Unidad de accionamiento para un sistema de transporte y sistema de transporte con esta unidad de accionamiento.
Unidad de accionamiento (1) para el accionamiento de una plataforma de transporte (2) de un sistema de transporte,
comprendiendo la unidad de accionamiento (1):
* un alojamiento de accionamiento (4),
* un chasis (3), pudiendo el chasis (3) montarse de manera dirigible mediante el alojamiento de accionamiento (4) en la plataforma de transporte (2), en particular alrededor de un eje de dirección (5),
* al menos dos ruedas de accionamiento (6) que están montadas de manera giratoria en el chasis (3),
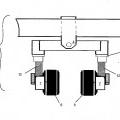
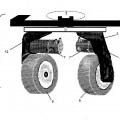
pudiendo solicitarse las al menos dos ruedas de accionamiento (6) con diferentes pares de giro de accionamiento, estando la unidad de accionamiento (1) configurada para la dirección de la plataforma de transporte (2) mediante la solicitación de las al menos dos ruedas de accionamiento (6) con pares de giro de accionamiento diferentes y/o pares de giro de accionamiento orientados en sentidos contrarios y/o sentidos de giro orientados de manera contraria, estando asignado en cada caso a las al menos dos ruedas de accionamiento (6) un dispositivo de amortiguación y/o suspensión (19, 20) propio,
caracterizada por que las ruedas de accionamiento (6) están configuradas como rodillos duros, ascendiendo el valor de dureza Shore A a más de 85°.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/065481.
Solicitante: Wft Fertigungstechnik Gmbh & Co. KG.
Nacionalidad solicitante: Alemania.
Dirección: Industriestrasse 25 92237 Sulzbach-Rosenberg ALEMANIA.
Inventor/es: WITTICH,FRANZ.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60K17/356 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 17/00 Disposiciones o montaje de las transmisiones en los vehículos (ejes que transmiten el par B60B 35/12; transmisiones y mecanismos de dirección combinados para dirigir las ruedas no orientables B62D 11/00; embragues en sí , p. ej. su construcción, F16D; engranajes en sí , p. ej. su construcción, F16H). › teniendo un motor de fluido o eléctrico para accionar una o más ruedas (disposición del motor en la rueda de tracción o adyacente a ella B60K 7/00).
- B60K7/00 B60K […] › Disposición del motor en la rueda motriz o adyacente a ella (mecanismos motores propulsando carretillas de patines A63C 17/12).
- B62D61/10 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 61/00 Vehículos a motor o remolques caracterizados por la disposición o el número de ruedas no previendo otro distinto, p. ej. cuatro ruedas dispuestas en rombo. › con más de cuatro ruedas.
PDF original: ES-2548029_T3.pdf
Fragmento de la descripción:
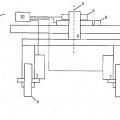
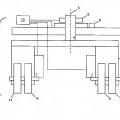
Unidad de accionamiento para un sistema de transporte y sistema de transporte con esta unidad de accionamiento La invención se refiere a una unidad de accionamiento para el accionamiento de una plataforma de transporte de un sistema de transporte con un alojamiento de accionamiento, con un chasis, estando el chasis montado de manera dirigible mediante el alojamiento de accionamiento en el sistema de transporte, en particular alrededor de un eje de dirección, y con al menos dos ruedas de accionamiento que están montadas de manera giratoria en el chasis, pudiendo solicitarse las al menos dos ruedas de accionamiento con pares de giro de accionamiento diferentes y/o pares de giro de accionamiento orientados en sentidos contrarios y/o sentidos de giro orientados de manera contraria. La invención se refiere también a un sistema de transporte que tiene al menos una unidad de accionamiento de este tipo.
En el transporte en particular de cargas pesadas se emplean muchas veces sistemas de transporte especiales que también están diseñados para transportar la carga por un trayecto limitado como, por ejemplo, de menos de 500 m. Por tanto, sistemas de transporte de este tipo no tienen que ser "aptos para autopistas" para ello sino que pueden estar diseñados de manera específica para estos caminos cortos.
