PROCEDIMIENTO Y DISPOSITIVO PARA LA ATENUACION DE MOVIMIENTO EN MAQUINAS DE CONSTRUCCION.
Procedimiento para la atenuación de movimiento en una máquina (1) de construcción sin suspensión autopropulsada,
especialmente en un cargador de ruedas, con una cabina (1.1), una pala (1..2.2) accionada mediante un cilindro (1.4) hidráulico, una fuente hidráulica, una válvula (1.5) controlada para la alimentación del cilindro (1.4) hidráulico con fluido hidráulico, una unidad (6) de regulación con un software de control así como al menos un sensor configurado como sensor (2.1) de aceleración, comprendiendo el procedimiento las siguientes etapas de procedimien- to
a. detectar la señal de aceleración a través del sensor (2.1) de aceleración durante el desplazamiento de la máquina de construcción,
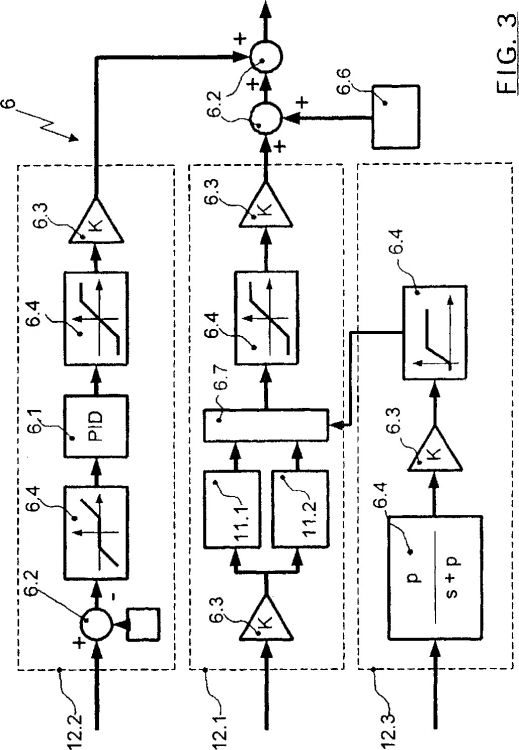
b. seleccionar un modo de amortiguación a partir de varias funciones de amortiguación adaptables depositadas en la unidad (6) de regulación para la minimización de la aceleración (5) de la cabina (1.1) y/o la minimización de la aceleración (4.2) de la pala (1.2.2),
c. procesar la señal de aceleración como magnitud de entrada a través del software de control de la unidad (6) de regulación y determinar una corriente (9) de control para la válvula (1.5) en función del modo de amortiguación seleccionado como magnitud de salida para la atenuación de movimiento y
d. alimentar el cilindro (1.4) hidráulico con fluido hidráulico a través de la válvula (1.5) en función de la corriente (9) de control
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2005/002719.
Solicitante: CNH BAUMASCHINEN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: STAAKENER STRASSE 53-63,13581 BERLIN.
Inventor/es: WEBER, JURGEN, GIANOGLIO, RENATO, SALVATORE,FREDIANI.
Fecha de Publicación: .
Fecha Concesión Europea: 6 de Enero de 2010.
Clasificación Internacional de Patentes:
- E02F9/22C2
Clasificación PCT:
- E02F9/22 CONSTRUCCIONES FIJAS. › E02 HIDRAULICA; CIMENTACIONES; MOVIMIENTO DE TIERRAS. › E02F DRAGADO; MOVIMIENTO DE TIERRAS (extracción de turba E21C 49/00). › E02F 9/00 Elementos constitutivos de las dragas o de los ingenios para el movimiento de tierras, no limitados a una de las categorías cubiertas por los grupos E02F 3/00 - E02F 7/00 (dispositivos de colocación o de recogida de cables eléctricos de arrastre B66C). › Mandos hidráulicos o neumáticos.
