Traductores de polímeros electroactivos.
Un transductor para la conversión de energía eléctrica en energía mecánica,
comprendiendo el transductor:por lo menos dos electrodos;
un polímero previamente deformado dispuesto de forma que de lugar a que una porción del polímero se flexecon respecto a una primera posición, con una primera área superficial, hasta una segunda posición, con unasegunda área superficial, en respuesta a un cambio en el campo eléctrico;
un miembro rígido acoplado al polímero, caracterizado porque el polímero comprende una superficie nouniforme, en el que la superficie no uniforme es texturada.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07015635.
Solicitante: SRI INTERNATIONAL.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 333 Ravenswood Avenue Menlo Park California 94025-3493 ESTADOS UNIDOS DE AMERICA.
Inventor/es: PELRINE, RONALD, E., PEI,Qibing, OH,SEAJIN, KORNBLUH,ROY D, JOSEPH,JOSE P.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F04B35/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F04 MAQUINAS DE LIQUIDOS DE DESPLAZAMIENTO POSITIVO; BOMBAS PARA LIQUIDOS O PARA FLUIDOS COMPRESIBLES. › F04B MAQUINAS DE DESPLAZAMIENTO POSITIVO PARA LIQUIDOS; BOMBAS (máquinas para líquidos o bombas, de tipo pistón rotativo u oscilante F04C; bombas de desplazamiento no positivo F04D; bombeo de fluido por contacto directo con otro fluido o por utilización de la inercia del fluido para bombear F04F). › Bombas de pistón especialmente adaptadas para fluídos compresibles caracterizadas por los medios de accionamiento de sus órganos de trabajo o por la combinación o adaptación con las máquinas o motores particulares que las accionan, no previstas en otro lugar.
- F04B35/04 F04B […] › F04B 35/00 Bombas de pistón especialmente adaptadas para fluídos compresibles caracterizadas por los medios de accionamiento de sus órganos de trabajo o por la combinación o adaptación con las máquinas o motores particulares que las accionan, no previstas en otro lugar. › siendo los medios eléctricos.
- F04B43/04 F04B […] › F04B 43/00 Máquinas, bombas o instalaciones de bombeo con órganos de trabajo flexibles (bombas o instalaciones de bombeo especialmente adaptadas para fluidos compresibles F04B 45/00). › Bombas que tienen accionamiento eléctrico.
- H01L41/047 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01L DISPOSITIVOS SEMICONDUCTORES; DISPOSITIVOS ELECTRICOS DE ESTADO SOLIDO NO PREVISTOS EN OTRO LUGAR (utilización de dispositivos semiconductores para medida G01; resistencias en general H01C; imanes, inductancias, transformadores H01F; condensadores en general H01G; dispositivos electrolíticos H01G 9/00; pilas, acumuladores H01M; guías de ondas, resonadores o líneas del tipo guía de ondas H01P; conectadores de líneas, colectores de corriente H01R; dispositivos de emisión estimulada H01S; resonadores electromecánicos H03H; altavoces, micrófonos, cabezas de lectura para gramófonos o transductores acústicos electromecánicos análogos H04R; fuentes de luz eléctricas en general H05B; circuitos impresos, circuitos híbridos, envolturas o detalles de construcción de aparatos eléctricos, fabricación de conjuntos de componentes eléctricos H05K; empleo de dispositivos semiconductores en circuitos que tienen una aplicación particular, ver la subclase relativa a la aplicación). › H01L 41/00 Dispositivos piezoeléctricos en general; Dispositivos electroestrictivos en general; Dispositivos magnetoestrictivos en general; Procedimientos o aparatos especialmente adaptados a la fabricación o tratamiento de estos dispositivos, o de sus partes constitutivas; Detalles (dispositivos consistentes en una pluralidad de componentes de estado sólido formados en o sobre un sustrato común H01L 27/00). › Electrodos.
- H01L41/09 H01L 41/00 […] › de entrada eléctrica y salida mecánica.
- H01L41/193 H01L 41/00 […] › Composiciones macromoleculares.
- H01L41/26
- H02N2/02 H […] › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02N MAQUINAS ELECTRICAS NO PREVISTAS EN OTRO LUGAR. › H02N 2/00 Máquinas eléctricas en general que utilizan el efecto piezoeléctrico, la electroestricción o la magnetoestricción (producción de vibraciones mecánicas en general B06B; elementos piezoeléctricos electroestrictivos o magnetoestrictivos en general H01L 41/00). › que producen un movimiento lineal, p. ej. actuadores; Posicionadores lineales.
