PROCEDIMIENTO Y DISPOSITIVO PARA CONTROLAR UNA PLURALIDAD DE MANIPULADORES.
Procedimiento para controlar una pluralidad de manipuladores, con cierto número de unidades de mando que están asignadas a los manipuladores de modo que cada unidad de mando controla como mínimo un manipulador, procedimiento en el que un aparato de control accede a varias unidades de mando para el control de los manipuladores;
procedimiento en el que el aparato de control genera señales de mando relevantes para el movimiento directamente adecuadas para un control del movimiento de los manipuladores en cuestión; procedimiento en el que mediante el aparato de control se presenta una interfaz de usuario de una unidad de mando de un manipulador seleccionado, caracterizado porque los datos de contenido de imagen y las señales de mando generadas por el aparato de control se transmiten por canales diferentes, estando el funcionamiento y el destino de los canales controlados por un dispositivo de vigilancia
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04006517.
Solicitante: KUKA ROBOTER GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Blücherstrasse 144 86165 Augsburg ALEMANIA.
Inventor/es: Kazi,Arif,Dr, Hietmann,Gerhard, Bunsendal,Jens, Spiess,Carsten.
Fecha de Publicación: .
Fecha Solicitud PCT: 18 de Marzo de 2004.
Clasificación Internacional de Patentes:
- B25J13/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › Puestos de control, p. ej. pupitres, cuadros de mando.
- B25J9/16T1
- G05B19/418N
Clasificación PCT:
- B25J9/16 B25J […] › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G05B19/418 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Control total de una fábrica, es decir, control centralizado de varias máquinas, p. ej. control numérico directo o distribuido (DNC), sistemas de fabricación flexibles (FMS), sistemas de fabricación integrados (IMS), fabricación integrada por computador (CIM).
Clasificación antigua:
- B25J9/16 B25J 9/00 […] › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G05B19/418 G05B 19/00 […] › Control total de una fábrica, es decir, control centralizado de varias máquinas, p. ej. control numérico directo o distribuido (DNC), sistemas de fabricación flexibles (FMS), sistemas de fabricación integrados (IMS), fabricación integrada por computador (CIM).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2364652_T3.pdf
Fragmento de la descripción:
La invención se refiere a un procedimiento y un dispositivo para controlar una pluralidad de manipuladores, con cierto número de unidades de mando que están asignadas a los manipuladores de modo que cada unidad de mando controla como mínimo un manipulador.
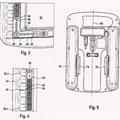
Para el desplazamiento manual de manipuladores como los robots industriales, por ejemplo en el marco de procesos de aprendizaje de un robot (Teaching), o durante la modificación de programas de control asistidos por software en las unidades de mando asignadas a los manipuladores, se utilizan hoy día por regla general aparatos de control portátiles y por lo tanto de empleo flexible. Éstos aparatos presentan por lo general elementos de mando y de entrada, como palancas de mando o teclas, y además en caso dado elementos de visualización, y están conectados a una unidad de mando de robots por medio de cables o una comunicación inalámbrica.
Por cada unidad de mando se requiere un aparato de control de este tipo, de modo que por regla general se emplea un aparato de control propio para cada manipulador, ya que cada manipulador tiene también un mando propio. Como alternativa, se conoce el método de prever un mando común para varios manipuladores. En este caso, el mando tiene conectado sólo un aparato de control común.
En la alternativa mencionada en primer lugar ha resultado desventajoso, en el caso de la utilización de una conexión por cable entre el aparato de control y la unidad de mando, el hecho de que, debido a la pluralidad de aparatos de control empleados, se produce un cruzamiento y entrecruzamiento de los cables y, por lo tanto, la asignación segura de aparatos de control y manipuladores no es posible sin más para los operadores, especialmente si los manipuladores, como en la industria del automóvil, están muy cerca unos de otros.
Por motivos de seguridad, los aparatos de control de los manipuladores como los robots industriales tienen normalmente un interruptor de autorización, que ha de mantenerse pulsado durante el funcionamiento de prueba para poder desplazar el robot en cuestión. En las aplicaciones en las que varios manipuladores cooperan entre sí, ha resultado desventajoso el hecho de que, en este caso, deben pulsarse simultáneamente los interruptores de autorización de varios aparatos de control, de modo que un control tal de robots que cooperan sólo es posible con varios operadores.
Los sistemas de control ya conocidos en los que varios robots están conectados a un mando común evitan las desventajas arriba mencionadas. Sin embargo, el número de robots manejables está limitado aquí por las capacidades de las distintas unidades de mando.
