Sistema y procedimiento de conducción automática y de aviso de datos o señales de tráfico para trenes y vehículos rodados.
Sistema y procedimiento de conducción automática y de aviso de datos o señales de tráfico para trenes y vehículos rodados,
que consiste en colocar en la zona delantera, trasera o inferior del vehículo al menos un sistema detector y captador de señales utilizando unos elementos, franjas, bandas reflectantes codificadas y dispuestas en las calzadas o las traviesas, las señales captadas se aplican directamente a avisadores luminosos o sonoros, a un microprocesador o al procesador principal del tren o vehículo, estos últimos decodifican y comparan las señales obtenidas con la velocidad de dicho vehículo, calculando y proporcionando señales de control y de aviso acústicas y visuales, las de control se aplican a un actuador que acciona la válvula de flujo de combustible que controla los gases o potencia del motor o a los motores eléctricos accionadores de las ruedas, adicionalmente el procesador o microprocesador controla la actuación de los frenos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201400231.
Solicitante: MUÑOZ SAIZ,MANUEL.
Nacionalidad solicitante: España.
Inventor/es: MUÑOZ SAIZ,MANUEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Fragmento de la descripción:
SISTEMA Y PROCEDIMIENTO DE CONDUCCIÓN AUTOMÁTICA Y DE AVISO DE DATOS O SEÑALES DE TRÁFICO PARA TRENES Y VEHÍCULOS RODADOS
CAMPO DE LA INVENCION.- En sistemas de aviso de señales de circulación y de conducción automática de trenes convencionales, de Ievitación magnética, vehículos en general e incluso para vehículos a escala o de juguetería.
ESTADO DE LA TECNICA.
Actualmente cuando se desea reducir la velocidad de los trenes se usan sistemas apoyados en sistemas externos como el ASFA o el ERTMS, que son mas complejos y menos seguros, y estar mas expuestos a averías, este último solo se utiliza en alta velocidad. La señalización es cara y por ello es escasa o insuficiente no aporta con antelación avisos de velocidades o zonas peligrosas para todo tipo de trenes ni es válida para la conducción automática. La presente invención soluciona dichos inconvenientes y puede considerarse continuación o complementar la patente P201101025.
OBJETIVO DE LA INVENCION.
Utilizar distintas líneas transversales codificadas sobre las traviesas o la calzada, a modo de código de barras, las cuales son compatibles con las señales visuales actuales y pueden sustituirlas o eliminarlas. Dichas señales son captadas por distintos medios siendo interpretadas posteriormente por un microprocesador en el propio tren o vehículo, generando las correspondientes señales de aviso y de control.
Usar un sistema automático de control de conducción, sencillo, útil, económico y seguro apoyado en unas franjas o bandas transversales y/o en el GPS.
Proporcionar simultáneamente múltiples señales de aviso tanto audibles como visuales y de control.
Aportar un sistema válido para todo tipo de trenes y vehículos rodados.
Utilizar múltiples dispositivos o sistemas detectores sin apenas incrementar los costes, con lo cual la fiabilidad y seguridad es mucho mayor.
Aportar un sistema, el cual en sencillez, economía, utilidad, versatilidad, amplitud de uso (puede utilizarse por todo el itinerario), seguridad y poder evitar accidentes, fallecimientos y lesionados no tiene competencia con todo lo existente.