- H04R19/02 H […] › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04R ALTAVOCES, MICROFONOS, CABEZAS DE LECTURA PARA GRAMOFONOS O TRANSDUCTORES ACUSTICOS ELECTROMECANICOS ANALOGOS; APARATOS PARA SORDOS; SISTEMAS PARA ANUNCIOS EN PUBLICO (producción de sonidos cuya frecuencia no está determinada por la frecuencia de alimentación G10K). › H04R 19/00 Transductores electroestáticos. › Altavoces (H04R 19/01 tiene prioridad).
- H04R23/00 H04R […] › Transductores distintos de los comprendidos por los grupos H04R 9/00 - H04R 21/00.
PDF original: ES-2394501_T3.pdf
Fragmento de la descripción:
Transductores de polímeros electroactivos Antecedentes de la invención La presente invención se refiere, en general, a polímeros electroactivos que convierten energía eléctrica en energía mecánica. Más particularmente, la presente invención se refiere a polímeros previamente deformados y a su uso en accionadores y aplicaciones varias. La presente invención se refiere, también, a electrodos adaptables usados para la comunicación eléctrica con polímeros electroactivos y a procedimientos de fabricación de polímeros previamente deformados.
En muchas aplicaciones, es deseable convertir de energía eléctrica en energía mecánica. Las aplicaciones a modo de ejemplo que requieren la conversión de energía mecánica a eléctrica incluyen robótica, bombas, altavoces, automatización general, unidades de disco y dispositivos protésicos. Estas aplicaciones incluyen uno o más accionadores que convierten energía eléctrica en trabajo mecánico – a un nivel macroscópico o microscópico. Las tecnologías de accionadores eléctricos comunes, tal como solenoides y motores electromagnéticos, no son adecuadas para muchas de estas aplicaciones, por ejemplo, cuando el tamaño de dispositivo requerido es pequeño (por ejemplo, máquinas a escala microscópica o intermedia) . Estas tecnologías tampoco son ideales cuando un gran número de dispositivos ha de integrarse en una única estructura o bajo varias condiciones de rendimiento, tal como cuando una salida de densidad de potencia alta se requiere a unas frecuencias relativamente bajas.
Varios ‘materiales inteligentes’ se han usado para convertir entre energía eléctrica y mecánica con un éxito limitado. Estos materiales inteligentes incluyen las cerámicas piezoeléctricas, las aleaciones con memoria de forma y los materiales magnetoestrictivos. No obstante, cada material inteligente tiene un número de limitaciones que evitan su uso extendido. Ciertas cerámicas piezoeléctricas, tal como el titanato de plomo-zirconio (PZT) , se han usado para convertir la energía de eléctrica en mecánica. A pesar de que tienen una eficiencia adecuada para unas pocas aplicaciones, estas cerámicas piezoeléctricas se limitan típicamente a una deformación inferior a aproximadamente un 1, 6 por ciento y, a menudo, no son adecuadas para las aplicaciones que requieran unas deformaciones más grandes que esta. Además, la alta densidad de estos materiales a menudo las excluye de aplicaciones que requieran un peso bajo. El poli (difluoruro de vinilideno) irradiado (PVDF) es un polímero electroactivo que, según se notifica, tiene una deformación de hasta un 4 por ciento cuando se convierte la energía de mecánica en eléctrica. De forma similar a las cerámicas piezoeléctricas, a menudo el PVDF no es adecuado para las aplicaciones que requieran unas deformaciones más grandes que un 4 por ciento. Las aleaciones con memoria de forma, tal como nitinol, son capaces de unas deformaciones y salidas de fuerza grandes. El uso amplio de estas aleaciones con memoria de forma ha estado limitado por una eficiencia energética inaceptable, un pobre tiempo de respuesta y un coste prohibitivo.
Además de las limitaciones de rendimiento de las cerámicas piezoeléctricas y el PVDF irradiado, su fabricación a menudo presenta una barrera para la aceptabilidad. Las cerámicas piezoeléctricas de cristal único han de hacerse crecer a unas temperaturas altas junto con un procedimiento de enfriamiento muy lento. El PVDF irradiado ha de exponerse a un haz de electrones para su procesamiento. Ambos de estos procedimientos son costosos y complejos y pueden limitar la aceptabilidad de estos materiales.
A la vista de lo anterior, serían deseables unos dispositivos alternativos que convierten la energía de mecánica en eléctrica.