Si el número de manipuladores es mayor que los que puedan conectarse a un mando, ya no será posible desplazar de forma coordinada todos los manipuladores, lo que limita considerablemente la flexibilidad de tales sistemas en el trabajo.
Por el documento WO 01/67190 A2, se conocen un procedimiento de control y una instalación de producción industrial. En este documento, se propone conectar un mando de instalación y unos componentes de aplicación por medio de una red de datos WEB, en la que los componentes de aplicación están integrados mediante un servidor WEB propio y una homepage propia.
El documento DE 101 10 776 A1, se refiere a un procedimiento para la asignación de un equipo de control móvil a una máquina. Con este fin se logra, en un proceso de asignación o registro mediante localización inalámbrica, alcance de emisión o sensibilidad de recepción, una asignación inequívoca del equipo de control a una máquina determinada.
Por el documento DE 100 58 524 A1, se conoce el método de transmitir en el mismo ciclo de transmisión datos críticos en cuanto al tiempo real y no críticos en cuanto al tiempo real, estando previstas en cada caso zonas propias para los datos críticos y los datos no críticos en cuanto al tiempo real.
La invención tiene el objetivo, evitando las desventajas del estado actual de la técnica arriba mencionadas, de crear un procedimiento y un sistema para controlar una pluralidad de manipuladores, que permitan manejar un número cualquiera de manipuladores, debiendo este número ser independiente de las capacidades de las distintas unidades de mando y habiendo de ser posible al mismo tiempo desplazar varios manipuladores de forma coordinada y también influir selectivamente en manipuladores individuales.
El objetivo se logra mediante un procedimiento según la reivindicación 1 o un dispositivo según la reivindicación 15.
La invención garantiza un control o manejo flexible de los manipuladores. En el curso del procedimiento según la invención, o en el marco del dispositivo según la invención, un operador tiene la posibilidad de, en el caso de varias unidades de mando, influir mediante un aparato de control directamente en los movimientos de uno o varios manipuladores, por ejemplo durante el funcionamiento de prueba. De acuerdo con el procedimiento según la invención, está previsto que en el aparato de control se generen señales de mando (señales relevantes para el movimiento) directamente adecuadas para un control del movimiento de los manipuladores en cuestión.
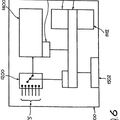
De acuerdo con un perfeccionamiento del dispositivo según la invención, las unidades de mando están subdivididas en cada caso en zonas configuradas para la ejecución de un sistema operativo con capacidades de tiempo real y un sistema operativo sin capacidades de tiempo real, estando preferentemente las zonas con capacidades de tiempo real de las unidades de mando configuradas para el procesamiento de señales de mando (señales de mando relevantes para el movimiento) directamente adecuadas para un control del movimiento de los manipuladores en cuestión. En este contexto, un perfeccionamiento preferido del procedimiento según la invención prevé que las señales de mando relevantes para el movimiento se transmitan mediante un primer dispositivo de transmisión a una zona de la unidad de mando asignada que está configurada para un procesamiento en tiempo real de señales de mando relevantes para el movimiento.
Además, un perfeccionamiento del dispositivo según la invención prevé que las zonas sin capacidades de tiempo real de las unidades de mando estén conectadas mediante un segundo dispositivo de transmisión. Para que sea posible controlar varios manipuladores con sólo un aparato de control común, está previsto en un perfeccionamiento que una unidad de mando, a la que puede conectarse el aparato de control por medios físicos o lógicos, presente en su zona sin capacidades de tiempo real un dispositivo terminal para la presentación de interfaces de usuario de distintas unidades de mando. En un perfeccionamiento preferido, esta unidad de mando tiene además un dispositivo de detección para detectar la unidad de mando que controla los manipuladores seleccionados. De acuerdo con una configuración preferida, el dispositivo según la invención comprende además un dispositivo de control de recorrido sobre el que puede actuarse a través del dispositivo de detección, de manera que las señales de mando relevantes para el movimiento pueden transmitirse mediante el primer dispositivo de transmisión a la unidad de mando asignada a los manipuladores seleccionados. De este modo, es posible transmitir de forma encauzada a determinadas unidades de mando las señales de mando disparadas por el aparato de control común. Paralelamente a una transmisión a la unidad de mando asignada, según la invención se realiza en la unidad de mando que presenta el dispositivo de detección preferentemente una transmisión de las señales de mando al dispositivo terminal.