Clasificación antigua:
- E02F9/22 E02F 9/00 […] › Mandos hidráulicos o neumáticos.
Fragmento de la descripción:
Procedimiento y dispositivo para la atenuación de movimiento en máquinas de construcción.
La invención se refiere a un procedimiento y a un dispositivo para la atenuación de movimiento en máquinas de construcción sin suspensión autopropulsadas, especialmente en cargadores de ruedas, con un aparato de trabajo accionado mediante un cilindro hidráulico.
Muchos tipos de máquinas de construcción autopropulsadas no presentan genéricamente un sistema de amortiguación o de suspensión. Esto se debe por un lado a que para las operaciones de carga una suspensión es desventajosa debido a que cede bajo las fuerzas de elevación y de fricción, y por otro lado la puesta a disposición de un sistema de suspensión representa un despliegue constructivo elevado que está relacionado con costes de inversión y de mantenimiento considerables. Sin embargo, al buen comportamiento de desplazamiento, tal como por ejemplo agilidad y manejo, de estas máquinas de construcción sin suspensión se opone una comodidad de desplazamiento insuficiente, especialmente en el ciclo de trabajo, de transporte y de traslado.
Sin embargo, la rentabilidad de las máquinas de construcción de este tipo se determina de manera decisiva por el factor tiempo. Las máquinas de construcción autopropulsadas se cambian de sitio en muchas ocasiones de manera temporal entre diferentes sitios de construcción, desempeñando un papel decisivo el tiempo necesario para trasladar la máquina de construcción, esto es, el ciclo de traslado.
Sin embargo, un aumento de la velocidad de desplazamiento para la reducción de los tiempos de traslado en máquinas de construcción sin suspensión está relacionado estrechamente con los requisitos con respecto a la comodidad de desplazamiento y la seguridad de desplazamiento así como con respecto a las cargas para el usuario admisibles desde el punto de vista de la medicina laboral. Al superar una determinada velocidad de desplazamiento se registran impulsos y oscilaciones elevados no deseados que se introducen en la cabina del conductor.
En los últimos años se intentó por tanto, utilizando sistemas de atenuación de oscilaciones pasivos, por ejemplo en cargadores de ruedas, encontrar un compromiso entre el comportamiento de desplazamiento y la comodidad de desplazamiento de máquinas de construcción sin suspensión autopropulsadas. En cambio, hasta ahora los sistemas de atenuación de oscilaciones activos no tienen una importancia práctica debido a su complejidad y los problemas relacionados con ello en la implementación constructiva.
Por el documento DE 42 21 943 C2 se conoce una instalación hidráulica configurada como sistema de atenuación de oscilaciones pasivo para una máquina de trabajo desplazable provista de aparatos de trabajo. A este respecto está previsto que un acumulador hidráulico se emplee como sistema de suspensión de carga, estando conectados los conductos hidráulicos responsables de la elevación y el descenso del aparato de trabajo entre el cilindro de elevación y una válvula de control. Se da a conocer que para la adaptación variable de la presión de carga del acumulador hidráulico a la presión de carga respectiva del cilindro de elevación está prevista al menos una tobera en conexión con varias válvulas de distribución entre el sistema de suspensión de carga, accionándose las válvulas en conductos de control previo entre un transmisor de control previo y la válvula de control a través de presostatos. En principio en este sistema de atenuación de oscilaciones pasivo utiliza la elasticidad del acumulador hidráulico para permitir un movimiento en contrafase del equipamiento, que a su vez atenúa el movimiento de una pala con respecto a la máquina de construcción.
La desventaja de esta solución consiste en que además del acumulador hidráulico también deben preverse adicionalmente válvulas de distribución, presostatos y toberas en la máquina de construcción, lo que lleva obligatoriamente a mayores costes.
Además se conocen por el estado de la técnica los denominados sistemas de suspensión que se emplean en el ámbito de la técnica agrícola sobre todo en tractores.