DESCRIPCION DE LA INVENCION
El sistema y procedimiento de conducción automática y de aviso de datos o señales de tráfico para trenes y vehículos rodados de la invención del tipo que utilizan GPS y sistemas captadores inteligentes de aviso y conducción automática sobre las traviesas o la calzada, consiste en utilizar en la zona delantera, trasera o inferior del tren
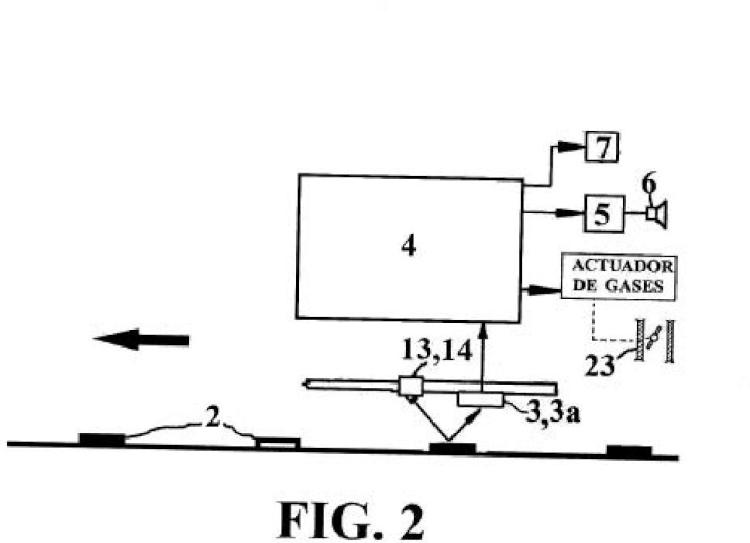
o vehículo uno o mas sistemas detectores y captadores de señales utilizando en múltiples puntos del itinerario de la vía unos elementos, franjas, bandas, cables de señalización reflectantes codificados y dispuestos en o sobre la calzada, las traviesas o soterrados en el balasto y/o señalando dichos puntos con GPS y las correspondientes señales de control y aviso. Las señales captadas se aplican directamente a un avisador luminoso o sonoro, a un microprocesador o al procesador principal del tren o vehículo, estos últimos decodifican y comparan las señales obtenidas con la velocidad de dicho tren o vehículo, calculando y proporcionando señales de control y de aviso acústicas y visuales. Las de control se aplican a un actuador que acciona la válvula de flujo de combustible que controla los gases o potencia del motor, o a los motores eléctricos accionadores de las ruedas durante todo el recorrido. Adicionalmente el microprocesador controla la actuación de los frenos. En caso de movimientos sísmicos, estos son detectados por los acelerómetros y el microprocesador automáticamente mandará reducir la velocidad.
El microprocesador o procesador principal recibe adicionalmente señales de GPS, acelerómetros y opcionalmente de giróscopos, frenos, acelerador, velocidad de ruedas del vehículo, condiciones de alerta y de un radar láser delantero, dichas señales son procesadas por el microprocesador.
El sistema captador puede consistir en al menos uno de estos sistemas: a) Un detector de metales, b) Un sistema de reflexión luminosa láser, c) Un sistema capacitivo, d) Un sistema electromagnético, e) Un sistema electrostático, f) Un sistema de inducción, g) Un sistema radar, h) Un sistema de microondas, i) Un sistema fotoeléctrico, j) Un sistema de infrarrojos y/o k) Un sistema de cámara de video. En todos los casos se usan unos elementos de señalización reflectantes o bandas codificadas, consistentes en unas bandas, líneas, franjas, placas, mallas, cables, sobre la calzada, balasto o soterrados en el interior del mismo, dispuestos transversal y/o longitudinalmente. Se puede usar pintura metalizada, consistente en pintura con una mezcla de polvo o grano metálico, pintura reflectante o unas franjas deslustradas o con rugosidades sobre las traviesas. En este último caso la zona rugosa actúa de zona antirreflexiva de las ondas luminosas. En algunos casos el emisor y el receptor forman un único elemento. El sistema de infrarrojos permite detectar personas o animales delante del vehículo.
Para el guiado de los vehículos rodados sobre las calzadas se usan líneas o franjas continuas (que pueden tener tramos discontinuos para codificar las velocidades), cables soterrados, etc., dispuestos a lo largo del eje longitudinal de las mismas o en sus
laterales y paralelos a dicho eje, siendo los desvíos detectados con una cámara de vídeo o con uno o mas sensores de dichas líneas, franjas, etc. Con tres sensores el central debe detectar la línea y los otros dos sus zonas contiguas informando al microprocesador.
