SISTEMA DE CONTROL ELECTRICO DE SILLA DE RUEDAS OMNIDIRECCIONAL.
Sistema de control eléctrico de silla de ruedas omnidireccional que os permite a movimentarse de modo omnidireccional sin mucho esfuerzo por su usuario.
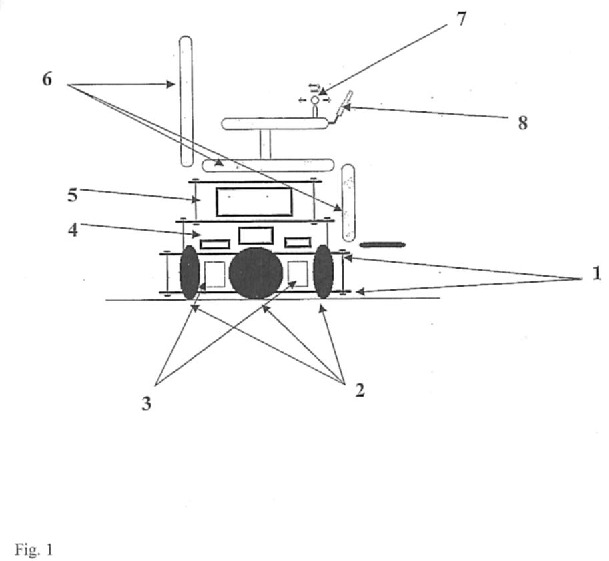
El sistema está formado en una base (1) donde las ruedas y los motores están adjuntos (2) a las baterías (3). Los equipos electrónicos necesarios para lleno funcionamiento de la silla de ruedas están situados sobre el segundo nivel (4). Sobre el próximo nivel arriba, es puesta la unidad de procesamiento (5). Sobre toda la estructura es puesto el asiento de silla de ruedas (6). Sobre su brazo es instalada una palanca de mando (o otro dispositivo de control de la silla de ruedas) (7) tanto como un visor digital (8) con el propósito de que el usuario puede escribir y interpretar toda la información de la silla de ruedas. La unidad de procesamiento también puede recibir la información de sensores ubicados por todas las partes de la silla de ruedas para evitar obstáculos automáticamente. Adicionalmente, esto sistema de control de sillade ruedas es alimentado con electricidad a través de baterías recargables o celdas de combustible (3), brindando la gran autonomía de uso
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/PT2006/000022.
Solicitante: UNIVERSIDADE DO MINHO.
Nacionalidad solicitante: Portugal.
Dirección: LARGO DO PACO,P-4704-553 BRAGA.
Fecha de Publicación: .
Fecha de Concesión: 21 de Octubre de 2010.
Clasificación Internacional de Patentes:
- A61G5/04A8
- B60B19/12 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60B RUEDAS DE VEHICULOS (fabricación de ruedas o de sus partes por laminado B21H 1/00, por forjado, martillado o prensado B21K 1/28 ); RUEDAS PEQUEÑAS PIVOTANTES; EJES PARA RUEDAS; MEJORA EN LA ADHERENCIA DE RUEDAS. › B60B 19/00 Ruedas no previstas en otro lugar o que tienen características precisadas en uno de los subgrupos del presente grupo. › Ruedas en forma de rodillo (B60B 19/06 tiene prioridad).
Clasificación PCT:
- A61G5/04 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61G MEDIOS DE TRANSPORTE, MEDIOS DE TRANSPORTE PERSONALES O DISPOSICIONES ESPECIALMENTE ADAPTADAS PARA ENFERMOS O PARA INVALIDOS (aparatos para ayudar a caminar a enfermos o a inválidos A61H 3/00 ); SILLAS O MESAS DE OPERACIONES; SILLONES DE DENTISTA; DISPOSITIVOS DE INHUMACION (embalsamado cadáveres A01N 1/00). › A61G 5/00 Sillas o medios de transporte personales especialmente adaptados para enfermos o para inválidos, p. e., sillas de ruedas (equipamientos que permiten a los enfermos o a los inválidos controlar un aparato o dispositivo que no forma parte del cuerpo A61F 4/00; bicicletas especialmente adaptadas para inválidos B62K 3/16). › a motor (A61G 5/06 tiene prioridad; elementos de apoyo accionados por motor A61G 5/12; para vehículos con manillar, equipados con tres o más ruedas B62K 5/003, B62K 5/023).