A este respecto se trata de combinaciones de amortiguadores hidráulicos y resortes conectados en paralelo. La característica de amortiguación puede modificarse a este respecto en sistemas pasivos (toberas fijas) de manera fija y en sistemas activos mediante un sistema electrónico.
La diferencia fundamental entre el sistema de atenuación de oscilaciones pasivo anteriormente descrito y un sistema de suspensión radica en la estructura mecánica de las masas que se mueven, siendo el propio sistema de suspensión un elemento resorte-amortiguador que está dispuesto entre la masa del vehículo y las masas individuales de las ruedas y ejes para eliminar movimientos oscilantes no deseados de manera disipativa. Por el documento US 5.897.287 A se describe además una invención para la atenuación de movimiento de máquinas de construcción que funciona basándose en un sistema electrohidráulico para el control de los cilindros de elevación. El objetivo de esta invención consiste en garantizar una presión constante en los cilindros de elevación. Mediante un sensor de presión se vigila de manera permanente y se mantiene constante la presión en los cilindros de elevación teniendo en cuenta la ubicación de la pala para evitar un descenso no deseado de la pala.
Especialmente desventajosas en esta solución son las válvulas altamente dinámicas que son necesarias para la regulación de presión exigida, sin embargo no para la atenuación de movimiento en cargadores de ruedas. La experiencia demuestra que las excitaciones/impulsos u oscilaciones de cabeceo generados mediante el cabeceo de la pala cargada pueden compensarse bien de este modo; sin embargo, esta solución no es adecuada para las oscilaciones de cabina.
En resumen debe indicarse que los sistemas de atenuación de movimiento o de oscilaciones pasivos previamente conocidos del estado de la técnica no están optimizados, o sólo están optimizados de manera limitada, para condiciones de funcionamiento variables, y cuando se tiene en cuenta la atenuación de vibraciones de la cabina, sólo están diseñados para tareas muy específicas. Una transferencia de los sistemas de suspensión empleados en la técnica agrícola a máquinas de construcción sin suspensión no es posible por motivos de un acoplamiento fijo del eje delantero con el bastidor delantero. Con el empleo del sistema de atenuación de oscilaciones activo previamente conocido por el documento US 5.897.287 A se producen además costes muy elevados debido a un despliegue no justificado con respecto a válvulas de regulación de presión altamente dinámicas.
Por el documento US 5.832.730 se conoce un dispositivo para la atenuación de movimiento en máquinas de construcción sin suspensión autopropulsadas (por ejemplo excavadoras de cuchara). El aparato de trabajo se acciona mediante un cilindro hidráulico. Además la máquina de construcción presenta una fuente hidráulica, una válvula controlada para la alimentación del cilindro hidráulico con fluido hidráulico así como una unidad de regulación con un software de control. En el cilindro en voladizo están provistos dos sensores de presión cuyas señales de medición se procesan mediante el software de control como señales de entrada y se transforman en una señal de aceleración, a partir de la cuál se determina una corriente de control para la válvula como magnitud de salida para un movimiento compensador del cilindro hidráulico. Este dispositivo se vuelve eficaz al accionar el aparato de trabajo por parte del conductor, es decir, las señales de control del conductor se sobreexcitan automáticamente para la atenuación de movimiento, siempre que aparezcan movimientos no deseados. Una atenuación de movimiento durante el desplazamiento, independientemente del accionamiento del aparato de trabajo por parte del conductor no se da a conocer en este documento.
Por el documento US-A-5.884.204 se conoce un procedimiento para la atenuación de movimiento en máquinas de construcción sin suspensión autopropulsadas, especialmente en cargadores de ruedas, con un aparato de trabajo accionado mediante un cilindro hidráulico, una fuente hidráulica, una válvula controlada para la alimentación del cilindro hidráulico con fluido hidráulico, una unidad de regulación con un software de control así como utilizando un sensor configurado como sensor de aceleración, comprendiendo el control de la velocidad del cilindro hidráulico, basándose en una retroacción de aceleración, las...