Los dispositivos de polímero electroactivo de acuerdo con el estado de la técnica se dan a conocer por Ronald E. Pelrine y col., “Electrostriction of polimer dielectrics with compliant electrodes as a means of actuation”, Sensors and Actuators A, vol. 64, págs 77-85, (1998) .
Sumario de la invención En un aspecto, la presente invención tal como se define por las reivindicaciones 1 y 26 se refiere a polímeros que se deforman previamente para mejorar la conversión entre energía eléctrica y mecánica. Cuando un voltaje se aplica a unos electrodos en contacto con un polímero previamente deformado, el polímero se flexa. Esta deflexión puede usarse para realizar un trabajo mecánico. La deformación previa mejora la respuesta mecánica de un polímero electroactivo en relación con un polímero no deformado. La deformación previa puede variar en diferentes direcciones de un polímero para variar la respuesta del polímero para el voltaje aplicado.
En otro aspecto, la presente invención se refiere a un procedimiento de fabricación de un transductor que incluye un polímero previamente deformado. El procedimiento comprende deformar previamente un polímero electroactivo para formar el polímero previamente deformado. El procedimiento también comprende fijar una porción del polímero previamente deformado a un miembro sólido. El procedimiento comprende adicionalmente formar uno o más electrodos sobre el polímero previamente deformado.
Estas y otras características y ventajas de la presente invención se describirán en la siguiente descripción de la invención y las figuras asociadas.
Breve descripción de los dibujos Las figuras 1A y 1B ilustran una vista en perspectiva desde arriba de un transductor antes y después de la aplicación de un voltaje.
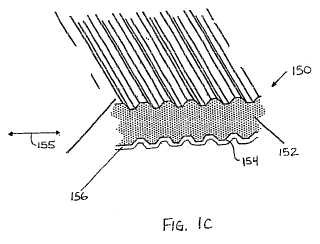
La figura 1C ilustra una superficie con textura para un polímero electroactivo que tiene un perfil de tipo onda.
La figura 1D ilustra un polímero electroactivo que incluye una superficie con textura que tiene una textura aleatoria.
La figura 1E ilustra una vista lateral en sección transversal de un accionador de diafragma que incluye un
polímero electroactivo antes de la aplicación de un voltaje.
La figura 1F ilustra una vista en sección transversal del diafragma de polímero electroactivo de la figura 1E después de la aplicación de un voltaje.
Las figuras 2A y 2B ilustran un accionador de arco antes y después del accionamiento.
La figura 2C ilustra un accionador de arco que incluye unos componentes adicionales para mejorar la deflexión.
La figura 2D y 2E ilustran un accionador de movimiento lineal antes y después del accionamiento.
La figura 2F ilustra una vista lateral en sección transversal de un accionador que incluye múltiples capas de
polímero.
La figura 2G ilustra un accionador de múltiples capas apiladas como un ejemplo de un músculo artificial.
La figura 2H ilustra un accionador lineal que comprende un diafragma de polímero electroactivo.
La figura 2I ilustra un accionador de tipo oruga que incluye un polímero electroactivo enrollado.
La figura 2J ilustra un accionador de película estirada para proporcionar una deflexión en una dirección.
La figura 2K ilustra un accionador de barra de flexión.
La figura 2L ilustra el accionador de barra de flexión de la figura 2K con un ángulo de flexión de 90 grados.
La figura 2M ilustra un accionador de barra de flexión que incluye dos capas de polímero.
La figura 3 ilustra un electrodo con estructura que proporciona una adaptabilidad unidireccional.
La figura 4 ilustra un polímero previamente deformado que comprende un electrodo con estructura que no es
direccionalmente adaptable.
La figura 5 ilustra unos electrodos con textura de acuerdo con una realización de la presente invención.
La figura 6 ilustra un sistema de bombeo en dos etapas en cascada que incluye dos bombas de accionador de
diafragma.
La figura 7A ilustra un flujo de procedimiento para la fabricación de un dispositivo electromecánico que tiene por lo menos un polímero previamente deformado. Las figuras 7B-F ilustran un procedimiento para la fabricación de un dispositivo electromecánico que tiene
múltiples capas de polímero.