- B60B19/12 B60B 19/00 […] › Ruedas en forma de rodillo (B60B 19/06 tiene prioridad).
Fragmento de la descripción:
Sistema de control eléctrico de silla de ruedas omnidireccional.
Dominio técnico
La invención actual hace referencia a un sistema de control de silla de ruedas eléctrico que utiliza ruedas omnidireccionales operadas por motores independientes. Este sistema de control en dicha silla de ruedas, activa cada motor por separado a cada rueda, que permite tomar medidas sobre cualquier dirección sin las maniobras, como la traducción y/o la rotación sin exigir un gran esfuerzo físico del usuario.
Esta invención se refiere al sistema de control eléctrico omnidirreccional de una silla de ruedas que os permite a dichas ruedas cambiar de lugar de modo omnidireccional, utilizando una palanca de mando o cualquier otro dispositivo similar y/o un control remoto inalámbrico. Por lo tanto, el sistema de control de silla de ruedas consiste en una base con al menos 3 ruedas omnidireccionales y sus motores, una unidad de procesamiento, y una interfaz simple y fácil de usar (visor táctil) para el usuario. Este sistema de control de silla de ruedas puede ser operado por el control remoto y recibe los datos sensoriales de sensores adjuntados a la base de la silla de ruedas, para evitar obstáculos.
Adicionalmente, el sistema de control de silla de ruedas es alimentado por baterías recargables o celdas de combustible, admitiendo la autonomía de uso más larga.
Estado de la técnica
Cuando una persona sufre de una incapacidad física, normalmente, su autoestima es baja y siente muchos problemas atribuibles a su calidad de vida ser más baja que el promedio, principalmente atribuible a su falta de movilidad.
En los últimos años las personas con limitaciones físicas han beneficiado de sillas de ruedas más y más sofisticadas con más dispositivos que les ofrecen una mayor comodidad y calidad de vida. Algunas sillas de ruedas son manuales, otras contienen alguna forma de motorización que os permite ir por encima de las distancias más largas sin desgaste de su usuario, pero siempre con alguna limitación en lo que respecta a la duración de la batería.
Una silla de ruedas nos ofrece solamente un aumento en la movilidad a una persona minusválida con limitaciones de movimiento, aunque todavía reducido debido a las muchas barreras arquitectónicas todavía existentes, tan bien como ofrece mejoras en su calidad de vida, su autonomía y su autoestima.
En la actualidad, existe en el mercado, las sillas de ruedas para la mayoría de clases de incapacidad movible, con diferentes tamaños, formatos, ergonomía, motores, interfaces, etcétera.
Aunque esta variedad inmensa de sillas de ruedas, todavía son sumamente costosos y el problema más grande consiste sobre su movilidad reducida, especialmente dentro de una casa, dónde las maniobras en espacios pequeños son normalmente difíciles de hacer y sumamente fatigosas.
La necesidad para los movimientos más grandes ocurre cuando el ambiente donde la silla de ruedas se mueve es un espacio muy restringido. Existen muchas situaciones prácticas donde las sillas de ruedas convencionales son inútiles o no tan prácticas, precisamente debido a la movilidad reducida.
Tal como un coche tiene que ser movido hábilmente al aparcamiento (esta es la tarea más fatigosa realizada en cuanto se conduce un coche), lo mismo ocurre cuando un incapacitado tiene que mudarse a una casa viviente (tiene que llevar a cabo muchas maniobras).
