METODO Y APARATO PARA EL EXACTO POSICIONAMIENTO DE UN DISPOSITIVO PIPETEADOR.
Un método para la determinación de una posición de referencia para una aguja de pipeteado,
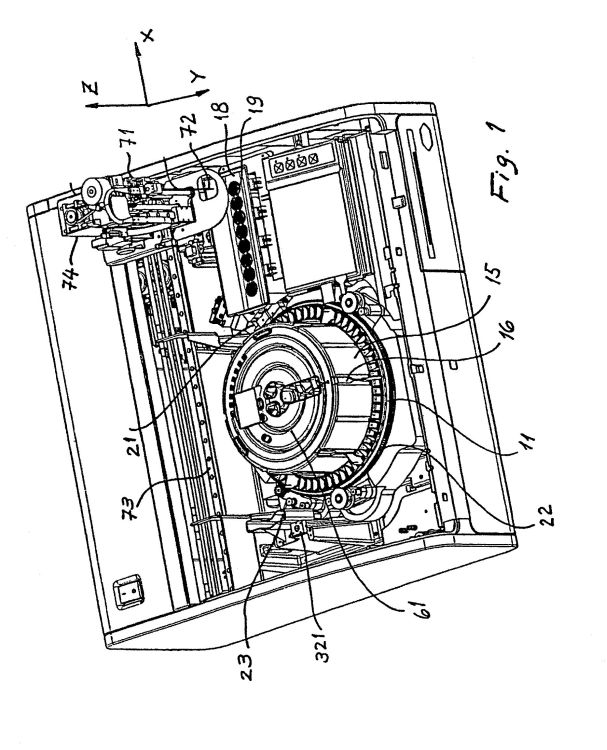
la cual forma parte de un aparato analítico automático el cual comprende (a) un transportador rotativo (11) para transportar cubetas de reacción (31) a lo largo de una trayectoria circular, (b) unos medios de conducción del transportador (22) para la rotación de dicho transportador de una manera paso a paso, (c) una unidad de pipeteado automático (71) que tiene una aguja de pipeteado (72) para pipetear muestras y reactivos dentro de dichas cubetas de reacción (31), formando con ello mezclas líquidas de muestra-reactivo, dicha unidad de pipeteado automático (71) tiene un dispositivo de transporte de la aguja para mover dicha aguja de pipeteado a lo largo de una línea recta en una primera dirección (eje X-) a una pluralidad de posiciones de pipeteado todas las cuales tienen centros que están en uno y el mismo plano vertical (plano X-Z) el cual pasa a través de dicha línea recta, dicho dispositivo de transporte de la aguja comprende un mecanismo excéntrico para el movimiento de dicha aguja de pipeteado a lo largo de una trayectoria circular y manteniendo el eje longitudinal de dicha aguja, paralelo al eje vertical, (d) medios de detección del nivel, para detectar el contacto de dicha aguja de pipeteado con la superficie líquida en un recipiente o con una parte metálica de dicho aparato, y (e) un miembro de referencia (321) para la determinación de una posición de referencia, comprendiendo dicho método (i) un primer paso de medición para la medición de un primer error de desplazamiento (DeltaX) en un desplazamiento de dicha aguja de pipeteado efectuado por dicho dispositivo de transporte a lo largo de dicha línea recta en dicha primera dirección (eje X-), estando causado dicho primer error (DeltaX) por un correspondiente primer error angular (psi) de una posición angular inicial de dicha aguja de pipeteado a lo largo de dicha trayectoria circular determinada por dicho mecanismo excéntrico, comprendiendo dicho primer paso de medición la actuación del mecanismo excéntrico de la aguja de pipeteado para llevar la aguja en contacto con el miembro de referencia, (ii) un primer paso de corrección para la corrección de dicho primer error del desplazamiento (DeltaX) por medio de una correspondiente corrección de dicho error angular (psi) de dicha posición angular inicial de dicha aguja de pipeteado, (iii) un segundo paso de medición para la medición de un segundo error de desplazamiento (DeltaY) en un desplazamiento de dicha aguja de pipeteado en una segunda dirección (eje Y-) perpendicular a dicho plano vertical, siendo causado dicho segundo error de desplazamiento (DeltaY) por un correspondiente segundo error angular (alfa) de una posición angular inicial de dicha aguja de pipeteado a lo largo de dicha trayectoria circular determinada por dicho mecanismo excéntrico, comprendiendo dicho segundo paso de medición la actuación del mecanismo excéntrico de la aguja de pipeteado para llevar la aguja en contacto con el miembro de referencia, (iv) un segundo paso de corrección para la corrección de dicho segundo error de desplazamiento (DeltaY) mediante un correspondiente cambio (alfa) de la posición angular de dicha aguja de pipeteado a lo largo de dicha trayectoria circular, (v) un tercer paso de medición para la determinación de la posición de una línea de referencia vertical siendo dicha línea de referencia una línea en donde dicha aguja de pipeteado contacta con una primera superficie plana fija de referencia en el aparato, estando dicha primera superficie plana en un plano (Y-Z) perpendicular a dicha línea recta en dicha primera dirección (eje X), y (vi) un cuarto paso de medición para la determinación de la posición de un punto de referencia (X 0, Y 0, Z 0) a lo largo de dicha línea de referencia, siendo dicho punto de referencia el punto en donde la punta de dicha aguja de pipeteado contacta con una segunda superficie plana fija de referencia en el aparato, estando dicha segunda superficie plana de referencia en un plano (X-Z) perpendicular a dicha línea de referencia.
