DISPOSITIVO PARA LA ESTIMACION DE FUERZAS Y PARES DE CONTACTO EN ROBOTS MANIPULADORES INDUSTRIALES Y PROCEDIMIENTO DE IMPLEMENTACION DEL MISMO.
Dispositivo para la estimación de fuerzas y pares de contacto en robots manipuladores industriales y procedimiento de implementación del mismo.
A partir de la estructuración convencional en la que al robot (1) manipulador se le establece un sensor de fuerza/par (2) situado sobre su muñeca (3), el dispositivo de la invención centra sus características en el hecho de que conjuntamente con dicho sensor participan un sensor inercial (6) así como una serie de sensores de posición (7) de las articulaciones del brazo del robot, de manera que los parámetros registrados por los diferentes sensores son interpretados a través del correspondiente software, utilizando técnicas de fusión sensorial. De forma más concreta, las medidas de posición de las articulaciones son convertidas a medidas de posición y orientación de la herramienta en el espacio cartesiano, tras lo que se procede al auto-calibrado del robot, a la posterior transformación de las medidas de los sensores al sistema de referencia adecuado, diseñando seguidamente la ganancia del observador utilizando técnicas de diseño para resolver tanto el modelo identificado como el de la herramienta, compararlos y obtener una estimación de las fuerzas y pares de contacto
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200602797.
Solicitante: UNIVERSIDAD DE JAEN.
Nacionalidad solicitante: España.
Provincia: JAÉN.
Inventor/es: GAMEZ GARCIA,JAVIER, ROBERTSSON,ANDERS, GOMEZ ORTEGA,JUAN, JOHANSSSON,ROLF.
Fecha de Solicitud: 3 de Noviembre de 2006.
Fecha de Publicación: .
Fecha de Concesión: 21 de Enero de 2010.
Clasificación Internacional de Patentes:
- B25J9/16C2
- B25J9/16H
- B25J9/16L2
- B25J9/16L4
- B25J9/16T5
- B25J9/16V
Clasificación PCT:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Fragmento de la descripción:
Dispositivo para la estimación de fuerzas y pares de contacto en robots manipuladores industriales y procedimiento de implementación del mismo.
Objeto de la invención
La presente invención se refiere a un dispositivo que ha sido especialmente concebido para realizar la medición de fuerzas y pares de contacto ejercidas por un robot manipulador a su entorno en las tres dimensiones del espacio.
El objeto de la invención es proporcionar un dispositivo de medida fiable, que permita optimizar el rendimiento del robot al que está asociado, de manera que los valores de fuerza y par tomados no se vean distorsionados por las fuerzas y pares inerciales debidos a las características propias del robot.
La invención se refiere asimismo al procedimiento de implementación del dispositivo.
La invención se sitúa pues en el ámbito de la robótica industrial.
Antecedentes de la invención
En el campo de aplicación de la invención, es necesario que los robots interaccionen con su entorno, en múltiples operaciones, tales como puede ser el pulido de una superficie, el desbarbado de otra, test de fatigas, etc. En este tipo de procesos es necesario que el robot controle la fuerza y los pares de contacto que se ejercen sobre la superficie de contacto.
Para ello, se coloca normalmente un único sensor de fuerza/par en la muñeca del robot manipulador. Sin embargo, la utilización únicamente de sensores de fuerza/par para controlar esta interacción presenta una serie de problemas, entre los que cabe destacar la aparición de perturbaciones producidas por las fuerzas y pares de inercia debidos a las propiedades dinámicas propias de la herramienta.
Obviamente, este inconveniente implica un decremento en el rendimiento de la ejecución de la tarea, en tiempo y calidad de ejecución.
Descripción de la invención
El dispositivo para la estimación de fuerzas y pares de contacto en robots manipuladores industriales que la invención propone resuelve de forma plenamente satisfactoria la problemática anteriormente expuesta, permitiendo estimar de forma precisa los valores de fuerza y par reales ejercidos sobre la superficie de interacción del robot. Este dispositivo permite discriminar de las medidas de fuerza y par las perturbaciones producidas por la dinámica del robot o herramienta de que se trate (i.e. fuerzas y pares de inercia).
Para ello, y a partir de la estructuración convencional en la que al robot manipulador se le establece un sensor de fuerza/par situado sobre su muñeca, el dispositivo de la invención centra sus características en el hecho de que conjuntamente con dicho sensor participan un sensor inercial así como una serie de sensores de posición de las articulaciones del brazo del robot.