En el curso de un perfeccionamiento del procedimiento según la invención, otras señales de mando, generadas por el aparato de control y no directamente relevantes para el movimiento, se transmiten exclusivamente al dispositivo terminal. En el marco del dispositivo según la invención, puede estar prevista además la posibilidad de comunicar mediante el segundo dispositivo de transmisión todas las señales de mando entre el dispositivo terminal y una zona de la unidad de mando asignada, configurada para un procesamiento de datos en tiempo no real, como una interfaz de usuario.
Para permitir a un operador un control directo sobre el manipulador que se desea manejar, está previsto además, de acuerdo con el procedimiento según la invención, que el aparato de control muestre la interfaz de usuario de la unidad de mando del manipulador seleccionado, mostrándose ésta preferentemente de forma... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para controlar una pluralidad de manipuladores, con cierto número de unidades de mando que están asignadas a los manipuladores de modo que cada unidad de mando controla como mínimo un manipulador, procedimiento en el que un aparato de control accede a varias unidades de mando para el control de los manipuladores; procedimiento en el que el aparato de control genera señales de mando relevantes para el movimiento directamente adecuadas para un control del movimiento de los manipuladores en cuestión; procedimiento en el que mediante el aparato de control se presenta una interfaz de usuario de una unidad de mando de un manipulador seleccionado, caracterizado porque los datos de contenido de imagen y las señales de mando generadas por el aparato de control se transmiten por canales diferentes, estando el funcionamiento y el destino de los canales controlados por un dispositivo de vigilancia.
2. Procedimiento según la reivindicación 1, caracterizado porque las señales de mando relevantes para el movimiento se transmiten mediante un primer dispositivo de transmisión a una zona de la unidad de mando asignada que está configurada para un procesamiento en tiempo real de señales de mando relevantes para el movimiento.
3. Procedimiento según una de las reivindicaciones 1 y 2, caracterizado porque el aparato de control genera otras señales de mando que no son directamente relevantes para el movimiento.
4. Procedimiento según la reivindicación 3, caracterizado porque las otras señales se transmiten exclusivamente a un dispositivo terminal existente en una zona sin capacidades de tiempo real de una unidad de mando y configurado para la presentación de interfaces de usuario de distintas unidades de mando.
5. Procedimiento según una de las reivindicaciones 3 a 4, caracterizado porque las otras señales de mando se transmiten mediante un segundo dispositivo de transmisión a una zona de la unidad de mando asignada que está configurada para un procesamiento de datos en tiempo no real.
6. Procedimiento según la reivindicación 1, caracterizado porque la presentación se realiza gráficamente y porque, para la identificación de los manipuladores seleccionados, se visualiza en el aparato de control una designación de los manipuladores o, para la identificación de los manipuladores seleccionados, se visualiza en el aparato de control una marca ópticamente activa existente en el manipulador en cuestión.
7. Procedimiento según la reivindicación 6, caracterizado porque, para la identificación de los manipuladores seleccionados, se activa un emisor de señales acústicas y/u ópticas existente en el manipulador en cuestión.
8. Procedimiento según una de las reivindicaciones 6 y 7, caracterizado porque los contenidos de imagen de la unidad de mando asignada a los manipuladores seleccionados se transmiten digitalmente al aparato de control.
9. Procedimiento según la reivindicación 8, caracterizado porque los datos de los contenidos de imagen se comprimen antes de la transmisión.
10. Procedimiento según la reivindicación 8 ó 9, caracterizado porque los elementos de imagen estándar son transmitidos como instrucciones de mando y visualizados de forma autónoma por el aparato de control.
11. Procedimiento según una de las reivindicaciones 6 a 10, caracterizado porque los contenidos de imagen se transmiten en forma de datos de píxeles.
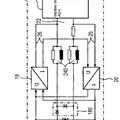
12. Procedimiento según una de las reivindicaciones 1 a 11, caracterizado porque la transmisión de señales relevantes para el movimiento a través del primer dispositivo de transmisión está controlada por un primer dispositivo de vigilancia, generando el dispositivo de vigilancia una señal de mando relevante para el movimiento en caso de cortarse la transmisión.
13. Procedimiento según una de las reivindicaciones 1 a 12, caracterizado porque el manipulador enlazado al aparato de control por medio de la unidad de mando seleccionada se indica mediante un emisor de señales ópticas y/o acústicas.
14. Procedimiento según la reivindicación 13, caracterizado porque el emisor de señales es vigilado por un dispositivo de vigilancia en lo que se refiere a su capacidad funcional.
