DETECTOR DE POSICION.
Detector de posición para el registro de movimientos de traslación y/o de rotación con al menos un imán excitador (EM),
sólo un elemento ferromagnético (FE) con al menos una bobina de inducción (SP o SP1) y con al menos un elemento sensor adicional (SE) para la obtención de informaciones sobre la polaridad y la posición del imán excitador (EM), estando estas a disposición en el momento (Ts) de la activación de un elemento ferromagnético (FE) como informaciones completas para la determinación de la dirección de movimiento del imán excitador (EM)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2003/012938.
Solicitante: MEHNERT, WALTER, DR.
THEIL, THOMAS, DR.
Nacionalidad solicitante: Alemania.
Dirección: GRILLPARZER STRASSE 6,D-85521 OTTOBRUNN.
Inventor/es: MEHNERT, WALTER, DR., THEIL, THOMAS, DR..
Fecha de Publicación: .
Fecha Concesión Europea: 28 de Abril de 2010.
Clasificación Internacional de Patentes:
- G01D5/14B1
- G01D5/20B3
- G01P3/481W
Clasificación PCT:
- G01P3/481 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 3/00 Medida de la velocidad lineal o angular; Medida de diferencias de velocidades lineales o angulares (G01P 5/00 - G01P 11/00 tienen prioridad; midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00). › teniendo las señales la forma de impulsos.
Clasificación antigua:
- G01P3/481 G01P 3/00 […] › teniendo las señales la forma de impulsos.
Fragmento de la descripción:
Detector de posición.
La invención se refiere a un detector de posición para el registro de movimientos de translación y/o de rotación empleando un elemento ferromagnético.
Tales elementos ferromagnéticos son conocidos como en la norma US 4,364,013 como los llamados detectores de movimientos de hilos de impulsos o en la norma DE 41 07 847 C1 o en la DE 28 17 169 C2 como sensores Wiegand, en los que p. ej., un material ferromagnético está envuelto por una bobina sensora. Los sectores magnéticos orientados primero irregularmente en el material ferromagnético - denominados como dominios magnéticos o como dominios de Weiss - se orientan en un único dominio bajo la influencia de fuerzas externas. Al aplicarse un campo magnético externo de determinada dirección e intensidad, este dominio se "cambia" "repentinamente", lo que provoca un impulso de tensión en la bobina sensora que se puede detectar como señal de salida.
En una variante conocida como sensor de ángulo de giro, ver p. ej., EP 0724712B1, pasan en tales hilos de impulsos distribuidos por el perímetro unos imanes de conexión y reposicionadores, de modo que los hilos de impulsos son atravesados sucesivamente por campos magnéticos de polaridad inversa. Debido a la inversión magnética de todos sus sectores magnéticos en su bobina sensora, cada hilo de impulsos genera un impulso de tensión de una longitud, amplitud y polaridad definidas. Estos impulsos de tensión se evalúan en un contador electrónico. Mediante los imanes de reposicionado se llevan de nuevo los sectores magnéticos de los hilos de impulsos al estado de partida mediante el campo de reposicionado de polaridad opuesta, de modo que el correspondiente hilo de impulsos está listo para una nueva activación de impulsos. Este modo de proceder se denomina como funcionamiento asimétrico. En el funcionamiento simétrico se genera adicionalmente en cada proceso de reposición un impulso evaluable.
Como en la norma mencionada al principio EP 0 724 712 B1, con al menos dos sensores de este tipo distribuidos por el perímetro en la dirección de movimiento, se puede extraer no sólo cada giro completo de un árbol giratorio sino además su dirección de giro teniendo en cuenta las características diferencias de posición entre el proceso de colocación y reposición con una clara asignación de los impulsos de tensión generados a la correspondiente posición angular del árbol de giro.
Debido a los, al menos, dos sensores distribuidos por el perímetro, hay que contar con un considerable coste de montaje, pues los sensores de alambres de impulsos no son lo pequeños que uno desee, por lo que, p. ej., no se pueden construir contadores de revoluciones con un diámetro pequeño. Además, estos sensores son relativamente caros.
Se sabe además que en un detector de posición de este tipo se puede determinar con ayuda de un único sensor el giro y la dirección del giro de un eje, inclinándose el sensor constituido como hilo Wiegand para la generación de impulsos dependiente de la dirección del movimiento hacia la dirección del movimiento de una sección con polaridad magnética situada enfrente del hilo Wiegand; ver el mencionado DE 28 17 169 C2. Desventajoso en una disposición de este tipo es que, como consecuencia de la polarización predeterminable aunque se puede producir una detección de la dirección de giro, sin embargo este está limitado a la dirección de giro predeterminada por la polarización, es decir, sólo a un única dirección de giro.