Algunas sillas de ruedas ya vienen con motores de auxilio a la conducción, que ayudan a personas minusválidas con limitaciones físicas más grandes, o a las personas minusválidas qué necesitan de ir por distancias más largas. Todavía existen aún las limitaciones de energía debidas a las baterías de baja duración, que son normalmente sumamente pesadas y que necesitan muchas horas de recarga (normalmente 8-10 horas).
Lo documento WO8603132 describe una silla de ruedas que contiene muchas limitaciones y muchas diferencias cuando comparada con esta invención. La silla de ruedas propuesta en este documento tiene una diferente compensación circular de las ruedas, y las ruedas son diferentes. Además, no es motorizada y no ofrece la misma facilidad de uso. La silla de ruedas divulgada en lo documento WO8603132 no permite llevar a cabo ningún control automático, ni grabar cualquier tipo de datos que podrían ayudar a su usuario, en la oposición para esta invención actual. La interfaz de usuario es 1 también muy limitada y no es adaptada para ser conducida por las personas con cualquier incapacidad física. Esta silla de ruedas tiene también una autonomía reducida.
El documento JP2002029202 describe un vehículo que use cuatro ruedas omnidireccionales para llevar a cabo los movimientos en cualquier dirección. En la oposición, el sistema de invención actual, aunque también admite el uso de cuatro ruedas, puede ser equitativamente usado solamente con tres ruedas (la construcción preferida), que hace la facilidad de uso de esta silla de ruedas más accesible. Además, en la oposición para la invención en documento JP2002029202, la invención actual no necesita a una segunda persona para empujar la silla.
El documento JP2001233219 describe un vehículo que usa dos ruedas omnidireccionales y, por lo menos, una rueda de reparto. El sistema de invención actual propone el uso de, por lo menos tres ruedas omnidireccionales, que hace el uso y la facilidad de uso de esta silla de ruedas más cómodas. Además, este vehículo no es motorizado y no tiene autonomía, requiriendo la intervención de una segunda persona para ser empujado.
El documento JP2001124054 describe una silla de ruedas con cuatro ruedas omnidireccionales, no autónoma. Usando cuatro ruedas, un sistema de suspensión es necesario para garantizar que las cuatro ruedas están en contacto permanente con el piso, por lo demás el vehículo puede caer desde lo alto. En la invención actual, aunque el sistema pueda operar con cuatro ruedas, esta debe usar tres ruedas preferentemente. Lo uso de tres ruedas evita la necesidad de una suspensión.
El documento US4483405 describe una silla de ruedas con ruedas non omnidireccionales. Su capacidad omnidireccional simulada es conseguida de una manera indirecta, i.e. es necesario girar las ruedas con el vehículo parado para tomar la nueva dirección deseada. Este vehículo no es aconsejable para las personas con una grande incapacidad física o capacidad física reducida, ya que necesita la ayuda humana adicional para doblar y desplazar la silla de ruedas.
Adicionalmente, las ruedas omnidireccionales disponibles en el mercado hacen caso omiso del problema de vibración. Estas ruedas omnidireccionales, aunque también tienen un eje central y dos hileras paralelas de cilindros, producen un poco de vibración en los vehículos, en la oposición para las ruedas omnidireccionales de esta invención que no tienen vibración.
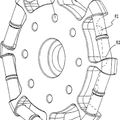
Son los cilindros los que permiten el capacidad omnidireccional de las ruedas omnidireccionales. Todavía, el perfil de volante no es completamente redondo debido a la forma de los cilindros, que genera un movimiento oscilatorio ascendente y descendente, creando un poco de malestar sobre el usuario de silla de ruedas. Comparativamente, la rueda omnidireccional de la invención actual es hecha por dos hileras (2) de cuatro segmentos con forma de pelota de Rugby, creando un perfil de la rueda completamente redondo, eliminando cualquier vibración concernida con el movimiento de la silla de ruedas.