15. Dispositivo para controlar una pluralidad de manipuladores, con cierto número de unidades de mando, que están asignadas a los manipuladores de modo que cada unidad de mando controla como mínimo un manipulador, y con un aparato de control común (6), que puede conectarse a como mínimo una unidad de mando concreta para el control de los manipuladores (1.1, 1.2, 1.3, 1.4), dispositivo en el que el aparato de control (6) está configurado para generar señales de mando relevantes para el movimiento directamente adecuadas para un control del movimiento de los manipuladores en cuestión y presenta un dispositivo de visualización (6.1) para la presentación de interfaces de usuario (BOF) de distintas unidades de mando (2.12.4), caracterizado porque entre las unidades de mando (2.1-2.4) y el aparato de control (6) pueden
transmitirse señales de visualización y señales de mando por canales de datos diferentes y caracterizado por un dispositivo de vigilancia (3'') que está configurado para vigilar el funcionamiento y el destino de los canales de datos.
16. Dispositivo según la reivindicación 15, caracterizado porque las unidades de mando (2.1, 2.2, 2.3, 2.4) están subdivididas en cada caso en zonas configuradas para la ejecución de un sistema operativo con capacidades de tiempo real y un sistema operativo sin capacidades de tiempo real (RT o NRT).
17. Dispositivo según la reivindicación 16, caracterizado porque las zonas con capacidades de tiempo real (RT) de las unidades de mando (2.1-2.4) están configuradas para el procesamiento de señales de mando relevantes para el movimiento directamente adecuadas para un control del movimiento de los manipuladores (1.1-1.4) en cuestión.
18. Dispositivo según la reivindicación 17, caracterizado porque las zonas con capacidades de tiempo real (RT) de las unidades de mando (2.1-2.4) están conectadas mediante un primer dispositivo de transmisión (3) y las zonas sin capacidades de tiempo real (NRT) de las unidades de mando (2.1-2.4) están conectadas mediante un segundo dispositivo de transmisión (3').
19. Dispositivo según una de las reivindicaciones 15 a 18, caracterizado porque como mínimo una unidad de mando (2.3) presenta, en su zona sin capacidades de tiempo real (NRT), un dispositivo terminal (2.3g) para la visualización de interfaces de usuario (BOF) de distintas unidades de mando (2.1, 2.2, 2.3, 2.4).
20. Dispositivo según una de las reivindicaciones 15 a 19, caracterizado porque como mínimo una unidad de mando (2.3) presenta un dispositivo de detección (2.3e), para la detección de una unidad de mando (2.1-2.4) que controla los manipuladores (1.1-1.4) seleccionados.
21. Dispositivo según la reivindicación 20, caracterizado porque la unidad de mando (2.3) que presenta el dispositivo de detección (2.3e) presenta un dispositivo de control de recorrido (2.3c) sobre el que puede actuarse a través del dispositivo de detección (2.3e), de modo que las señales de mando relevantes para el movimiento pueden transmitirse mediante el primer dispositivo de transmisión (3) a la unidad de mando (2.12.4) asignada a los manipuladores (1.1-1.4) seleccionados.
22. Dispositivo según las reivindicaciones 19 y 21, caracterizado porque las señales de mando relevantes para el movimiento pueden transmitirse al dispositivo terminal (2.3g) paralelamente a una transmisión a la unidad de mando (2.1-2.4) asignada.
23. Dispositivo según la reivindicación 19, caracterizado porque otras señales de mando no directamente relevantes para el movimiento generadas por el aparato de control (6) pueden transmitirse exclusivamente al dispositivo terminal (2.3g).
24. Dispositivo según las reivindicaciones 18 y 19, caracterizado porque mediante el segundo dispositivo de transmisión (3') pueden comunicarse todas las señales de mando entre el dispositivo terminal (2.3g) y una interfaz de usuario (BOF) de la unidad de mando (2.1-2.4) asignada.
25. Dispositivo según la reivindicación 15, caracterizado porque el aparato de control (6) está configurado para la visualización de interfaces de usuario (BOF) de distintas unidades de mando (2.1-2.4).
26. Dispositivo según la reivindicación 15, caracterizado por una correspondencia inequívoca entre la interfaz de usuario (BOF) visualizada y un manipulador (1.1-1.4) seleccionado.
27. Dispositivo según la reivindicación 26, caracterizado porque la interfaz de usuario (BOF) visualizada presenta marcas ópticamente activas (M1, M2, M3) en esencia idénticas a las del manipulador (1.1-1.4).
28. Dispositivo según una de las reivindicaciones 15 a 27, caracterizado por un dispositivo de transmisión de seguridad (5) que conecta entre sí las unidades de mando (2.1-2.4) de todos los manipuladores (1.1-1.4).
29. Dispositivo según una de las reivindicaciones 15 a 28, caracterizado porque las señales de mando generadas por el aparato de control (6) sólo pueden transmitirse a la unidad de mando (2.1-2.4) asignada después de una confirmación.