Para el registro de ambas direcciones de giro de un eje son necesarios asimismo al menos dos sensores de este tipo con las correspondientes conexiones de evaluación. Independientemente de ello, una disposición de este tipo adolece bajo determinadas circunstancias de un rendimiento energético muy reducido ya que el ángulo entre la dirección de movimiento y orientación de los sensores desempeña un papel determinante. Trabajas sin suministro de energía del exterior es por ello difícil con una disposición de este tipo.
Tarea de la invención es obtener en este sentido una solución.
Partiendo del hecho de que en los materiales ferromagnéticos la interacción de los momentos magnéticos de átomos vecinos con dirección de magnetización diferente es muy fuerte, lo que conduce a la orientación de los momentos en pequeños dominios, los llamados dominios Weiss, que están separados entre si por unas capas de transición, denominadas como paredes de Bloch, ahora es posible conformar de un modo permanente un único dominio de dirección unitaria de magnetización p. ej. mediante el estirado mecánico de un hilo ferromagnético. Si se coloca un dominio de este tipo en un campo magnético externo de determinado tamaño y dirección, entonces este dominio no se pliega en su totalidad sino que sus imanes elementales se despliegan desde una determinada posición inicial - preferentemente, desde el extremo de un hilo - al modo de fichas de dominó, en la dirección del campo magnético externo. Esto conduce a una onda de fustigación de velocidad finita en el elemento ferro magnético pero que es lo suficientemente grande frente a la velocidad del imán a excitar, de modo que se puede hablar de una "fustigación repentina" de estos dominios.
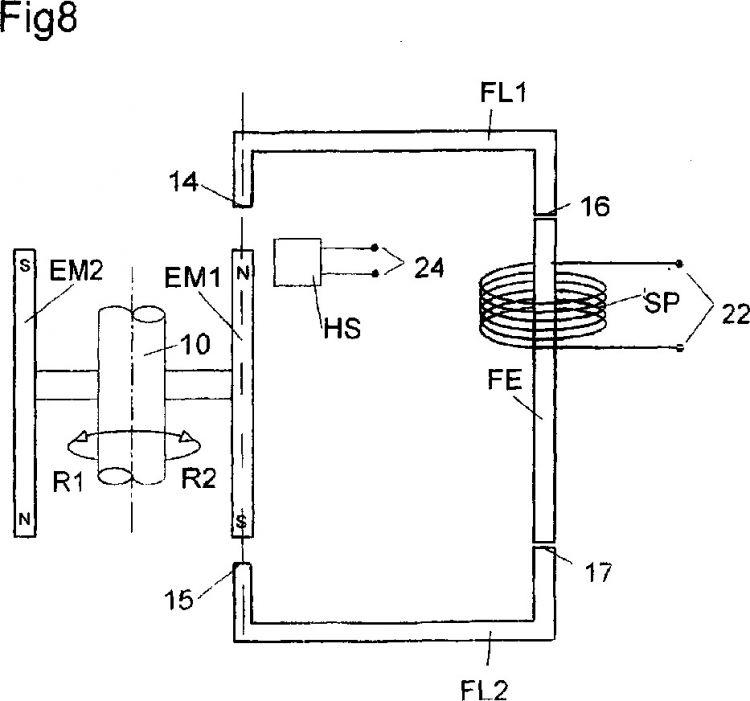
Aprovechando las relaciones físicas arriba descritas, la tarea mencionada al principio para un detector de posición del tipo aquí descrito que tenga al menos un imán excitador, se ha solucionado desde en el sentido de la invención con un único elemento ferromagnético con al menos una bobina de inducción y con al menos un elemento sensor adicional para averiguar informaciones sobre la polaridad y la posición del imán excitador, estando estas a disposición en el momento de la activación de un elemento ferromagnético como informaciones completas para determinar la dirección de movimiento del imán excitador. El efecto de la pared de Bloch que transcurre sobre el elemento ferromagnético se aprovecha en una variante especialmente sencilla de la invención de tal modo que la averiguación de la posición del imán excitador se produce mediante la determinación de la dirección de activación de la inversión magnética del elemento ferromagnético iniciable desde ambos lados frontales.
Sin embargo, no se debe confundir aquí la dirección de activación de la inversión magnética con la dirección de la misma inversión magnética, que se describe como desde qué polo magnético hasta qué polo magnético se "fustigan" las paredes Weiss. La dirección de la inversión magnética conduce en el caso presente a la polaridad del polo activante del imán excitador.