Por ejemplo, el documento abierto a inspección pública DE 1 755 126 se refiere a un automóvil con un recipiente volcable que tiene cuatro pares de ruedas accionados, estando los dos pares de ruedas delanteros dirigidos por una traviesa giratoria.
El documento DE 42 046 42 C1 se refiere a una disposición de accionamiento para un automóvil con un eje de propulsión, pudiendo una rueda individual de un conjunto de ruedas gemelas accionarse permanentemente y la otra acoplarse en el accionamiento, estando la rueda individual acoplable unida permanentemente mediante un embrague viscoso con un eje de accionamiento. Mediante este orden de accionamiento se deben resolver problemas con respecto a la apariencia de un deslizamiento.
El documento DE 60116571 T2 se refiere a una disposición de ruedas gemelas para un vehículo pesado, teniendo la disposición de ruedas gemelas unos cubos de rueda primero y segundo que están dispuestos de manera adyacente entre sí, y un engranaje diferencial que une el primer cubo de rueda y el segundo cubo de rueda para permitir un giro relativo entre dichos cubos de rueda cuando el vehículo se mueve a lo largo de un trayecto curvado.
Conceptos de accionamiento de este tipo son conocidos, por ejemplo, también por el documento DE 199 48 486 A1
que muestra en la figura 2 un módulo para un vehículo con dos neumáticos de automóvil que se pueden activar con diferentes pares de giro de accionamiento, de modo que el módulo gira alrededor de un eje vertical común.
El documento US 4 572 311 describe un chasis para máquinas de construcción con neumáticos montados de manera giratoria en dos o varios ejes y que se pueden hacer rotar en sentidos contrarios. El chasis tiene al menos un cilindro de fluido que está asignado a al menos un neumático.
El documento US 2003/0127259 A1 describe una disposición de transporte para el movimiento por un terreno desnivelado. La disposición de transporte tiene un bastidor con varias patas de actuador, estando dispuesta en las patas de actuador una rueda para el movimiento hacia delante o hacia atrás de la disposición de transporte. La 45 disposición de transporte comprende un dispositivo de control y un dispositivo de pivotamiento, activando el dispositivo de control el dispositivo de pivotamiento para que desvíe la rueda y provoque un desplazamiento por curvas de la disposición de transporte. La disposición de transporte está configurada para realizar un movimiento tridimensional.
En el documento DE 10 2007 016 662 A1, que, al parecer, constituye el estado de la técnica más próximo, se describe un vehículo omnidireccional, un módulo de desplazamiento y un robot industrial móvil. El vehículo omnidireccional comprende un cuerpo de vehículo en el que está fijada al menos una rueda omnidireccional mediante una suspensión de rueda individual. La suspensión de rueda individual puede tener una amortiguación que amortigua al menos en parte la rueda omnidireccional en el funcionamiento.
La invención se basa en el objetivo de proponer una unidad de accionamiento para un sistema de transporte y un sistema de transporte correspondiente que constituya una alternativa adicional al transporte en particular de cargas pesadas.
Este objetivo se consigue mediante una unidad de accionamiento con las características de la reivindicación 1 y mediante un sistema de transporte con las características de la reivindicación 12. Formas de realización preferidas o ventajosas de la invención resultan de las reivindicaciones dependientes, de la siguiente descripción y de las figuras adjuntas.
En el marco de la invención se propone una unidad de accionamiento para una plataforma de transporte de un sistema de transporte. El sistema de transporte y/o la plataforma de transporte son adecuados y/o están
configurados para el transporte en particular para cargas pesadas, esto es, cargas con un peso superior a 1 t, preferiblemente superior a 5 t y, en particular, superior a 30 t. Especialmente, el sistema de transporte o la plataforma de transporte están diseñados para trayectos cortos, de modo que éste, por ejemplo, no está sujeto al código de circulación. Sin embargo, en otras formas de realización, el sistema de transporte también se puede utilizar para trayectos más grandes o también en el tráfico de carretera, por ejemplo, como vehículo industrial.
