SUJETADOR.
Sujetador para sujetar, fijar, recoger y suministrar productos delicados (P),
por ejemplo frutas o verduras, más particularmente manzanas, peras o pepinos, en el que cada producto se recoge con el sujetador (1) desde una posición que se encuentra sustancialmente horizontal, en el que el sujetador (1) comprende al menos dos superficies de acoplamiento y en el que tras el acoplamiento y la recogida, el producto está en contacto con el sujetador en una posición, al menos, de dos puntos de contacto,
caracterizado porque,
en la posición de los puntos de contacto, el sujetador comprende al menos dos tiras de acoplamiento (10a, b), que se extienden sustancialmente paralelas y opuestas entre sí, en el que estas tiras (10a, b) están conectadas a un sistema de accionamiento con el que cada una de las dos tiras está accionada de forma independiente para poder desplazarse sustancialmente en dicha dirección paralela
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NL2008/050349.
Solicitante: FPS FOOD PROCESSING SYSTEMS B.V..
Nacionalidad solicitante: Países Bajos.
Dirección: BURG. G.J.F. TIJDEMANSTRAAT 13,2631 RE NOOTDORP.
Inventor/es: CREZEE, LEONARDUS, PAULUS.
Fecha de Publicación: .
Fecha Concesión Europea: 18 de Agosto de 2010.
Clasificación Internacional de Patentes:
- B25J15/00A
- B25J15/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › con tres o más elementos en forma de dedos.
- B65G47/90 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
Clasificación PCT:
Fragmento de la descripción:
Sujetador.
La invención se refiere a un aparato tal como se describe en el preámbulo de la reivindicación 1.
Dicho sujetador es conocido, por ejemplo, por el documento EP687508. En esta publicación, se da a conocer un sujetador que está, de modo general, incorporado en serie con sujetadores idénticos en un transportador sin fin. Además, se describe cómo dicho transportador se utiliza para clasificar, en particular, productos frutícolas, en el que los sujetadores recogen los productos desde un transportador de alimentación y a continuación, después de pesarlos, sueltan los mismos con dicho sujetador hasta una pista de envasado destinada a ello. Dichos sujetadores comprenden, en particular, dos superficies del sujetador en forma de mano situadas opuestas entre sí. Dichas superficies del sujetador tienen dimensiones y están fabricadas de materiales que son sumamente adecuados para tratar dichos productos delicados.
En el documento EP1009695, se describe asimismo un sujetador para dicho objetivo, en el que los extremos de las superficies del sujetador utilizadas en ese caso están diseñados como unidades independientes que pueden girar alrededor de un eje horizontal. Dicha construcción ofrece la posibilidad de hacer girar el producto alrededor de un eje imaginario, establecido tras la sujeción, para poder observar de esta manera la superficie desde todos los lados.
Dichos sujetadores son adecuados, en particular, para recoger productos desde rodillos en los que el movimiento relativo del transportador de alimentación y de los sujetadores está dirigido de manera sustancialmente vertical alejado uno de los otros. En el caso de las situaciones en las que los productos no están alimentados por los rodillos pero están dispuestos, por ejemplo, en cubetas, tal como se da a conocer, por ejemplo, en el documento EP108445, más particularmente para productos tales como peras y pepinos, la sujeción desde cubetas es virtualmente imposible.
Para solucionar dicho inconveniente, el sujetador según la presente invención se caracteriza porque, en la posición de los puntos de contacto, el sujetador comprende al menos dos tiras de acoplamiento que se extienden sustancialmente paralelas y opuestas entre sí, en la que estas tiras están conectadas a un sistema de accionamiento con el que cada una de las dos tiras está accionada de forma independiente para poder desplazarse sustancialmente en la dirección paralela mencionada.
Con gran ventaja, con dicho sujetador, en cada posición del mismo, los productos se pueden recoger y soltar de nuevo, desde y hacia el exterior de cualquier elemento de transporte, es decir, una cinta transportadora plana, un transportador de rodillos, cajas o cubetas.
Según una realización adicional a título de ejemplo, el sujetador se caracteriza porque las tiras están guiadas, al menos, sobre un único par de extremos materiales que se extienden opuestos entre sí, tales como dedos, en la que los dedos se pueden acercar y alejar entre sí para agarrar y soltar, respectivamente.