Tipo: Resumen de patente/invención.
Solicitante: F. HOFFMANN-LA ROCHE AG
ROCHE DIAGNOSTICS GMBH.
Nacionalidad solicitante: Suiza.
Dirección: GRENZACHERSTRASSE 124,4070 BASEL.
Inventor/es: SIGRIST,ROLF.
Fecha de Publicación: .
Fecha Solicitud PCT: 21 de Septiembre de 2005.
Fecha Concesión Europea: 20 de Agosto de 2008.
Clasificación PCT:
- G01N35/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 35/00 Análisis automático no limitado a procedimientos o a materiales tratados en uno sólo de los grupos G01N 1/00 - G01N 33/00; Manipulación de materiales a este efecto. › Dispositivos para transferir las muestras hacia, en, o desde el aparato de análisis, p. ej. dispositivos de aspiración, dispositivos de inyección.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
Selección automática de microorganismos e identificación usando MALDI, del 22 de Julio de 2020, de BD Kiestra B.V: Un método que comprende: - proporcionar una placa de cultivo que comprende una cantidad de colonias de microorganismos ; - obtener […]
Cabeza dosificadora, dispositivo dosificador, que comprende una cabeza dosificadora y procedimiento para la dosificación por medio de una cabeza dosificadora, del 15 de Julio de 2020, de EPPENDORF AG: Cabeza dosificadora para un dispositivo automático dosificador u otro dispositivo dosificador, que comprende: comprende: · al menos un cuello , que presenta las […]
Analizador y método de análisis que usan un recipiente de puntas con cubierta, del 1 de Julio de 2020, de SYSMEX CORPORATION: Analizador que comprende: unos medios para montar un recipiente de líquido; una pluralidad de medios para montar, cada uno, uno de una pluralidad […]
Control de retroalimentación para la detección mejorada de células raras, del 17 de Junio de 2020, de SIEMENS HEALTHCARE DIAGNOSTICS INC.: Sistema automatizado para la filtración de una muestra y para la detección de células raras de una muestra, comprendiendo el sistema: un aparato […]
Método para detectar células o partículas en un recipiente de líquido, del 3 de Junio de 2020, de cytena GmbH: Método para detectar células o partículas en un recipiente de líquido transparente , que comprende: dispensar una gota que vuela libremente y en la cual […]
Distribución controlada de muestras sobre sustratos, del 27 de Mayo de 2020, de Roche Diagnostics Hematology, Inc: Un procedimiento para distribuir una muestra de líquido sobre un sustrato , comprendiendo el procedimiento: obtener una […]
Procedimiento para proporcionar una mezcla de reacción y aparato de análisis automático, del 20 de Mayo de 2020, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Procedimiento para proporcionar una mezcla de reacción consistente en una mezcla de un líquido a analizar y por lo menos un líquido reactivo en un recipiente […]
Soporte para un dispositivo de pipeteado para un aparato de análisis automático, del 13 de Mayo de 2020, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Soporte para un dispositivo de pipeteado para un aparato de análisis automático, el dispositivo de pipeteado comprende un cuerpo de […]