dispositivo de accionamiento del frenado individual de cada rueda; y 20
- estando el dispositivo de accionamiento de frenado dispuesto para desencadenarse cuando un valor predeterminado franquea al menos un umbral predeterminado, la etapa de modificación comprende la disminución del umbral o de al menos uno de los umbrales.
Otras características y ventajas de la invención resultarán además evidentes en la descripción siguiente de un modo preferido de realización dado a título de ejemplo no limitativo en referencia a los dibujos adjuntos en los cuales:
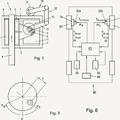
- la figura 1 es un organigrama que ilustra la estrategia en el modo preferido de realización del procedimiento de la invención; 5
- la figura 2 es una curva que ilustra la evolución en el curso del tiempo del par suplementario que interviene en la figura 1; y
- la figura 3 es una vista que ilustra la evolución de varios ángulos de giro al cabo del tiempo.
Se va a describir ahora un modo preferido de realización del procedimiento de 10 la invención. Este procedimiento es puesto en práctica a bordo de un vehículo provisto de una parte de un dispositivo de orientación individual de las cuatro ruedas del vehículo, a saber tanto las...
Reivindicaciones:
1. Procedimiento de accionamiento de un vehículo, que comprende las etapas siguientes:
- cuando se detecta que la desviación sobrepasa un umbral predeterminado, se activa la generación de un primer par de frenado (Cmodelo) sobre una rueda delantera; y 5
- cuando se detecta que la desviación sobrepasa el umbral y que un dispositivo de orientación de ruedas traseras está defectuoso, se activa la generación sobre una rueda delantera de un segundo par de frenado (Cesp) diferente del primer par (Cmodelo), caracterizado porque el segundo par (Cesp) viene dado por la fórmula:
Cesp=Cff+Cmodelo 10
Donde Cff es función de una diferencia entre un ángulo de giro medido (α2) y un ángulo de giro de referencia (α2 ref).
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque Cff viene dado por la fórmula:
Cff=Kff.d 15
Donde: d es la diferencia entre el ángulo medido y el ángulo de referencia;
y
Kff=[L.D1.D2/(D1+D2)]x2R/e
Donde:
- L es una distancia entre ejes del vehículo; 20
- D1 y D2 son las rigideces de deriva delantera y trasera respectivamente:
- R es un radio de una de las ruedas; y
- e es una vía delantera del vehículo.
3. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque el estado defectuoso forma parte del grupo constituido por: 25
- un funcionamiento en modo degradado; y
- una avería.
4. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque el segundo par (Cesp) es función de uno al menos de los datos siguientes: 5
- una distancia entre ejes del vehículo;
- una rigidez de deriva delantera;
- una rigidez de deriva trasera;
- un radio de una de las ruedas; y
- una vía delantera del vehículo. 10
5. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque se activa la generación del segundo par de manera que:
- el segundo par (Cesp) tiene un valor determinado durante una duración determinada; y después 15
- el segundo par (Cesp) disminuye a partir de este valor hasta el valor del primer par (Cmodelo).
6. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque comprende además la etapa consistente, tras la generación del segundo par, en modificar al menos un parámetro de un dispositivo de 20 accionamiento del frenado individual de cada rueda.
7. Procedimiento de acuerdo con la reivindicación precedente, caracterizado porque estando el dispositivo de accionamiento de frenado dispuesto para activarse cuando un valor predeterminado franquea al menos un umbral predeterminado, la etapa de modificación comprende la disminución del umbral o de al menos uno de los 25 umbrales.
Patentes similares o relacionadas:
Dispositivo de control de frenado y vehículo del tipo de montar a horcajadas que lo comprende, del 13 de Noviembre de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de control de frenado para un vehículo del tipo de montar a horcajadas que tiene una primera rueda , que comprende: un primer dispositivo […]
 Sistema de freno y procedimiento de frenado para un freno de fricción no lineal de accionamiento eléctrico, del 2 de Enero de 2019, de VE Vienna Engineering Forschungs- und Entwicklungs GmbH: Procedimiento de para accionar un freno de fricción de accionamiento eléctrico con un comportamiento no lineal de fuerza-desplazamiento, […]
Sistema de freno y procedimiento de frenado para un freno de fricción no lineal de accionamiento eléctrico, del 2 de Enero de 2019, de VE Vienna Engineering Forschungs- und Entwicklungs GmbH: Procedimiento de para accionar un freno de fricción de accionamiento eléctrico con un comportamiento no lineal de fuerza-desplazamiento, […]
Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco y dispositivo de control con esta finalidad, del 13 de Diciembre de 2017, de WABCO GMBH: Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco del vehículo sobre su eje longitudinal, registrando un dispositivo […]
Dispositivo de control para un sistema de frenado de un vehículo, sistema de frenado para un vehículo y método para operar un sistema de frenado de un vehículo, del 9 de Agosto de 2017, de ROBERT BOSCH GMBH: 1. Dispositivo de control para un sistema de frenado de un vehículo, con un aparato de control , mediante el cual el sistema de […]
Procedimiento de frenado automático de un vehículo automóvil, del 12 de Julio de 2017, de PSA Automobiles SA: Procedimiento de frenado automático de un vehículo automóvil, que pone en práctica una función de gestión de la dinámica longitudinal del vehículo , […]
Dispositivo de control de freno escalonado para reventón de neumático de vehículo y método de control del mismo, del 18 de Enero de 2017, de Zhejiang Geely Automobile Research Institute Co., Ltd: Un dispositivo de control de freno escalonado para reventón de neumático de vehículo, incluyendo un sensor de presión de neumático para detectar un […]
Procedimiento y dispositivo para estabilizar la marcha de un remolque que se mueve a bandazos, del 21 de Septiembre de 2016, de AUDI AG: Procedimiento para estabilizar la marcha de un remolque que se mueve a bandazos arrastrado por un vehículo, en el que se frena automáticamente […]
Procedimiento y sistema de frenado para el control de estabilidad de un vehículo, del 13 de Julio de 2016, de CONTINENTAL TEVES AG & CO. OHG: Procedimiento en el que se regula la estabilidad de conducción de un vehículo, en donde se influye sobre una diferencia de tasa de derrape por medio de un momento […]