De manera adecuada, los dedos pueden estar comprendidos en un número de más de dos, y asimismo en más de un par, de manera que se pueden utilizar muchas posibilidades para sujetar, recoger, soltar y hacer girar.
Aún en otra realización a título de ejemplo, el sujetador se caracteriza porque los dedos comprenden extremos en forma de rodillos de guía para guiar dichas tiras;
los dedos se pueden desplazar entre sí en la dirección paralela mencionada;
comprende tres tiras, en la que los extremos de las tiras, destinados al acoplamiento y la recogida, están situados y están distribuidos de manera sustancialmente uniforme sobre un círculo en un plano;
en el círculo, los extremos están en ángulos sustancialmente de 120º entre sí;
el sujetador está conectado además a un dispositivo de control para controlar el sistema de accionamiento, en el que las tiras se pueden desplazar para agarrar y recoger, suministrar y/o hacer girar dicho producto agarrado, y/o
unas con otras, las tiras componen una única tira sin fin, en la que la tira está guiada mediante un sistema de accionamiento que comprende un conjunto de rodillos y guías, en el que al menos un rodillo está accionado.
Aún en otra realización a título de ejemplo, el sujetador se caracteriza porque el dispositivo de control está conectado además a un sistema de cámaras para realizar al menos una única imagen, con la que el dispositivo de control controla el acoplamiento y la recogida, el suministro y/o el giro.
De una manera muy adecuada, con dicha única imagen, con una combinación de imágenes desde varias direcciones, o asimismo con imágenes de vídeo, se puede alimentar el dispositivo de control del sujetador de manera que el mismo siga una trayectoria trazada con precisión.
Aún en otra realización adicional, el sujetador se caracteriza porque al menos un rodillo o una guía se puede desplazar con relación al otro.
Con esto, de una manera muy adecuada, los productos se pueden agarrar, recoger y suministrar con un ángulo.
La presente invención se refiere además a un robot para recoger, trasladar y colocar productos delicados, por ejemplo frutas o verduras, más particularmente manzanas, peras o pepinos, al menos con un brazo individual del robot, que tiene en su extremo un sujetador según cualquiera de las características anteriores.
De una manera muy ventajosa, los robots equipados al menos con una de dichos sujetadores pueden tratar y procesar toda clase de tipos diferentes de productos, en particular en un entorno para clasificar y envasar los mismos.
Además, la presente invención se refiere a un método para agarrar, recoger, transportar y suministrar productos delicados, por ejemplo frutas o verduras, más particularmente manzanas, peras o pepinos, con un sujetador, en el que el sujetador está dotado al menos de dos tiras, que se extienden sustancialmente en direcciones paralelas entre sí, que se pueden desplazar de modo independiente sustancialmente en las direcciones paralelas anteriormente mencionadas, en el que el método comprende las etapas siguientes:
Con gran ventaja, los productos tales como frutas, en toda su diversidad de formas y propiedades, se pueden tratar y procesar en cualquier entorno de clasificación y envasado sin dañar dichos productos.
Las elaboraciones adicionales del método según la invención se caracterizan porque
la sujeción tiene lugar haciendo deslizar las tiras sobre el producto de manera que lo sujeten;
la sujeción tiene lugar desplazando las tiras para juntarlas, por lo que el producto queda sujeto entre las tiras;
el suministro comprende separar las tiras;
el suministro comprende desplazar al menos una de las tiras en la dirección de acoplamiento;
el suministro comprende una combinación de las características, tal como se ha mencionado anteriormente;
el método comprende además hacer girar el producto recogido, en el que las tiras mencionadas se desplazan entre sí a velocidades diferentes; y/o
el método se lleva a cabo con el sujetador según una de las características anteriormente mencionadas.
