MANIPULADOR QUIRURGICO PARA UN SISTEMA TELERROBOTICO.
LA INVENCION SE REFIERE A UN CONJUNTO MANIPULADOR (2) PARA SUJETAR Y MANIPULAR IN INSTRUMENTO QUIRURGICO (14) DE UN SISTEMA TELERROBOTICO.
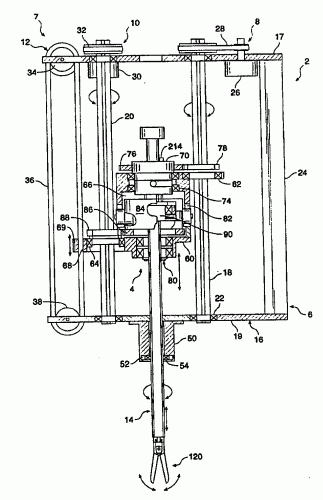
EL CONJUNTO MANIPULADOR COMPRENDE UN PORTAINSTRUMENTOS ACOPLADO DE FORMA EXTRAIBLE A UN CONJUNTO DE ACCIONAMIENTO DE MODO QUE EL PORTAINSTRUMENTOS SE PUEDA ESTERILIZAR. EL CONJUNTO COMPRENDE ADEMAS UN ELEMENTO DETECTOR DE FUERZAS (52) MONTADO A UNA CIERTA DISTANCIA DEL PORTAINSTRUMENTOS Y DEL CONJUNTO DE ACCIONAMIENTO PARA DETECTAR LAS FUERZAS EJERCIDAS AL INSTRUMENTO QUIRURGICO Y PROPORCIONAR INFORMACION SOBRE LOS RESULTADOS AL CIRUJANO. LA INVENCION TAMBIEN SE REFIERE A UN SISTEMA Y A UN METODO PARA SUJETAR DE FORMA LIBERABLE UN INSTRUMENTO QUIRURGICO (14). EL SISTEMA COMPRENDE UN SOPORTE PARA INSTRUMENTOS PARA ENCLAVAR AUTOMATICAMENTE UNAS ESPIGAS DE MONTAJE QUE HAY SOBRE EL INSTRUMENTO DENTRO DE UNAS RANURAS DE ENCLAVAMIENTO QUE HAY SOBRE EL PORTAINSTRUMENTOS PARA ACOPLAR DE FORMA LIBERABLE EL INSTRUMENTO AL PORTAINSTRUMENTOS. CON MOVIMIENTO DE ENCLAVAMIENTO POR TORSION, EL CIRUJANO PUEDE MONTAR Y DESMONTAR RAPIDAMENTE VARIOS INSTRUMENTOS EN EL PORTAINSTRUMENTOS DURANTE UNA OPERACION QUIRURGICA, TAL COMO UNA CIRUGIA ABIERTA, LAPAROSCOPIA O TORACOSCOPIA.
Tipo: Resumen de patente/invención.
Solicitante: SRI INTERNATIONAL.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 333 RAVENSWOOD AVENUE,MENLO PARK, CALIFORNIA 94025-3.
Inventor/es: JENSEN, JOEL, F., HILL, JOHN, W.
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Junio de 1996.
Fecha Concesión Europea: 10 de Agosto de 2005.
Clasificación Internacional de Patentes:
- A61B17/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00).
- A61B19/00
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Mónaco, Irlanda, Finlandia, Oficina Europea de Patentes.
Patentes similares o relacionadas:
 Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Adaptadores quirúrgicos para usar entre el conjunto de mango quirúrgico y las unidades de carga quirúrgica, del 22 de Julio de 2020, de Covidien LP (100.0%): Un conjunto adaptador para interconectar selectivamente una unidad de carga quirúrgica y un conjunto de mango que tiene al menos un […]
Sistemas para el tratamiento de enfermedades del ojo, del 22 de Julio de 2020, de ALCON, INC: Un dispositivo para tratar un ojo de mamífero que tiene un párpado , que comprende: un escudo escleral que puede posicionarse cerca de una superficie […]
Herramienta de pinza de agarre, del 22 de Julio de 2020, de COLOPLAST A/S: Herramienta de pinza de agarre para extraer una endoprótesis desde un paciente, que comprende: una carcasa de mango que forma una parte […]
Aparatos de grapado quirúrgico, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aparato de grapado quirúrgico , que comprende: una carcasa que tiene un actuador ; un miembro alargado que se extiende desde la carcasa; […]
Aplicadores que tienen sujetadores implantables para braquiterapia, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aplicador de sujetadores que comprende: una porción de cuerpo que incluye un conjunto de mango ; un conjunto […]
Interfaz de manipulador robótico para herramientas quirúrgicas articuladas, del 8 de Julio de 2020, de Microsure B.V: Interfaz de manipulador robótico para acoplar una herramienta quirúrgica articulada a un manipulador de un robot quirúrgico, comprendiendo […]
Implante quirúrgico para la reparación de la pared muscular, del 1 de Julio de 2020, de JOHNSON & JOHNSON MEDICAL GMBH: Un implante quirúrgico adaptado para reparar un defecto del tejido o de la pared muscular, que comprende una sección exterior y una sección interior (6; […]