Descripción detallada de las realizaciones preferentes La presente invención se describirá a continuación en detalle con referencia a unas pocas realizaciones preferentes de la misma, tal como se ilustra en los dibujos adjuntos. En la siguiente descripción, numerosos detalles específicos se exponen con el fin de proporcionar una comprensión exhaustiva de la presente invención. Será evidente, no obstante, para un experto en la técnica, que la presente invención puede practicarse sin parte o la totalidad de estos detalles específicos. En otros casos, las estructuras y/o etapas de procedimiento bien conocidas no se han descrito en detalle con el... [Seguir leyendo]
Reivindicaciones:
1. Un transductor para la conversión de energía eléctrica en energía mecánica, comprendiendo el transductor:
por lo menos dos electrodos; un polímero previamente deformado dispuesto de forma que de lugar a que una porción del polímero se flexe con respecto a una primera posición, con una primera área superficial, hasta una segunda posición, con una segunda área superficial, en respuesta a un cambio en el campo eléctrico; un miembro rígido acoplado al polímero, caracterizado porque el polímero comprende una superficie no uniforme, en el que la superficie no uniforme es texturada.
2. Transductor de acuerdo con la reivindicación 1, en el que el miembro rígido es adecuadamente rígido para mantener el nivel de deformación previa en el polímero.
3. Transductor de acuerdo con las reivindicaciones 1 o 2, en el que el miembro rígido está incluido en un armazón.
4. Transductor de acuerdo con cualquiera de las reivindicaciones anteriores, en el que la porción del polímero se acopla al miembro rígido en la primera posición.
5. Transductor de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el polímero se deforma previamente de manera isótropa.
6. Transductor de acuerdo con cualquiera de las reivindicaciones 1-4, en el que el polímero se deforma previamente de manera anisótropa, de tal modo que el polímero es relativamente más rígido en una dirección de alta deformación previa, y más adaptable en una dirección de baja deformación previa.
7. Transductor de acuerdo con cualquiera de las reivindicaciones anteriores 1-5, en el que el polímero se deforma previamente de manera elástica con un factor en el intervalo de aproximadamente 1, 5 veces a 50 veces el área original.
8. Transductor de acuerdo con cualquiera de las reivindicaciones anteriores 1-5, en el que la cantidad de deformación previa elástica para el polímero varía de menos 100 a más 600 %.
9. Transductor de acuerdo con la reivindicación 5, en el que el polímero es un elastómero acrílico, que se deforma previamente de manera elástica en por lo menos aproximadamente un 100 % y, preferentemente, se deforma previamente entre aproximadamente un 200 y un 400 %.
10. Transductor de acuerdo con la reivindicación 6, en el que el polímero es un polímero elastomérico acrílico, que se deforma previamente de manera elástica mediante el estiramiento en un 100 % en una dirección y en un 500 % en una dirección perpendicular.
11. Transductor de acuerdo con la reivindicación 5, en el que el polímero es un polímero elastomérico acrílico, que se deforma previamente de manera elástica mediante el estiramiento en u.
20. 400 % en ambas direcciones planas.
12. Transductor de acuerdo con la reivindicación 6, en el que el polímero previamente deformado de forma anisótropa se deforma previamente de manera elástica entre aproximadamente u.
40. 500 % en una dirección y entre aproximadamente u.
2. 200 % en una dirección perpendicular.
13. Transductor de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el miembro de soporte rígido, fija la porción del polímero en la primera posición, en el que la deformación previa elástica de la porción del polímero se lleva a cabo mediante el estiramiento desde un área superficial inicial hasta la primera área superficial para mejorar la respuesta mecánica del transductor cuando éste se flexa con respecto a la primera posición hacia la segunda posición, y en el que el miembro rígido suministra una fuerza a la porción estirada del polímero que evita que la porción estirada del polímero vuelva desde la primera área superficial hasta aproximadamente su área superficial inicial, y en el que la relación de la primera área superficial con respecto al área superficial inicial se encuentra en el intervalo de aproximadamente 1 a aproximadamente 50 en una primera dirección y en el intervalo desde menos de aproximadamente 1 en una dirección de área superficial ortogonal a la primera dirección.
14. El transductor de la reivindicación 13, en el que la relación de la primera área superficial con respecto al área superficial inicial en la dirección ortogonal se encuentra en el intervalo de aproximadamente - 1 a aproximadamente
1.
15. El transductor de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el transductor tiene una deformación lineal máxima de por lo menos aproximadamente un 50 %, en respuesta al cambio en el campo eléctrico.
16. El transductor de acuerdo con cualquiera de las reivindicaciones anteriores, que tiene una deformación lineal máxima de por lo menos aproximadamente un 100 %.