En lo que sigue, la invención se explicará haciendo referencia a los dibujos, en los que
las figuras 1 a 4 muestran esquemáticamente una realización a título de ejemplo del sujetador según la presente invención en situaciones diferentes para fijar, agarrar y recoger, con giro, respectivamente, y una variante adicional, y
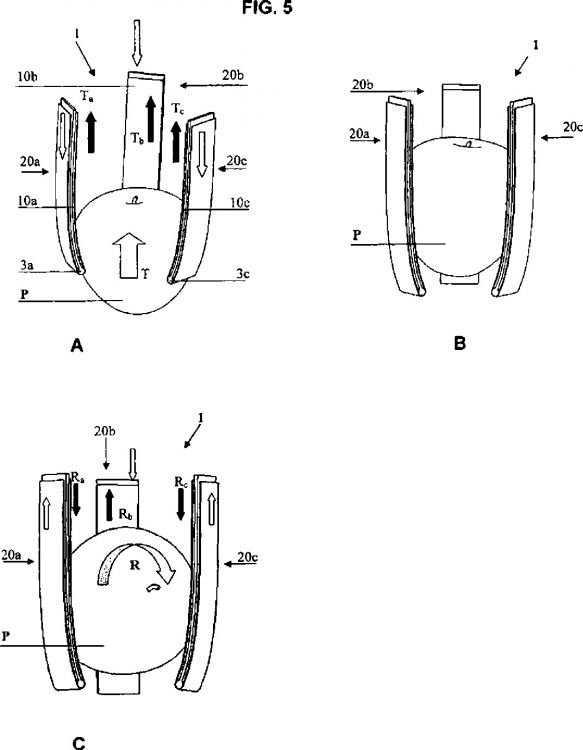
las figuras 5a, b, c muestran esquemáticamente una segunda realización a título de ejemplo del sujetador según la invención para tres situaciones diferentes. En estas figuras,...
Reivindicaciones:
1. Sujetador para sujetar, fijar, recoger y suministrar productos delicados (P), por ejemplo frutas o verduras, más particularmente manzanas, peras o pepinos, en el que cada producto se recoge con el sujetador (1) desde una posición que se encuentra sustancialmente horizontal, en el que el sujetador (1) comprende al menos dos superficies de acoplamiento y en el que tras el acoplamiento y la recogida, el producto está en contacto con el sujetador en una posición, al menos, de dos puntos de contacto,
caracterizado porque,
en la posición de los puntos de contacto, el sujetador comprende al menos dos tiras de acoplamiento (10a, b), que se extienden sustancialmente paralelas y opuestas entre sí, en el que estas tiras (10a, b) están conectadas a un sistema de accionamiento con el que cada una de las dos tiras está accionada de forma independiente para poder desplazarse sustancialmente en dicha dirección paralela.
2. Sujetador, según la reivindicación 1, caracterizado porque dichas tiras están guiadas al menos sobre un único par de extremos materiales (3a, b) que se extienden opuestos entre sí, tales como dedos (2a, b), en el que los dedos se pueden acercar y alejar entre sí para agarrar y soltar, respectivamente.
3. Sujetador, según la reivindicación 2, caracterizado porque los dedos comprenden extremos en forma de rodillos de guía para guiar dichas tiras.
4. Sujetador, según cualquiera de las reivindicaciones anteriores, caracterizado porque los dedos se pueden desplazar entre sí en dicha dirección parale-la.
5. Sujetador, según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende tres tiras, en la que los extremos de las tiras, destinados a dicho acoplamiento y a dicha recogida, están situados y están distribuidos de manera sustancialmente uniforme sobre un círculo en un plano.
6. Sujetador, según la reivindicación 5, caracterizado porque en el círculo, los extremos están en ángulos mutuos sustancialmente de 120º.
7. Sujetador, según cualquiera de las reivindicaciones anteriores, caracterizado porque el sujetador está conectado además a un dispositivo de control para controlar el sistema de accionamiento, en el que las tiras se pueden desplazar para agarrar, fijar, recoger y suministrar, y/o para hacer girar dicho producto agarrado.
8. Sujetador, según cualquiera de las reivindicaciones anteriores, caracterizado porque, unas con otras, las tiras componen una única tira sin fin, en el que la tira está guiada mediante el sistema de accionamiento que comprende un conjunto de rodillos y guías, en el que al menos un rodillo está accionado.