La invención actual, promocionando una aplicación de sistema de control de silla de ruedas con ruedas de omnidireccionales, con sus propios motores, que mueven cada rueda por separado, y controlado por un dispositivo simples sobre la silla de ruedas o un remoto inalámbrico, ayudado por una interfaz simples usada para definir la dirección a seguir, resuelve el problema de movilidad de personas de capacidades físicas reducidas. También permite que su usuario aproveche una mayor capacidad de maniobra en espacios reducidos como casas de interior, cuando comparada con la silla de ruedas descrita en el "Estado de la Técnica". Adicionalmente, las baterías recargables o las células combustibles permiten que su usuario disfrute los paseos más largos con una autonomía mejorada.
Es importante señalar que la invención actual no es una combinación simples de ruedas omnidireccionales con un motor, debido a que las diferentes fuerzas independientes sean aplicadas...
Reivindicaciones:
1. Sistema de control de silla de ruedas omnidireccionales caracterizado por tener una base (1) con al menos tres ruedas omnidireccionales (2) adjuntas a la misma cantidad de motores independientes, estando cada un asociado a dichas ruedas omnidireccionales, una unidad de procesamiento de datos (5), dispositivos electrónicos esenciales para el funcionamiento del sistema (4), al menos un dispositivo de control del movimiento, control remoto (7) fijo o inalámbrico, una interfaz de comunicación entre los varios componentes del sistema, un juego de sensores y también por ser alimentado por baterías recargables (3) o celdas de combustible.
2. Sistema de control de silla de ruedas omnidireccionales, de acuerdo con la reivindicación 1, caracterizado por una base que puede tener tres ruedas omnidireccionales motorizadas, con una compensación de 120 grados entre ellas, o cuatro ruedas omnidireccionales motorizadas que san controladas por una compensación de 90 grados entre ellas.
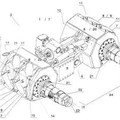
3. Sistema de control de silla de ruedas omnidireccionales, de acuerdo con las reivindicaciones anteriores, caracterizado por las ruedas que san fijadas a la base que tiene un perfil completamente redondo, con un eje central, sobre lo que lo motor se adjunta, poseyendo dos hileras paralelas compensaba 45°, cada una con 4 segmentos en forma de pelota de rugby, con dos ranuras cada una, donde la rueda es respaldada.
4. Sistema de control de silla de ruedas omnidireccionales, de acuerdo con las reivindicaciones anteriores, caracterizado por usar motores semiautomáticos individuales (sobre cada rueda omnidireccional) y siendo alimentado por una o más celdas de baterías o combustible.
5. El sistema eléctrico de silla de ruedas omnidireccionales de acuerdo con las reivindicaciones 1 a 4, caracterizado por tener una unidad de procesamiento que comunica individualmente con los motores de las ruedas omnidireccionales, con el controlador del motor, con la interfaz, con la fuente de energía y/o los sensores.
6. Sistema de control de silla de ruedas omnidireccionales, de acuerdo con la reivindicación anterior, caracterizado por la unidad de procesamiento obtener instrucciones de movimiento de silla de ruedas como parámetros de la dirección y velocidad, y por crear comandos individuales de la fuerza para enviar a cada motor.
7. Sistema de control de silla de ruedas omnidireccionales, de acuerdo con la reivindicación anterior, caracterizado por la unidad de procesamiento crear instrucciones del movimiento de tipos diferentes; la traslación, la rotación y una combinación de los dos tipos.
8. Sistema de control de silla de ruedas omnidireccionales, de acuerdo con las reivindicaciones 5 a 7, caracterizado por la unidad de procesamiento grabar continuamente toda la información del sensor y accionadores del sistema de control de silla de ruedas.
9. Sistema de control de silla de ruedas omnidireccionales, de acuerdo con la reivindicación 1, caracterizado por el dispositivo de control ser preferentemente una palanca de mando.
10. Sistema de control de silla de ruedas omnidireccionales, de acuerdo con la reivindicación 1, caracterizado por tener un control remoto inalámbrico adicional con la misma funcionalidad del comando principal de la silla de ruedas.
11. Sistema de control de silla de ruedas omnidireccionales, de acuerdo con la reivindicación 1, caracterizado por tener como interfaz un visor táctil, que es usado para comunicar toda la información entre el usuario y todos los componentes del sistema, tanto como exhibir la información grabada producida por la unidad de procesamiento.