Los elementos de señalización reflectantes reflejan las señales ópticas, infrarrojos, microondas, ondas electromagnéticas, inducción, electrostáticas o radiomagnéticas. Las bandas, líneas, franjas, etc. metálicas o de pintura pueden tener distintas anchuras. Las de pintura pueden añadir polvo o granulado de metales como el aluminio, el cobre, el bronce, materiales magnéticos o ferromagnéticos, etc. y pueden utilizar distintos colores, Pueden usar un solo sistema de reflexión o varios de ellos en la misma banda o en la misma superficie, un ejemplo puede ser una banda de pintura con subffanjas metálicas o de pinturas metálicas. Todos los cuales informan de la necesidad de reducir la velocidad del vehículo por curvas u otros motivos. En el caso de los sistemas láser y dada su precisión se pueden utilizar múltiples señales sobre el suelo que proporcionan gran cantidad de información.
Se pueden utilizar los cables soterrados en forma de lazos energizados eléctricamente o codificados con distintas corrientes, voltajes y frecuencias, con lo cual se pueden modificar las señales eléctricamente en función del día, hora o de la intensidad o intensidad estimada de tráfico.
Aunque son menos útiles también pueden utilizarse detectores de metales del tipo VLF, de muy baja frecuencia, PI de inducción pulsada, o BFO, o de detección por batido de frecuencia.
Los distintos sistemas detectan si se han sobrepasado dos o mas bandas, placas etc., separadas con distintas distancias de modo codificado, como un código de barras, a fin de que el microprocesador las identifique y envíe la señal a un generador de sonidos o de voz y/o señal visual, informando se está aproximando uno a una zona restrictiva y reduciendo la velocidad si llega el caso. Añadiendo un código de colores, las señales se pueden habilitar o desactivar en ciertos momentos o épocas. Como la cantidad de señales es inferior a las que se utilizan en las carreteras, puede ser suficiente una línea o señal por cada traviesa, e incluso utilizar el código binario, el cual una vez detectado se compara con las señales de referencia y velocidad del tren en el procesador y determina el tipo de aviso que se aplica o la señal de mando o control de la conducción del tren.
El sonido producido puede ser un simple zumbido o pitido o puede ser una voz generada por el propio microprocesador, por un microcircuito o por un generador de voces sintéticas, que avisa de zonas de velocidad reducida, precaución o de peligro.
Ejemplos de avisos: "Aproximación a zona restringida", "Zona de velocidad restringida a 5 Km.", "Precaución obras", "Animales sueltos", "Limite 120 Km./h", "Curva peligrosa a 4 Km.", "Manteniendo 120 Km./h", "Fin de limitación.", "Estación a 4 Km.", "Velocidad excesiva", "Fin de zona restringida", "Cruce sin guardabarrera", etc.
El aviso de las curvas y similares es útil para que el tren o vehículo reduzca la velocidad con suficiente antelación, antes de que la curva sea detectada por la cámara o radar láser. Las señales pueden modificarse en función de la hora o evento, controlándose a distancia alimentando cables eléctricos soterrados, útil en cruces de trenes sin...
Reivindicaciones:
1. Sistema de conducción automática y de aviso de datos o señales de tráfico para trenes y vehículos rodados del tipo que usan en el vehículo sistemas captadores inteligentes de aviso y conducción automática, que consiste en colocar en la zona delantera, trasera o inferior del tren o vehículo al menos un sistema detector y captador de señales utilizando unos elementos, franjas, bandas, cables de señalización reflectantes codificados y dispuestos en o sobre la calzada, las traviesas o soterrados en el balasto y/o señalando dichos puntos con GPS y las correspondientes señales de control y aviso, las señales captadas se aplican directamente a un avisador luminoso o sonoro, a un microprocesador o al procesador principal del tren o vehículo, estos últimos decodifican y comparan las señales obtenidas con la velocidad de dicho tren o vehículo, calculando y proporcionando señales de control y de aviso acústicas y visuales, las de control se aplican a un actuador que acciona la válvula de flujo de combustible, que controla los gases o potencia del motor o a los motores eléctricos accionadores de las ruedas durante todo el recorrido, adicionalmente el procesador o microprocesador controla la actuación de los frenos.