El sensor inercial mide las aceleraciones lineales y las velocidades o aceleraciones angulares de la herramienta, mientras que los sensores de posición permiten estimar la posición concreta de la herramienta.
De ésta forma, los parámetros registrados por los diferentes sensores son interpretados a través del correspondiente software, utilizando técnicas de fusión sensorial, para obtener una estimación de la fuerza de contacto real ejercida por el robot manipulador a su entorno.
De forma más concreta, el procedimiento de implementación del dispositivo de la invención comprende las siguientes fases operativas:
- - Colocación de los sensores de fuerza/par.
- - Colocación de los sensores inerciales.
- - Conversión de las medidas tomadas por los sensores de posición de las articulaciones al espacio cartesiano.
- - Auto-calibración del dispositivo respecto del brazo de robot en el que está implantado.
- - Transformación de las medidas de los sensores a un sistema de referencia adecuado.
- - Resolución del modelo que define la dinámica de la herramienta
- - Construcción de un observador y diseño de su ganancia.
- - Comparación de ambos sistemas: modelo y observador, y obtención de la estimación de las fuerzas y pares de contacto.
Descripción de los dibujos
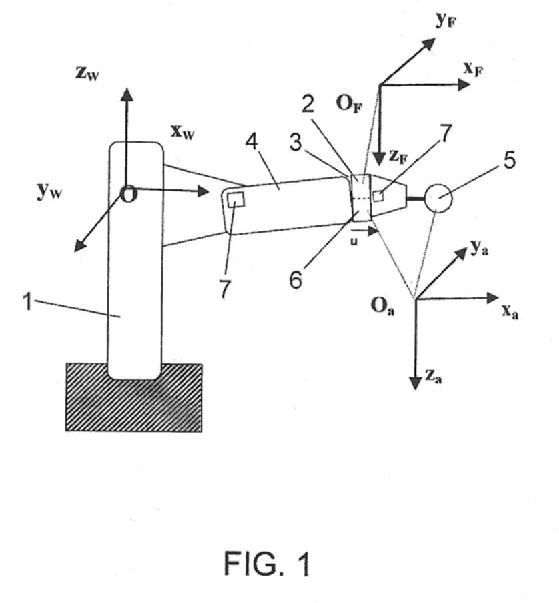
Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, una hoja única de planos en la que con carácter ilustrativo y no limitativo y en su única figura, se ha representado de forma esquemática y en alzado lateral los distintos elementos que participan en el dispositivo para la estimación de fuerzas y pares de contacto realizado de acuerdo con el objeto de la invención.
Realización preferente de la invención
A la vista de la figura reseñada puede observarse como en el dispositivo para la estimación de fuerzas que se preconiza, aplicable a cualquier tipo de robot industrial manipulador (1), participa un sensor de fuerza/par (2) que se establece entre la muñeca (3) del brazo (4) del robot manipulador (1) y la herramienta (5) de que se trate, en el que se establece un sistema de referencia (OFXFYFZF), así como un sensor inercial, (6) en el que se establece un sistema de referencia (OAXAYAZA), dotado de sensores inerciales lineales así como angulares, que registran tanto las aceleraciones lineales como las velocidades o aceleraciones angulares, que puede estar instalado indistintamente sobre la muñeca (3) del robot (1), o sobre la herramienta de trabajo (5), tal como muestra la figura.
La estructura anteriormente descrita se complementa con una serie de sensores de posición (7), cuyo número variará en función de la arquitectura del brazo robot, concretamente del número de articulaciones del mismo, y a través de los cuales, a partir del modelo cinemático o dinámico del brazo del robot permiten determinar la posición de la herramienta, así como de los dos sistemas de referencia (OFXFYFZF) y (OAXAYAZA), respecto a un sistema de referencia (OWXWYWZW) estático.
Tal y como se ha mencionado anteriormente, las distintas medidas registradas por los distintos sensores son tratadas mediante un determinado software, que incluye técnicas de fusión sensorial, en las que se diseña un estimador formado por el modelo dinámico completo de la herramienta (5) definido a partir de las ecuaciones de Newton-Euler y cuyas entradas son las medidas de los sensores numerados anteriormente, salvo en el caso de los sensores articulares de posición, que son transformadas al espacio cartesiano a través del modelo cinemática/dinámico correspondiente. También se considera como entrada las fuerzas y pares de contacto.
Igualmente el estimador incluye un observador de estado para el modelo anterior, con la salvedad de que este segundo sistema no tiene en cuenta las fuerzas y pares de contacto, teniendo un comportamiento definido a través de una serie de parámetros de configuración del estimador.