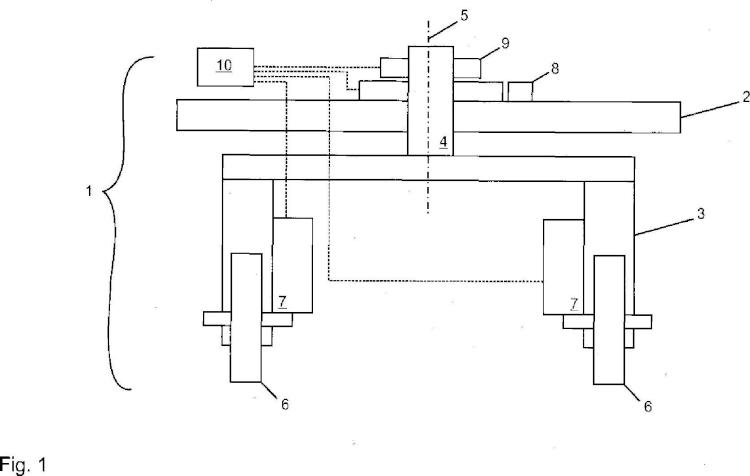
La unidad de accionamiento tiene un alojamiento de accionamiento y un chasis, estando el chasis montado mediante el alojamiento de accionamiento en la plataforma de transporte. De forma opcionalmente complementaria puede estar previsto además entre el alojamiento de accionamiento y el chasis y/o entre el alojamiento de accionamiento y la plataforma de transporte una suspensión y/o una amortiguación u otros grupos constructivos intermedios.
El alojamiento de accionamiento está configurado de modo que éste posibilita un pivotamiento del chasis con respecto a una región de dirección. De manera especialmente preferible, en el caso de la región de dirección se trata de un eje de dirección, siendo en formas de realización modificadas también posible que un o el eje de dirección se guíe o se vuelque durante el pivotamiento a lo largo de una línea para representar un movimiento de dirección más complejo, de modo que resulta realmente una región de dirección extendida con respecto a la que se hace pivotar el chasis. En particular, el alojamiento de accionamiento está configurado de manera pasiva y/o sin motor de dirección, de modo que éste no genera y/o no inicia pares de giro activos para el pivotamiento del chasis.
La unidad de accionamiento tiene al menos dos ruedas de accionamiento que están montadas de manera giratoria en el chasis y que apoyan la unidad de accionamiento o la plataforma de transporte o el sistema de transporte con respecto a una base como, por ejemplo, la carretera. Las al menos dos ruedas de accionamiento se pueden solicitar con diferentes pares de giro. Así, una rueda de accionamiento se puede solicitar con un primer par de giro de accionamiento y otra rueda de accionamiento se puede solicitar con otro par de accionamiento, diferenciándose los dos pares de accionamiento con respecto a la dirección y/o con respecto al importe. En particular, la relación de los pares de giro de accionamiento puede cambiar a lo largo del tiempo durante el funcionamiento.
De manera especialmente preferible, las al menos dos ruedas de accionamiento se pueden solicitar de manera selectiva con diferentes pares de giro de accionamiento, de modo que los pares de giro de accionamiento se pueden elegir libremente dentro de un intervalo de pares de giro de accionamiento. De manera alternativa o complementaria, las al menos dos ruedas de accionamiento se pueden solicitar con pares de giro de accionamiento orientados en sentidos contrarios, en particular con sentidos de giro orientados de manera contraria.
En el marco de la invención se propone que la unidad de accionamiento esté configurada, además de para el accionamiento, también para la dirección de la plataforma de transporte o del sistema de transporte mediante la solicitación de las al menos dos ruedas de accionamiento con pares de giro de accionamiento diferentes y/o pares de giro de accionamiento orientados en sentidos contrarios y/o sentidos de giro orientados de manera contraria.