9. Sujetador, según cualquiera de las reivindicaciones anteriores, caracterizado porque al menos un rodillo o una guía se puede desplazar con relación al otro o a los otros.
10. Sujetador, según cualquiera de las reivindicaciones anteriores, caracterizado porque el dispositivo de control está conectado además a un sistema de cámaras fotográficas para realizar al menos una única imagen, con la que el dispositivo de control controla dicho acoplamiento y dicha recogida, dicho suministro y/o dicho giro.
11. Robot para recoger, trasladar y colocar productos delicados, por ejemplo frutas o verduras, más particularmente manzanas, peras o pepinos, al menos con un brazo individual del robot, que tiene en su extremo al menos una de dichos sujetadores según cualquiera de las reivindicaciones anteriores.
12. Método para agarrar, fijar, recoger, transportar y suministrar productos delicados (P), por ejemplo frutas o verduras, más particularmente manzanas, peras o pepinos, con un sujetador (1), en el que el sujetador está dotado al menos de dos tiras (10a, b), que se extienden sustancialmente en direcciones paralelas entre sí, que se pueden desplazar de modo independiente, sustancialmente en dichas direcciones paralelas, en el que el método comprende las etapas siguientes,
13. Método, según la reivindicación 12, caracterizado porque la sujeción tiene lugar haciendo deslizar las tiras sobre el producto de manera que lo fijen.
14. Método, según la reivindicación 12, caracterizado porque la sujeción tiene lugar desplazando las tiras una hacia la otra, por lo que se sujeta el producto entre las tiras.
15. Método, según la reivindicación 12, caracterizado porque el suministro comprende separar las tiras.
16. Método, según la reivindicación 12, caracterizado porque el suministro comprende desplazar al menos una de las tiras en la dirección de acoplamiento.
17. Método, según la reivindicación 12, caracterizado porque el suministro comprende una combinación de las características según las reivindicaciones 13 a 14.
18. Método, según cualquiera de las reivindicaciones 12 a 17, caracterizado porque el método comprende además hacer girar el producto recogido, por lo que dichas tiras se desplazan entre sí a velocidades diferentes.
19. Método, según cualquiera de las reivindicaciones 12 a 17, caracterizado porque el método se lleva a cabo con el sujetador según cualquiera de las reivindicaciones 1 a 11.
Patentes similares o relacionadas:
Estación automática para recoger artículos y procedimientos relacionados para usar, del 26 de Febrero de 2020, de CT PACK S.R.L.: Una estación automática para recoger artículos (A) que comprende: - un sistema de movimiento que comprende un transportador que define una superficie […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Mecanismo de suministro de boquilla de vertido y máquina de sellado de boquilla de vertido, del 12 de Febrero de 2020, de TOYO JIDOKI CO., LTD.: Un mecanismo de suministro de boquilla de vertido que comprende: un dispositivo de retención de boquilla de vertido para retener […]
Dispositivo para recoger y depositar selectivamente artículos en un almacén automático, del 12 de Febrero de 2020, de Modula S.p.A: Dispositivo para recoger y depositar selectivamente artículos, destinado a un almacén automático que comprende: un plano de soporte para el soporte temporal […]
Sistemas y métodos de transportador mecánico y envasado de alimentos, del 8 de Enero de 2020, de INTERCONTINENTAL GREAT BRANDS LLC: Un aparato de envasado de productos alimenticios que comprende: un transportador mecánico corriente arriba que transporta artículos […]
Dispositivo y método para transferir envases, del 23 de Octubre de 2019, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Dispositivo de transferencia para transferir envases de un dispositivo de avance de envases, en el que están alineados en al […]
DISPOSITIVO PARA RECOGER Y DESPRENDER MEDIOS ÓPTICOS, del 11 de Septiembre de 2019, de GLIFSTOCK, S.L: Dispositivo para recoger y desprender medios ópticos (Cds, DVDs y Blu-Rays), el cual se ha realizado en orden a obtener mayor facilidad y abaratar el posible mantenimiento […]
Cortadora de alto rendimiento con pinza adaptada por unión de materiales, del 7 de Agosto de 2019, de GEA Food Solutions Germany GmbH (100.0%): Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de […]