17. Transductor de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el polímero tiene una deformación lineal máxima en el intervalo de u.
40. 215 %.
18. Transductor de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el polímero tiene una
deformación de área en el intervalo de u.
7. 330 % y, preferentemente, de por lo menos aproximadamente un 5 100 %.
19. El transductor de acuerdo con cualquiera de las reivindicaciones anteriores, que tiene una eficiencia electromecánica mayor de aproximadamente un 80 por ciento.
20. El transductor de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el polímero tiene un módulo de elasticidad de, como máximo, aproximadamente 100 MPa.
21. El transductor de acuerdo con la reivindicación 1, en el que la superficie con textura comprende unos canales que tienen una anchura y una profundidad sustancialmente menores que el espesor del polímero.
22. El transductor de acuerdo con las reivindicaciones 1 o 21, en el que la superficie con textura comprende unas crestas que tienen una anchura y una altura sustancialmente menores que el espesor del polímero.
23. El transductor de acuerdo con cualquiera de las reivindicaciones anteriores 1.
2. 22, en el que la superficie no 15 uniforme comprende una superficie convertida en rugosa.
24. El transductor de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el polímero tiene una máxima presión de accionamiento de entre aproximadamente 0, 05 MPa y aproximadamente 10 MPa, preferentemente de entre aproximadamente 0, 3 MPa y aproximadamente 3 MPa.
25. El transductor de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el polímero tiene una
constante dieléctrica de entre aproximadamente 2 y aproximadamente 20 y, preferentemente, de entre aproximadamente 2, 5 y aproximadamente 12.
26. Procedimiento de fabricación de un transductor de acuerdo con cualquiera de las reivindicaciones anteriores, que comprende las etapas de:
a. deformar previamente de manera elástica una primera porción de un polímero para formar el polímero previamente deformado, y fijar una segunda porción del polímero previamente deformado a un miembro sólido y formar uno o más electrodos sobre el polímero previamente deformado.
Patentes similares o relacionadas:
Limitador de caudal y compresor de gas, del 22 de Abril de 2020, de Embraco Indústria de Compressores e Soluções em Refrigeração Ltda: Compresor de gas que comprende: - un cilindro ; - un pistón que puede moverse en un desplazamiento alternativo en el interior del cilindro […]
Motor de tipo electrodinámico lineal, refrigerador criogénico que comprende dicho motor y procedimiento que lleva a la práctica dicho motor, del 25 de Marzo de 2020, de L'AIR LIQUIDE, SOCIETE ANONYME POUR L'ETUDE ET L'EXPLOITATION DES PROCEDES GEORGES CLAUDE: Motor de tipo electrodinámico lineal, para comprimir un fluido circulante por un refrigerador criogénico , especialmente de ciclo de Stirling, comprendiendo el […]
Bomba portátil, del 25 de Marzo de 2020, de Walmsley Developments Pty Ltd: Bomba portátil que incluye: un dispositivo de un compresor de aire alternativo que incluye: una manivela que acciona una biela de conexión […]
Módulo de sensor de compresor, del 18 de Diciembre de 2019, de EMERSON CLIMATE TECHNOLOGIES, INC: Un sistema que comprende: un compresor que comprende un motor eléctrico configurado para conectarse a una fuente de alimentación ; un módulo de […]
Estátor, motor y compresor, del 9 de Octubre de 2019, de DAIKIN INDUSTRIES, LTD.: Un estátor que comprende: un núcleo de estátor que tiene una pluralidad de porciones de diente organizadas circunferencialmente con […]
Compresor estanco al aire y procedimiento para conectar y fijar un control electrónico a un compresor estanco al aire, del 4 de Septiembre de 2019, de Embraco Indústria de Compressores e Soluções em Refrigeração Ltda: Compresor estanco al aire que comprende: una valla , un conector del compresor estanco al aire , una carcasa exterior […]
Procedimiento y sistema para proteger un compresor lineal resonante, del 4 de Septiembre de 2019, de Embraco Indústria de Compressores e Soluções em Refrigeração Ltda: Procedimiento para proteger un compresor lineal resonante , comprendiendo el compresor lineal resonante : un pistón , un cilindro , un motor […]
Disposición de componentes de un compresor lineal, del 14 de Agosto de 2019, de Embraco Indústria de Compressores e Soluções em Refrigeração Ltda: Disposición de componentes de un compresor lineal , en la que dicho compresor lineal está compuesto por como mínimo un mecanismo de oscilación resonante […]