Reivindicaciones:
1. Procedimiento para la atenuación de movimiento en una máquina (1) de construcción sin suspensión autopropulsada, especialmente en un cargador de ruedas, con una cabina (1.1), una pala (1.2.2) accionada mediante un cilindro (1.4) hidráulico, una fuente hidráulica, una válvula (1.5) controlada para la alimentación del cilindro (1.4) hidráulico con fluido hidráulico, una unidad (6) de regulación con un software de control así como al menos un sensor configurado como sensor (2.1) de aceleración, comprendiendo el procedimiento las siguientes etapas de procedimien- to:
2. Procedimiento para la atenuación de movimiento según la reivindicación 1, caracterizado porque la determinación de una corriente (9) de control para la válvula (1.5) se realiza por la unidad (6) de regulación según un primer modo de amortiguación para la amortiguación máxima de la cabina (1.1) o según un segundo modo de amortiguación para la amortiguación máxima de la pala (1.2.2).
3. Procedimiento para la atenuación de movimiento según la reivindicación 1 ó 2, caracterizado porque el modo de amortiguación se selecciona por el usuario de la máquina (1) de construcción.
4. Procedimiento para la atenuación de movimiento según la reivindicación 1 ó 2, caracterizado porque la selección del modo de amortiguación se realiza automáticamente en función del nivel de llenado de la pala (1.2.2).
5. Procedimiento para la atenuación de movimiento según la reivindicación 4, caracterizado porque para la determinación del nivel de llenado de la pala se utiliza un sensor (2.3) de presión dispuesto en el cilindro (1.4) hidráulico, cuyas señales de presión se alimentan a la unidad (6) de regulación para seleccionar de manera adaptativa a la carga un modo de amortiguación óptimo.
6. Procedimiento para la atenuación de movimiento según una o varias de las reivindicaciones 1 a 5, caracterizado porque la ubicación (10) de la pala (1.2.1) detectada por un sensor angular (2.2) se alimenta adicionalmente como magnitud de entrada adicional a la unidad (6) de regulación para contrarrestar movimientos de elevación no admisibles del cilindro hidráulico (1.4).
7. Procedimiento según una o varias de las reivindicaciones 1 a 6, caracterizado porque se diferencia entre un punto de funcionamiento de un nivel de presión y/o la velocidad de desplazamiento.
8. Dispositivo para la atenuación de movimiento en una máquina (1) de construcción sin suspensión autopropulsada, especialmente en un cargador de ruedas, con una cabina (1.1), una pala (1.2.2) accionada mediante un cilindro hidráulico (1.4), una fuente hidráulica, una válvula (1.5) controlada para la alimentación del cilindro hidráulico (1.4) con fluido hidráulico, al menos un sensor configurado como sensor (2.1) de aceleración así como una unidad (6) de regulación con un software de control, presentando la unidad (6) de regulación varias funciones de amortiguación adaptables para la minimización de la aceleración (5) de la cabina (1.1) y/o la minimización de la aceleración (4.2) de la pala (1.2.2) y estando configurada de tal manera para procesar las señales del sensor (2) mediante el software de control como señal de entrada y determinar una corriente de control para la válvula como magnitud de salida para un movimiento compensador del cilindro hidráulico (1.4) en función de un modo de amortiguación seleccionado de las funciones de amortiguación depositadas en la unidad (6) de regulación.
9. Dispositivo según la reivindicación 8, caracterizado porque la unidad (6) de regulación presenta al menos un primer modo de amortiguación para la amortiguación máxima de la cabina (1.1) y un segundo modo de amortiguación para la amortiguación máxima de la pala (1.2.2).
10. Dispositivo según la reivindicación 8 ó 9, caracterizado porque está previsto un sensor (2.3) de presión para la detección de la presión en el cilindro hidráulico (1.4) para la determinación del grado de llenado de la pala (1.2.2) como magnitud de entrada adicional para la unidad (6) de regulación para posibilitar de manera adaptativa a la carga una compensación óptima de oscilaciones.
