ROBOT PARA LLEVAR A CABO OPERACIONES INDUSTRIALES MEDIANTE UN RAYO LASER TRANSMITIDO POR UNA FIBRA OPTICA DISPUESTA EN EL INTERIOR DEL ROBOT.
Robot para llevar a cabo operaciones industriales mediante un rayo láser que comprende una estructura que incluye por lo menos un brazo articulado (1),
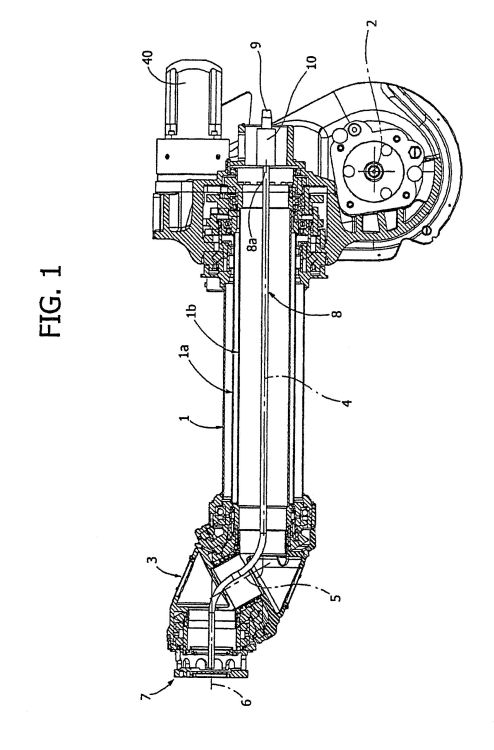
provisto de una forma tubular y que termina con una muñeca del robot (3), estando provista esta última de una forma sustancialmente tubular hueca, en el que dicha muñeca (3) une el brazo articulado (1) anteriormente mencionado con un soporte (7) para el montaje de un cabezal de enfoque del láser (15) sobre el mismo, de tal modo que dicho soporte (7) pueda girar alrededor de uno o más ejes (4-6) con respecto al extremo terminal del brazo articulado (1) del robot, comprendiendo dicho robot asimismo uno o más motores eléctricos (40) para controlar los giros de dicha muñeca del robot (3) alrededor de dichos ejes (4-6), y en el que dicho robot está provisto asimismo de un cabezal de enfoque del láser (15) montado en dicho soporte (7) y con una fibra óptica (8) para conducir el rayo láser desde un generador de láser hasta el cabezal de enfoque (15) anteriormente mencionado, en el que la fibra óptica que suministra el rayo láser de potencia al cabezal de enfoque del láser presenta por lo menos una parte (8) dispuesta en el interior de la estructura del robot y en particular en el interior del brazo articulado (1) y en el interior de la muñeca hueca (3) del robot, caracterizado porque dicha parte de fibra óptica (8) está provista de una junta giratoria (10) en un extremo (8a) opuesto a la muñeca hueca (3), mientras en la proximidad de la muñeca hueca (3) está conectada a un conectador (11) de un dispositivo de reflexión de espejo (12) que envía el rayo láser de potencia en una dirección radial hacia un elemento adicional de una fibra óptica (14) que transporta el rayo láser de potencia hasta el cabezal de enfoque del láser (15).
Tipo: Resumen de patente/invención.
Solicitante: COMAU S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA RIVALTA 30,10095 GRUGLIASCO (TORINO).
Inventor/es: DEPLANO, STEFANO.
Fecha de Publicación: .
Fecha Solicitud PCT: 2 de Marzo de 2005.
Fecha Concesión Europea: 23 de Abril de 2008.
Clasificación PCT:
- B23K26/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › B23K 26/00 Trabajo por rayos láser, p. ej. soldadura, corte o taladrado. › Dispositivos que tiene un movimiento relativo entre el haz de rayos y la pieza.
- B23K26/10 B23K 26/00 […] › con un soporte fijo.
- B25J19/00 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Aparato y sistema de brazo articulado, del 8 de Abril de 2020, de VANRX Pharmasystems Inc: Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato: […]
Sistema de traslación, del 8 de Abril de 2020, de SW Automation GmbH: Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
Sistema de carga eléctrica para un robot, del 18 de Marzo de 2020, de Locus Robotics Corp: Un sistema de carga eléctrica, que comprende: un conjunto de cargador eléctrico, incluyendo: una base del cargador a acoplarse a una fuente de energía eléctrica; […]