Patentes similares o relacionadas:
 Procedimiento para manejar un robot industrial, del 28 de Septiembre de 2016, de Reis Group Holding GmbH & Co. KG: Procedimiento para manejar un robot industrial mediante un dispositivo de mando que comprende la etapa de procedimiento de tocar un elemento […]
Procedimiento para manejar un robot industrial, del 28 de Septiembre de 2016, de Reis Group Holding GmbH & Co. KG: Procedimiento para manejar un robot industrial mediante un dispositivo de mando que comprende la etapa de procedimiento de tocar un elemento […]
SISTEMA PARA PROGRAMAR ROBOTS O APARATOS AUTOMATICOS SIMILARES, QUE COMPRENDE UN TERMINAL DE PROGRAMACION PORTATIL., del 16 de Mayo de 2007, de COMAU S.P.A.: Sistema de programación para un robot, o un aparato automático similar, que contiene una herramienta , comprendiendo el sistema una unidad de control […]
 TERMINAL PORTATIL PARA CONTROLAR, PROGRAMAR Y/O ENSEÑAR ROBOTS O APARATOS AUTOMATICOS SIMILARES, del 28 de Octubre de 2009, de COMAU S.P.A.: Terminal de indicación y/o de programa, de control portátil previsto para su conexión a una unidad de control de movimientos según los ejes […]
TERMINAL PORTATIL PARA CONTROLAR, PROGRAMAR Y/O ENSEÑAR ROBOTS O APARATOS AUTOMATICOS SIMILARES, del 28 de Octubre de 2009, de COMAU S.P.A.: Terminal de indicación y/o de programa, de control portátil previsto para su conexión a una unidad de control de movimientos según los ejes […]
PROCEDIMIENTO, NODO Y RED PARA EL ENVÍO CÍCLICO DE TELEGRAMAS DE ETHERNET, del 31 de Marzo de 2011, de BECKHOFF AUTOMATION GMBH: Procedimiento para el envío de datos en forma de telegramas de Ethernet a través de un nodo en un recorrido de transmisión de Ethernet, con las siguientes etapas del […]
PROCEDIMIENTO Y SISTEMA DE CONTROL DE PROCESOS PARA OPERAR UNA INSTALACIÓN TÉCNICA, del 16 de Febrero de 2011, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para operar una instalación técnica con cierta cantidad de equipos de campo (FD) para la supervisión y el control de componentes de la instalación […]
 DISPOSITIVO DE CAMPO PARA UN SISTEMA DE BUS DE CAMPO, del 21 de Octubre de 2010, de ABB SERVICE S.R.L: Dispositivo de campo adecuado para la instalación en un ambiente industrial comprendiendo medios para la conexión a una red de bus de campo y medios de […]
DISPOSITIVO DE CAMPO PARA UN SISTEMA DE BUS DE CAMPO, del 21 de Octubre de 2010, de ABB SERVICE S.R.L: Dispositivo de campo adecuado para la instalación en un ambiente industrial comprendiendo medios para la conexión a una red de bus de campo y medios de […]
 RED INTERFAZ SENSOR-ACTUADOR PARA GRANDES DISTANCIAS, del 14 de Junio de 2010, de SIEMENS AKTIENGESELLSCHAFT: Red interfaz sensor-actuador con una pluralidad de participantes en la comunicación , los cuales se encuentran conformados como maestro o como sensores […]
RED INTERFAZ SENSOR-ACTUADOR PARA GRANDES DISTANCIAS, del 14 de Junio de 2010, de SIEMENS AKTIENGESELLSCHAFT: Red interfaz sensor-actuador con una pluralidad de participantes en la comunicación , los cuales se encuentran conformados como maestro o como sensores […]
 PROCEDIMIENTO DE INTERCAMBIO DE DATOS ENTRE SISTEMAS DE MANDO DE MAQUINAS, Y EN PARTICULAR DE ROBOTS, del 4 de Mayo de 2010, de KUKA ROBOTER GMBH: Procedimiento de intercambio de datos entre sistemas de mando de máquinas, y en particular de robots, donde un primer sistema de mando genera una instrucción a transmitir […]
PROCEDIMIENTO DE INTERCAMBIO DE DATOS ENTRE SISTEMAS DE MANDO DE MAQUINAS, Y EN PARTICULAR DE ROBOTS, del 4 de Mayo de 2010, de KUKA ROBOTER GMBH: Procedimiento de intercambio de datos entre sistemas de mando de máquinas, y en particular de robots, donde un primer sistema de mando genera una instrucción a transmitir […]