2. Sistema según reivindicación 1, caracterizado porque el microprocesador o procesador principal recibe adicionalmente señales de acelerómetros, opcionalmente de giróscopos, frenos, acelerador, velocidad de ruedas del vehículo, condiciones de alerta y del radar láser delantero.
3. Sistema según reivindicación 1, caracterizado porque el sistema captador consiste en un detector de metales.
4. Sistema según reivindicación 1, caracterizado porque el sistema captador consiste en un sistema de reflexión luminosa láser.
5. Sistema según reivindicación 1, caracterizado porque el sistema captador consiste en sistema capacitivo.
6. Sistema según reivindicación 1, caracterizado porque el sistema captador consiste en un sistema electrostático.
7. Sistema según reivindicación 1, caracterizado porque el sistema captador consiste en un sistema de inducción.
8. Sistema según reivindicación 1, caracterizado porque el sistema captador consiste en un sistema radar o infrarrojos delantero.
9. Sistema según reivindicación 1, caracterizado porque el sistema captador consiste en un sistema de microondas.
10. Sistema según reivindicación 1, caracterizado porque el sistema captador consiste en un sistema fotoeléctrico.
11. Sistema según reivindicación 1, caracterizado porque el sistema captador consiste en un sistema de cámara de video.
12. Sistema según reivindicación 3 a la 11, caracterizado porque en todos estos casos se usan unos elementos de señalización reflectantes o bandas codificadas, consistentes en unas bandas, líneas, franjas, placas, mallas o cables sobre la calzada, traviesas, balasto o soterrados en el interior del mismo, dispuestos transversal y/o longitudinalmente, utilizando pintura metalizada, consistente en pintura con una mezcla de polvo o grano metálico, pintura reflectante o unas franjas deslustradas o con rugosidades sobre las traviesas o calzada, en este último caso la zona rugosa actúa de zona antirreflexiva de las ondas luminosas.
13. Sistema según reivindicación 1, caracterizado porque los elementos de señalización reflectantes reflejan las señales ópticas, infrarrojos, microondas, ondas electromagnéticas, inducción, electrostáticas o radiomagnéticas.
14. Sistema según reivindicación 1, caracterizado porque el sistema captador consiste en bandas, líneas, franjas metálicas o de pintura de distintas anchuras.
15. Sistema según reivindicación 14, caracterizado porque las bandas, líneas, etc., de pintura añaden polvo o granulado de metales como el aluminio, el cobre, el bronce, materiales magnéticos o ferromagnéticos y utilizan distintos colores.
16. Sistema según reivindicación 1, caracterizado porque el sistema captador porta al menos un sistema de reflexión en cada banda, línea o franja.
17. Sistema según reivindicación 1, caracterizado por utilizar los cables soterrados en forma de lazos energizados eléctricamente o codificados con distintas corrientes, voltajes y frecuencias, modificando las señales eléctricamente en función del día, hora o de la intensidad o intensidad estimada de tráfico.
18. Sistema según reivindicación 1, caracterizado por utilizar detectores de metales del tipo VLF, de muy baja frecuencia, PI de inducción pulsada, o BFO, o de detección por batido de frecuencia.
19. Sistema según reivindicación 1, caracterizado por añadir un código de colores, y las señales se habilitan o desactivan en ciertos momentos o épocas.
20. Sistema según reivindicación 1, caracterizado porque el sonido producido es una voz generada por el propio microprocesador, por un microcircuito o por un generador de voces sintéticas, que indica no rebasar una determinada velocidad.
21. Sistema según reivindicación 1, caracterizado porque se colocan las señales, franjas, bandas, etc. periódicamente y para el control o conducción constante y automática del tren o vehículo en todo el trayecto o recorrido.