La energía cinética de los imanes elementales fustigantes en forma de una onda continua en dirección del dominio exterior es suficientemente grande no sólo para extraer de la bobina asignada al elemento ferromagnético energía eléctrica para un impulso de señal sino además para una electrónica de contador y una sonda Hall.
Si se da la posición y polaridad actuales del imán excitador EM y se aplican estas en relación a su última posición y polaridad almacenadas, entonces se poseen informaciones completas para averiguar la dirección de movimiento del imán excitador EM y del árbol giratorio unido firmemente a éste. Para una mejor comprensión de la invención se explica a continuación la misma en base al ejemplo de un contador de revoluciones.
En el caso general, que se caracteriza por un imán excitador y la activación de vuelta, se describe completamente el sistema de contador de vueltas mediante cuatro estados básicos del imán excitador en combinación con sus últimos datos almacenados, a saber:
Z1.) Polo norte a la derecha de la línea de referencia
Z2.) Polo norte a la izquierda de la línea de referencia
Z3.) Polo sur a la derecha de la línea de referencia
Z4.) Polo sur a la izquierda de la línea de referencia.
En un uso conforme a la invención de sólo un hilo de impulsos y una bobina de inducción, estas cuatro situaciones conducen a dos grupos de estados combinados en función del empleo de la dirección de activación de la inversión magnética:
Reivindicaciones:
1. Detector de posición para el registro de movimientos de traslación y/o de rotación con al menos un imán excitador (EM), sólo un elemento ferromagnético (FE) con al menos una bobina de inducción (SP o SP1) y con al menos un elemento sensor adicional (SE) para la obtención de informaciones sobre la polaridad y la posición del imán excitador (EM), estando estas a disposición en el momento (Ts) de la activación de un elemento ferromagnético (FE) como informaciones completas para la determinación de la dirección de movimiento del imán excitador (EM).
2. Detector de posición según la reivindicación 1, caracterizada porque el elemento ferromagnético (FE) es un hilo de impulsos.
3. Detector de posición según las reivindicaciones 1 y 2, caracterizado porque la bobina de inducción (SP o SP1) sirve para la medición de la dirección de la inversión magnética y en relación con el elemento sensor adicional (SE) para averiguar la dirección de la activación de la inversión magnética del elemento ferromagnético (FE).
4. Detector de posición según las reivindicaciones 1 hasta 3, caracterizado porque el elemento sensor adicional (SE) es una segunda bobina de inducción (SP2) sobre el elemento ferromagnético (FE) y sirve para averiguar la dirección de activación de la inversión magnética del elemento ferromagnético (FE).
5. Detector de posición según las reivindicaciones 1 hasta 3, caracterizado porque el elemento sensor adicional (SE) es una sonda Hall (HS) para la medición de la polaridad o la averiguación de la posición del imán excitador (EM).
6. Detector de posición según las reivindicaciones 1 hasta 5, caracterizado porque las informaciones completas que están a disposición en el momento (Ts) para la averiguación de la polaridad y dirección de movimiento del imán excitador (EM) consisten en los datos en la memoria no volátil con las señales en los bornes de salida (22, 23) de las bobinas de inducción o(SP1, SP2) o con las señales en los bornes de salida (22) de la bobina de inducción (SP) y los bornes de salida (24) de la sonda Hall (HS).
7. Detector de posición según las reivindicaciones 1 hasta 6, caracterizado porque el eje del elemento ferromagnético (FE) está orientado en paralelo a la dirección de movimiento del imán excitador (EM).
8. Detector de posición según las reivindicaciones 1 hasta 6, caracterizado porque el eje del elemento ferromagnético (FE) está orientado verticalmente a la dirección de movimiento del imán excitador (EM).
9. Detector de posición según las reivindicaciones 1 hasta 8, caracterizado porque al elemento ferromagnético (FE) está asignado al menos una pieza de conductancia de flujo (FL1 y/o FL2) para la guía del flujo y/o concentración del flujo.
10. Detector de posición según las reivindicaciones 1 hasta 9, caracterizado porque de las señales de las bobinas de inducción (SP, SP1, SP2) para la detección de la posición y/o de la polaridad, se puede deducir el suministro de energía para la electrónica de evaluación
11. Detector de posición según las reivindicaciones 1 hasta 10, caracterizado porque la electrónica de evaluación (3 = incluye al menos un dispositivo contador (38), una memoria no volátil (36) y un condensador (C).
12. Detector de posición según las reivindicaciones 1 hasta 11, caracterizado porque la memoria no volátil (36) es un FRAM y/o un EEPROM.