11. Dispositivo según la reivindicación 8, 9 ó 10, caracterizado porque está previsto un sensor angular para la detección de la ubicación de la estructura (1.2.1) de elevación como magnitud de entrada adicional para la unidad (6) de regulación para contrarrestar movimientos de elevación no admisibles del cilindro (1.4) hidráulico.
12. Dispositivo según una o varias de las reivindicaciones 8 a 11, caracterizado porque el sensor (2.1) de aceleración está dispuesto en la zona de la cabina (1.1) de la máquina de construcción.
13. Dispositivo según una o varias de las reivindicaciones 8 a 12, caracterizado porque el sensor (2.1) de aceleración está dispuesto en la zona de la pala (1.2.2) de la máquina de construcción.
Patentes similares o relacionadas:
UNA PALA CARGADORA SOBRE RUEDAS QUE TIENE UN MONTAJE DE BRAZO DE PALA CARGADORA, del 13 de Julio de 2011, de J.C. BAMFORD EXCAVATORS LTD.: Una pala cargadora sobre ruedas que tiene un montaje de brazo de pala cargadora conectado por medios de pivotado a una caja de la pala cargadora sobre ruedas en […]
 MAQUINA DE CARGA, del 8 de Octubre de 2010, de J.C. BAMFORD EXCAVATORS LIMITED: Una máquina de carga con ruedas que incluye una carrocería con un brazo de carga instalado, una estructura de acoplamiento al terreno incluyendo […]
MAQUINA DE CARGA, del 8 de Octubre de 2010, de J.C. BAMFORD EXCAVATORS LIMITED: Una máquina de carga con ruedas que incluye una carrocería con un brazo de carga instalado, una estructura de acoplamiento al terreno incluyendo […]
 Máquina o vehículo de potencia con gestión de potencia, del 25 de Diciembre de 2019, de CLARK EQUIPMENT COMPANY: Un conjuntoconjunto de control, para una máquina de potencia que tiene un motor , que comprende un sensor de la velocidad del motor configurado […]
Máquina o vehículo de potencia con gestión de potencia, del 25 de Diciembre de 2019, de CLARK EQUIPMENT COMPANY: Un conjuntoconjunto de control, para una máquina de potencia que tiene un motor , que comprende un sensor de la velocidad del motor configurado […]
Seguimiento electrónico, del 7 de Agosto de 2019, de CLARK EQUIPMENT COMPANY: Una máquina motorizada que tiene un motor de combustión que puede controlar por separado unos elementos tractores laterales izquierdo y derecho (108L, 108R) para […]
Método para determinar la tasa de uso de un martillo rompedor, martillo rompedor y dispositivo de medición, del 7 de Agosto de 2019, de SANDVIK MINING AND CONSTRUCTION OY: Un método para determinar la tasa de uso de un martillo rompedor, comprendiendo el martillo rompedor un dispositivo de percusión para generar […]
Sistema de modificación de la relación de dirección para vehículo con brazo telescópico y vehículo correspondiente, del 3 de Julio de 2019, de MANITOU BF: Sistema de modificación de la relación de dirección para un vehículo con brazo telescópico inclinable, comprendiendo el vehículo ruedas directrices […]
Vehículo elevador con un brazo elevador telescópico provisto de un sistema de absorción de impactos, del 19 de Junio de 2019, de MERLO PROJECT S.R.L.: Vehículo elevador que incluye: • un chasis autopropulsado, • un brazo telescópico provisto en un extremo distal de un accesorio […]
Desplazamiento automático de sistemas de accionamiento hidráulico, del 19 de Septiembre de 2018, de CLARK EQUIPMENT COMPANY: Una máquina accionada mecánicamente que tiene un sistema de accionamiento para propulsar la máquina accionada mecánicamente sobre una […]