22. Sistema según reivindicación 1, caracterizado porque el material metálico usado en las líneas, franjas, cables, bandas, mallas, es magnético o no magnético.
23. Sistema según reivindicación 1, caracterizado porque para el guiado de los vehículos rodados sobre las calzadas se usan las líneas o franjéis continuas, o continuas con tramos discontinuos para codificar las velocidades, cables soterrados, etc., dispuestos a lo largo del eje longitudinal de las mismas o en sus laterales y paralelos a dicho eje, siendo los desvíos detectados con una cámara de vídeo o con uno o mas sensores de dichas líneas, franjas, etc. que informan de dicho desvío, con tres sensores el central detecta la línea y los otros dos sus zonas contiguas informando al microprocesador.
24. Sistema según reivindicación 1, caracterizado porque a los emisores y detectores fotoeléctricos, láser, etc. se les añade un sistema automático de limpieza del barro y suciedad, mediante una escobilla oscilante y/o un chorro de agua.
25. Sistema según reivindicación 1, caracterizado porque la separación entre líneas o franjas o su grosor en una o varias traviesas determina el tipo de aviso.
26. Sistema según reivindicación 1, caracterizado porque una sola, banda, línea o franja porta varios avisos utilizando distintos colores.
27. Sistema según reivindicación 1, caracterizado porque para los avisos luminosos se utilizan luces o diodos de varios colores.
28. Sistema según reivindicación 1, caracterizado por usar varios grupos de líneas, bandas, cables, etc., separados entre si.
29. Sistema según reivindicación 1, caracterizado porque con líneas o franjéis de dos anchuras se utiliza una información codificada similar al Morse, de modo que al circular el vehículo sobre las mismas detecta las líneas estrechas como puntos y las anchas como rayas.
30. Sistema según reivindicación 1, caracterizado porque los avisos se visualizan en una pantalla e igualmente algunas luces hasta que se sobrepase la zona restrictiva.
31. Sistema según reivindicación 1, caracterizado por utilizar avisos audibles de "Curva peligrosa", "Fin de limitación.", "Estación a 4 Km.", "Fin de zona restringida", "Cruce sin guardabarrera", "Velocidad excesiva" o similares.
32. Sistema según reivindicación 1, caracterizado porque se utiliza una sola
franja, banda, raya, etc. en o sobre cada una de las traviesas.
33. Sistema según reivindicación 1, caracterizado porque se utiliza un código binario.
34. Sistema según reivindicación 1, caracterizado porque cuando las traviesas no son visibles se utilizan los elementos reflectantes sobre los soportes laterales de sujeción de las mismas o pinturas, cables etc. sobre o en el interior del balasto.
35. Sistema según reivindicación 1, caracterizado porque se utilizan distintas codificaciones para vías distintas enviando señales a un ordenador central que compara con las de otros vehículos, avisando del posible uso de la misma vía por dos vehículos circulando en sentido contrario.
36. Procedimiento de conducción automática y de aviso de datos o señales de tráfico para trenes y vehículos rodados, que consiste en colocar en la zona delantera, trasera o inferior del tren o vehículo al menos un sistema detector y captador de señales utilizando unos elementos, franjas, bandas, cables de señalización reflectantes codificados y dispuestos en o sobre la calzada, las traviesas o soterrados en el balasto y/o señalando dichos puntos con GPS y las correspondientes señales de control y aviso, las señales captadas se aplican directamente a un avisador luminoso o sonoro, a un microprocesador o al procesador principal del tren o vehículo, estos últimos decodifican y comparan las señales obtenidas con la velocidad de dicho tren o vehículo, calculando y proporcionando señales de control y de aviso acústicas y visuales, las de control se aplican a un actuador que acciona la válvula de flujo de combustible, que controla los gases o potencia del motor o a los motores eléctricos accionadores de las ruedas durante todo el recorrido, adicionalmente el procesador o microprocesador controla la actuación de los frenos.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]