13. Detector de posición según una o varias de las reivindicaciones anteriores, caracterizado porque una de las bobinas (SP/SP1) es impulsada por un impulso de corriente externo que sirve bien para la activación o para un pretensado adicional del elemento ferromagnético (FE).
Patentes similares o relacionadas:
UNIDAD DE ENGRANAJE-ACCIONAMIENTO CON DETECCIÓN DEL NÚMERO DE REVOLUCIONES, del 1 de Diciembre de 2011, de ROBERT BOSCH GMBH: Unidad de engranaje-accionamiento , en especial para uso en vehículos de motor, con una rueda de accionamiento que engrana con una rueda de salida , caracterizada […]
GONIÓMETRO GUIADO A MANO, del 2 de Septiembre de 2011, de PREISSER MESSTECHNIK GMBH: Goniómetro guiado a mano con: • dos elementos de medida apoyados uno junto a otro pudiendo girar alrededor de un eje común, • medios sensores […]
 CARRIL DE GUÍA PARA UN RODAMIENTO LINEAL, del 5 de Abril de 2011, de SCHAEFFLER TECHNOLOGIES GMBH & CO. KG: Carril de guía para un rodamiento lineal, cuyo cuerpo de carril está provisto de un alojamiento para una implementación de medida que se extiende en la dirección longitudinal […]
CARRIL DE GUÍA PARA UN RODAMIENTO LINEAL, del 5 de Abril de 2011, de SCHAEFFLER TECHNOLOGIES GMBH & CO. KG: Carril de guía para un rodamiento lineal, cuyo cuerpo de carril está provisto de un alojamiento para una implementación de medida que se extiende en la dirección longitudinal […]
 PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA DESVIACIÓN DE UN REDUCTOR DE AJUSTE, del 4 de Abril de 2011, de PIERBURG GMBH: Reductor de ajuste con dispositivos para determinar la desviación que presenta un reductor de ajuste respecto a una posición de partida predeterminada, […]
PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA DESVIACIÓN DE UN REDUCTOR DE AJUSTE, del 4 de Abril de 2011, de PIERBURG GMBH: Reductor de ajuste con dispositivos para determinar la desviación que presenta un reductor de ajuste respecto a una posición de partida predeterminada, […]
 DISPOSITIVO PARA MEDIR EL DESPLAZAMIENTO DE UN OBJETO MOVIL CON RESPECTO A UN SISTEMA DE REFERENCIA FIJO, del 17 de Enero de 2011, de GALILEO ENGINEERING S.R.L.: Dispositivo para medir el desplazamiento de un objeto móvil con respecto a un sistema de referencia fijo. El objeto móvil incorpora al menos un […]
DISPOSITIVO PARA MEDIR EL DESPLAZAMIENTO DE UN OBJETO MOVIL CON RESPECTO A UN SISTEMA DE REFERENCIA FIJO, del 17 de Enero de 2011, de GALILEO ENGINEERING S.R.L.: Dispositivo para medir el desplazamiento de un objeto móvil con respecto a un sistema de referencia fijo. El objeto móvil incorpora al menos un […]
 CONCEPTO PARA LA ACTIVACION DE UN DISPOSITIVO DE JUEGO, del 22 de Octubre de 2010, de CAIROS TECHNOLOGIES AG: Pelota de juego con las siguientes características:
un sensor de campo magnético ;
un dispositivo lector para la lectura del sensor de campo […]
CONCEPTO PARA LA ACTIVACION DE UN DISPOSITIVO DE JUEGO, del 22 de Octubre de 2010, de CAIROS TECHNOLOGIES AG: Pelota de juego con las siguientes características:
un sensor de campo magnético ;
un dispositivo lector para la lectura del sensor de campo […]
 INSTALACION DE DETECCION CON UN SENSOR ANGULAR, del 22 de Septiembre de 2010, de MICRONAS GMBH: Instalación de detección con un sensor angular para una disposición formada por dos partes giratorias una con respecto a la otra, a […]
INSTALACION DE DETECCION CON UN SENSOR ANGULAR, del 22 de Septiembre de 2010, de MICRONAS GMBH: Instalación de detección con un sensor angular para una disposición formada por dos partes giratorias una con respecto a la otra, a […]
 ACOPLAMIENTO RAPIDO, del 18 de Mayo de 2010, de BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT: Acoplamiento rápido con un casquillo y un racor de conexión que pueden encastrarse uno con otro en forma soltable, presentando el casquillo una […]
ACOPLAMIENTO RAPIDO, del 18 de Mayo de 2010, de BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT: Acoplamiento rápido con un casquillo y un racor de conexión que pueden encastrarse uno con otro en forma soltable, presentando el casquillo una […]