12. Sistema de control de silla de ruedas omnidireccionales, de acuerdo con la reivindicación 1, caracterizado por tener varios sensores acoplados a la silla de ruedas que detectan obstáculos.
13. Sistema de control de silla de ruedas omnidireccionales, de acuerdo con la reivindicación anterior, caracterizado por la unidad de procesamiento calcular nuevas trayectorias para evitar los obstáculos.
Patentes similares o relacionadas:
Chasis de vehículo articulado, del 29 de Julio de 2020, de SAUDI ARABIAN OIL COMPANY: Un chasis de vehículo robótico , que comprende: - una primera sección de chasis ; - una segunda sección de chasis ; - una unión articulada […]
Ruedas para vehículos no motorizados, del 26 de Diciembre de 2018, de Gatekeeper Systems, Inc: Una rueda para un carro de propulsión humana, teniendo la rueda un primer lado axial y un segundo lado axial y estando configurada para rotar alrededor […]
Chasis del vehículo articulado, del 19 de Noviembre de 2018, de SAUDI ARABIAN OIL COMPANY: Un chasis de un vehículo robotizado para realizar movimientos a lo largo de una superficie ferromagnética y/o magnéticamente inducible, […]
Rueda omnidireccional, del 17 de Enero de 2018, de NEW LIVE INGENIERIE: Rueda omnidireccional que incluye un buje central sobre el que se monta de forma periférica una banda de rodadura constituida por una yuxtaposición […]
Rueda esférica y vehículo que implementa la rueda, del 4 de Octubre de 2017, de Aldebaran Robotics: Rueda esférica destinada a mover un vehículo , estando la rueda motorizada en rotación por un árbol que puede girar alrededor de un eje , caracterizada […]
 Disposición de rueda de rodadura de un chasis, del 7 de Agosto de 2013, de MBB Fertigungstechnik GmbH: Disposición de ruedas de rodadura de un chasis, comprendiendo el chasis una pluralidad de ruedas derodadura y comprendiendo estas, respectivamente, […]
Disposición de rueda de rodadura de un chasis, del 7 de Agosto de 2013, de MBB Fertigungstechnik GmbH: Disposición de ruedas de rodadura de un chasis, comprendiendo el chasis una pluralidad de ruedas derodadura y comprendiendo estas, respectivamente, […]
 RUEDA DIRECCIONAL MULTIPLE, del 13 de Julio de 2010, de INNOWHEEL PTY LTD: Una rueda direccional múltiple que incluye:
(a)un bastidor que tiene un cubo central rotativo alrededor de una línea axial principal […]
RUEDA DIRECCIONAL MULTIPLE, del 13 de Julio de 2010, de INNOWHEEL PTY LTD: Una rueda direccional múltiple que incluye:
(a)un bastidor que tiene un cubo central rotativo alrededor de una línea axial principal […]
 SISTEMA DE RODADURA PARA PASARELAS DE EMBARQUE DE PASAJEROS Y PROCEDIMIENTO DE CONTROL DEL MISMO, del 2 de Enero de 2012, de THYSSENKRUPP ELEVATOR INNOVATION CENTER, S.A. THYSSENKRUPP ELEVATOR (ES/PBB) LTD: Sistema de rodadura para pasarelas de embarque de pasajeros y procedimiento de control del mismo, estando dicho sistema constituido por una estructura con al menos cuatro […]
SISTEMA DE RODADURA PARA PASARELAS DE EMBARQUE DE PASAJEROS Y PROCEDIMIENTO DE CONTROL DEL MISMO, del 2 de Enero de 2012, de THYSSENKRUPP ELEVATOR INNOVATION CENTER, S.A. THYSSENKRUPP ELEVATOR (ES/PBB) LTD: Sistema de rodadura para pasarelas de embarque de pasajeros y procedimiento de control del mismo, estando dicho sistema constituido por una estructura con al menos cuatro […]