Concretamente, para el accionamiento es adecuado diferentes solicitar las dos ruedas... [Seguir leyendo]
Reivindicaciones:
1. Unidad de accionamiento (1) para el accionamiento de una plataforma de transporte (2) de un sistema de transporte, comprendiendo la unidad de accionamiento (1) : 5
un alojamiento de accionamiento (4) ,
un chasis (3) , pudiendo el chasis (3) montarse de manera dirigible mediante el alojamiento de accionamiento (4) en la plataforma de transporte (2) , en particular alrededor de un eje de dirección (5) ,
al menos dos ruedas de accionamiento (6) que están montadas de manera giratoria en el chasis (3) ,
pudiendo solicitarse las al menos dos ruedas de accionamiento (6) con diferentes pares de giro de accionamiento, estando la unidad de accionamiento (1) configurada para la dirección de la plataforma de transporte (2) mediante la solicitación de las al menos dos ruedas de accionamiento (6) con pares de giro de accionamiento diferentes y/o pares de giro de accionamiento orientados en sentidos contrarios y/o sentidos de giro orientados de manera contraria, estando asignado en cada caso a las al menos dos ruedas de accionamiento (6) un dispositivo de amortiguación y/o suspensión (19, 20) propio, caracterizada por que las ruedas de accionamiento (6) están configuradas como rodillos duros, ascendiendo el valor de dureza Shore A a más de 85°.
2. Unidad de accionamiento (1) de acuerdo con la reivindicación 1, caracterizada por una regulación de nivel, estando la regulación de nivel configurada para cambiar entre sí el nivel de altura de las al menos dos ruedas de accionamiento (6) .
3. Unidad de accionamiento (1) de acuerdo con una de las reivindicaciones anteriores, caracterizada por que las al menos dos ruedas de accionamiento (6) se pueden solicitar independientemente entre sí con diferentes pares de giro de accionamiento y/o presentan tramos de accionamiento mecánico separados.
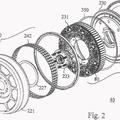
4. Unidad de accionamiento (1) de acuerdo con una de las reivindicaciones anteriores, caracterizada por que a cada una de las al menos dos ruedas de accionamiento (6) está asignado al menos un motor (7) para la solicitación con el par de giro de accionamiento, estando los motores o accionamientos (7) configurados como motores de accionamiento directo y/o motores de cubo y/o accionamientos cicloidales.
5. Unidad de accionamiento de acuerdo con la reivindicación 4, caracterizada por que el accionamiento cicloidal tiene un disco de levas y un dispositivo de anillo de perno que rueda en el mismo, estando el anillo de perno 35 configurado como salida de fuerza y/o acoplado de manera fija frente a un giro con la rueda de accionamiento (6) .
6. Unidad de accionamiento (1) de acuerdo con una de las reivindicaciones anteriores, caracterizada por una o varias ruedas de apoyo (11) , estando la o las ruedas de apoyo (11) dispuesta o dispuestas de forma sincrónica con las ruedas de accionamiento (6) .
7. Unidad de accionamiento (1) de acuerdo con una de las reivindicaciones anteriores, caracterizada por que el eje de dirección (5) y las al menos dos ruedas de accionamiento (6) están dispuestas y/o configuradas de modo que se genera un pivotamiento del chasis (3) con respecto al eje de dirección (5) mediante un giro en sentido contrario de las al menos dos ruedas de accionamiento (6) .
8. Unidad de accionamiento (1) de acuerdo con una de las reivindicaciones anteriores, caracterizada por un dispositivo de bloqueo (8) que está configurado para bloquear el pivotamiento del chasis (3) con respecto al eje de dirección (5) .
9. Unidad de accionamiento (1) de acuerdo con una de las reivindicaciones anteriores, caracterizada por un transmisor de ángulo de giro (9) que está configurado para captar el ángulo de pivotamiento del chasis (3) y/o de la unidad de accionamiento con respecto al eje de dirección (5) .
10. Unidad de accionamiento (1) de acuerdo con una de las reivindicaciones anteriores, caracterizada por un 55 dispositivo de control (10) que está configurado mediante programas y/o mediante circuitos a fin de activar la unidad de accionamiento (1) para un proceso de accionamiento y para un proceso de dirección de la plataforma de transporte (2) .
11. Sistema de transporte con al menos una plataforma de transporte (2) , caracterizado por que la plataforma de 60 transporte (2) comprende al menos una de las unidades de accionamiento (1) de las reivindicaciones anteriores.
