ROBOT DE SOLDADURA.
1. Robot de soldadura, en especial en la construcción naval, en los costados de los buques,
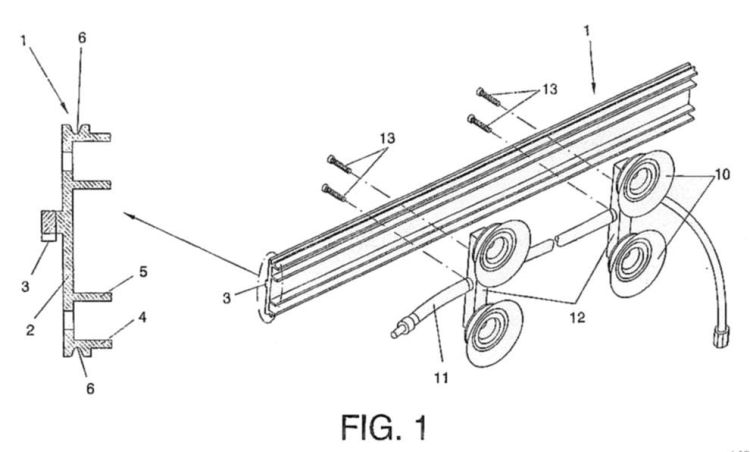
caracterizado porque incluye:#- Un sistema de fijación y guiado compuesto por un raíl (1) formado por varios tramos encadenados de un perfil de aluminio extruido, con una cremallera dentada (3) en la que engrana una corona dentada del robot para su desplazamiento motorizado a lo largo de ella, una vez que está emplazado el raíl (1) en la posición deseada mediante un dispositivo de fijación a la chapa del costado del buque o elemento de que se trate, e incluyendo dicho raíl (1) unos canales (6) de rodadura para las rulinas (5) del robot,#- un elemento tractor oscilador (9) lineal encargado de mover todos los sistemas, así como soportar la antorcha (27) de soldadura y el sistema de alimentación de hilo (23), disponiéndose éste en una bobina (24), y realizar los movimientos necesarios a la hora de soldar, controlado a distancia por el operador y a través de una cámara (36) de visión de soldadura montada en un soporte en proximidad a la antorcha (27),#- un armario de control (25) con los controles electrónicos necesarios para gobernar los movimientos del autómata tractor, a través de una pantalla de visualización del operario,#- una manguera de interconexión (26) del tractor oscilador (9) con el armario de control (25), con los cableados de manguera de potencia de soldadura, tubos de refrigeración de agua a la antorcha (27) tubos de alimentación de gas de protección y aire para refrigerar la antorcha (27), cable multipolar de señales y cable de vídeo, incluyendo en ambos extremos los conectores multipolares necesarios.#2. Robot de soldadura, según reivindicación 1, caracterizado porque el sistema de fijación es por ventosas (10) de vacío que se disponen ancladas a distancias regulares a lo largo del raíl (1) y situándose las ventosas (10) a uno y otro lado del mismo, permitiendo al cortar el aire de aspiración que todas las ventosas (10) se suelten de la superficie en la que están sujetas para cambiar la posición del raíl (1).#3. Robot de soldadura, según reivindicación 1, caracterizado porque el tractor oscilador (9) se monta en la guía (1) de desplazamiento por intermedio de una plataforma (8) portadora de las rulinas (5) de deslizamiento, dos de las cuales, las superiores, son fijas y las otras dos inferiores están montadas en una regleta (18) independiente que se fija posteriormente para montaje de la plataforma (8) en cualquier punto del raíl (1).#4. Robot de soldadura, según reivindicación 1, caracterizado porque la antorcha (27) de soldadura está montada en un brazo oscilador (31) para realizar las paradas en los extremos del raíl (1), y a través de una deslizadera motrizada vinculada a una guía (30) conectada al armario de control (25) para acercar o alejar la antorcha (27) de soldadura.#5. Robot de soldadura, según reivindicación 1, caracterizado porque incluye además un equipo de limpieza (32) que elimina la escoria entre cada pasada,vinculado a una segunda plataforma o base (33) guiada en el raíl (1) mediante rulinas (5) y portadora de un brazo (34) con una amoladora (35) de disco o cepillo de púas.#6. Robot de soldadura, según reivindicación 1, caracterizado porque incluye además un sistema de seguridad anticaídas del conjunto robot, definido por un enrollador extensible de cable de acero conectado a la parte superior del robot.
Tipo: Resumen de patente/invención.
Solicitante: TESOL, S.L.
Nacionalidad solicitante: España.
Provincia: PONTEVEDRA.
Inventor/es: COUAGO PEREZ,FERNANDO, PEREZ MEIN,JAVIER.
Fecha de Publicación: .
Clasificación PCT:
- B23K9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › Soldadura o corte por arco voltaico (soldadura eléctrica por escoria B23K 25/00; transformadores de soldadura H01F; generadores de soldadura H02K).
- B25J9/00 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
Patentes similares o relacionadas:
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES, del 31 de Julio de 2020, de Gogoa Mobility Robots, S.L: 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de: a) un actuador […]
Dispositivo exoesqueleto de movilidad de piernas con un mecanismo de accionamiento mejorado que emplea un acoplamiento magnético/eléctrico, del 22 de Julio de 2020, de Parker-Hannificn Corporation: Un dispositivo de movilidad que comprende: un conjunto de accionamiento que incluye un miembro de accionamiento rotatorio ; un componente accionado […]
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES, del 9 de Julio de 2020, de Gogoa Mobility Robots, S.L: Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por […]
Manipulación y aireación automáticas de una pila de hojas de papel, del 8 de Julio de 2020, de GRAPHIC ROBOTICS APS: Método de manipulación y de aireación de una pila de trabajo de hojas de papel rectangulares en conexión con el uso de las hojas de papel en un centro de 5 impresión, […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Accionamiento de un dispositivo que comprende brazos mecánicos, del 17 de Junio de 2020, de Memic Innovative Surgery Ltd: Un mecanismo para accionar el movimiento de un eje que tiene dos grados de libertad, que comprende: un primer engranaje configurado […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]