A través del citado software se compara la dinámica del modelo del sistema con la dinámica del observador obteniéndose una estimación de las fuerzas y pares de contacto con una respuesta adecuada.
Para modelar correctamente la dinámica del estimador se utilizan distintas técnicas de diseño tales como el filtro Kalman o por ubicación de polos. En cuanto a las ganancias de los sensores, offsets, ganancias del observador, masas, inercias, y demás parámetros configurables, el aparato cuenta con un procedimiento de auto-calibración en el que, tras aplicar una serie de movimientos predefinidos, éstos parámetros son identificados.
De acuerdo con lo anteriormente expuesto, el procedimiento de implementación del dispositivo sería el siguiente:
En primer lugar se procede a la colocación de un sensor (2) de fuerza/par de seis grados de libertad entre la muñeca (3) del robot manipulador (1) y la herramienta (5) de éste.
Seguidamente se procede a la colocación de uno o varios sensores inerciales (6), hasta completar los seis grados de libertad, sobre la herramienta del robot (1) que permitan medir tanto la aceleración lineal, como...
Reivindicaciones:
1. Dispositivo para la estimación de fuerzas y pares de contacto en robots manipuladores industriales, que siendo del tipo de los que están destinados a implantarse sobre el brazo articulado de un robot manipulador (1), y que comprenden al menos un sensor de fuerza/par (2) establecido en la en la muñeca (3) del citado robot manipulador, caracterizado porque junto con el citado sensor de fuerza/par (2) participan sensores inerciales, (6) tanto lineales como angulares, así como sensores de posición (7) del robot (1), incorporando un software de programación específico con técnicas de fusión sensorial para la obtención una estimación de la fuerza de contacto real ejercida por el robot manipulador a su entorno en función de los parámetros obtenidos de los diferentes sensores (2-6-7).
2. Dispositivo para la estimación de fuerzas y pares de contacto en robots manipuladores industriales, según reivindicación 1ª, caracterizado porque los sensores inerciales (6) se establecen indistintamente sobre la muñeca (5) del robot (1) o sobre la herramienta (5) del mismo.
3. Procedimiento de implementación del dispositivo de la reivindicación 1ª y 2ª, caracterizado porque comprende las siguientes fases operativas:
- - Implantación de un sensor (2) de fuerza/par de seis grados de libertad entre la muñeca (3) del robot manipulador (1) y la herramienta (5) de éste.
- - Implantación de uno o varios sensores inerciales (6), hasta completar los seis grados de libertad, sobre la herramienta del robot (1) medidores de la aceleración lineal y la aceleración o velocidad angular.
- - Conversión de las medidas de posición de las articulaciones tomadas por los sensores a las medidas de posición y orientación de la herramienta en el espacio cartesiano.
- - Autocalibración del dispositivo mediante la aplicación, por parte del robot manipulador (1), de unos movimientos predefinidos donde la herramienta se orienta de distinta forma con respecto al campo gravitacional y donde además se aplican serie de aceleraciones conocidas.
- - Transformación de las medidas de los sensores al sistema de referencia adecuado utilizando las matrices de transformación homogéneas.
- - Diseño de la ganancia del observador a partir técnicas de diseño tales como el filtro de Kalman o por ubicación de polos.
- - Resolución, tanto el modelo identificado de la herramienta como el observador propuesto.
- - Comparación de ambos modelos; el modelo identificado y el observador, y obtención de las fuerzas y pares de contacto.
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO PARA MEJORAR LA EXACTITUD DE POSICIONAMIENTO DE UN ROBOT DE TRABAJO, del 7 de Febrero de 2012, de CLAAS FERTIGUNGSTECHNIK GMBH: Procedimiento para mejorar la exactitud de posicionamiento de una instalación de mecanización de varios ejes con al menos una cabeza de mecanización, […]
 PROCEDIMIENTO Y DISPOSITIVO PARA EL CONTROL DE MANIPULADORES, del 30 de Noviembre de 2010, de KUKA ROBOTER GMBH: Procedimiento para el control de una pluralidad de manipuladores tales como robots industriales multiaxiales, donde: a) un manipulador […]
PROCEDIMIENTO Y DISPOSITIVO PARA EL CONTROL DE MANIPULADORES, del 30 de Noviembre de 2010, de KUKA ROBOTER GMBH: Procedimiento para el control de una pluralidad de manipuladores tales como robots industriales multiaxiales, donde: a) un manipulador […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]