12. Sistema de transporte de acuerdo con la reivindicación 11, caracterizado por que la plataforma de transporte está configurada como un vehículo de transporte de cargas pesadas, en particular como un vehículo de plataforma baja y/o como un bastidor de vehículo de plataforma baja.
13. Sistema de transporte de acuerdo con las reivindicaciones 11 o 12, caracterizado por que la plataforma de transporte (2) tiene unidades de rueda de apoyo (14, 15) pasivas.
14. Sistema de transporte de acuerdo con una de las reivindicaciones anteriores, caracterizado por que la
plataforma de transporte (2) presenta varias unidades de accionamiento (1) de acuerdo con una de las reivindicaciones anteriores que se activan conjuntamente mediante un dispositivo de control (10) , estando el dispositivo de control (10) configurado mediante programas y/o mediante circuitos a fin activar las varias unidades de accionamiento (1) para un proceso de accionamiento y para un proceso de dirección de la plataforma de transporte.
15. Sistema de transporte de acuerdo con una de las reivindicaciones anteriores, caracterizado por que las plataformas de transporte (2) presentan interfaces mecánicas (16) para el acoplamiento mutuo a fin de formar conjuntamente una plataforma grande.
16. Sistema de transporte de acuerdo con una de las reivindicaciones anteriores, caracterizado por varias plataformas de transporte (2) , en cada caso con al menos una de las unidades de accionamiento (1) , pudiendo las plataformas de transporte (2) acoplarse de manera mecánica y/o virtual entre sí de, modo que forman una plataforma grande, y estando uno de los dispositivos de control (10) configurado como dispositivo de control maestro a fin de activar las unidades de accionamiento (1) de las varias plataformas de transporte (2) para un proceso de accionamiento y para un proceso de dirección de la plataforma grande.
Patentes similares o relacionadas:
Sistema modular de tracción eléctrica, del 7 de Julio de 2020, de FPT Industrial S.p.A: Sistema modular de tracción eléctrica. Conjunto de puente para un vehículo pesado que comprende una pieza transversal que conecta rígidamente entre sí al menos un […]
Accionamiento eléctrico, del 29 de Enero de 2020, de GKN AUTOMOTIVE LTD: Accionamiento eléctrico para accionar un eje de accionamiento de un vehículo automóvil, que comprende: una disposición de carcasa ; […]
Tren de potencia para un vehículo, del 8 de Enero de 2020, de Alpraaz AB: Un tren de potencia para suministrar par a una rueda motriz y una rueda motriz adicional de un vehículo de carretera, en donde el tren de […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
SISTEMA DE PROPULSION HIDRÁULICO PARA VEHÍCULOS DE DOBLE TRACCIÓN, del 10 de Octubre de 2019, de SOTAVENTO CAFE SL: El objeto de la invención es proporcionar un ahorro de combustible, que supone una gran reducción de gases contaminantes para ejercer una fuerza que puede desplazar […]
SISTEMA DE PROPULSION HIDRAULICO PARA VEHICULOS DE DOBLE TRACCION, del 4 de Octubre de 2018, de GUADIANA HISPANO PORTUGESA, SL: 1. Sistema de propulsión hidráulico para vehículos de doble tracción, que constituyéndose a partir de un motor propulsor principal de combustión, eléctrico u otros, […]
 Motor eléctrico para un vehículo eléctrico, del 11 de Julio de 2018, de Protean Electric Limited: Un motor eléctrico para hacer girar una rueda de un vehículo , el motor eléctrico tiene un rotor , un estator y enrollados de bobina, un primer sensor […]
Motor eléctrico para un vehículo eléctrico, del 11 de Julio de 2018, de Protean Electric Limited: Un motor eléctrico para hacer girar una rueda de un vehículo , el motor eléctrico tiene un rotor , un estator y enrollados de bobina, un primer sensor […]
SISTEMA DE PROPULSIÓN HIDRÁULICO PARA VEHÍCULOS DE DOBLE TRACCIÓN, del 27 de Junio de 2018, de GUADIANA HISPANO PORTUGESA, SL: El sistema de propulsión hidráulico para vehículos de doble tracción, se basa en que entre el tradicional motor propulsor principal alimentado […]