Sistema robótico médico con brazo manipulador del tipo de coordenadas cilíndricas.
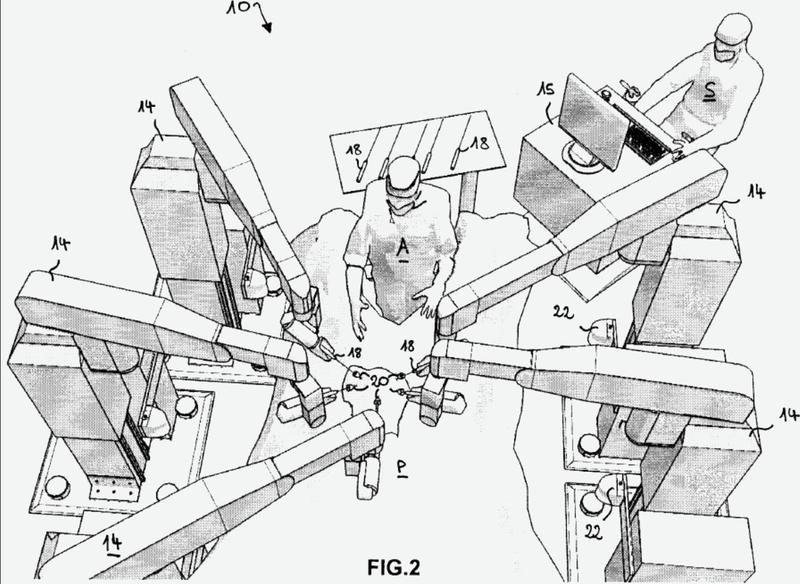
Sistema robótico médico para llevar a cabo procedimientos médicos,
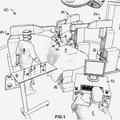
que comprende un manipulador de robot (14) para la manipulación asistida por robot de un instrumento médico (18), en el que dicho manipulador de robot comprende:
una base (24);
un brazo (26) de manipulador, que tiene una parte esencialmente vertical (27) soportada por dicha base y una parte esencialmente horizontal (29) soportada por dicha parte vertical;
una muñeca (28) de manipulador, soportada por dicho brazo del manipulador; y
una unidad efectora (30), soportada por dicha muñeca del manipulador y configurada para sujetar un instrumento médico;
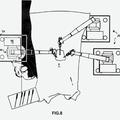
dicho brazo (26) del manipulador tiene una configuración cinemática PRP cilíndrica, que tiene, en secuencia y únicamente las tres articulaciones siguientes, una primera articulación (P) (J1) prismática para variar la altura de dicha parte vertical proporcionando un grado de libertad en traslación a lo largo de un eje esencialmente vertical, una segunda articulación (R) (J2) giratoria para variar el ángulo de rotación entre dicha parte vertical y dicha parte horizontal proporcionando un grado de rotación de libertad sobre un eje esencialmente vertical, y una tercera articulación (P) (J3) prismática para variar el alcance de dicha parte horizontal proporcionando un grado de libertad de traslación a lo largo de un eje esencialmente horizontal, y
caracterizado por que dicha muñeca (28) del manipulador comprende, en secuencia después de dicha tercera articulación (J3), una cuarta articulación (R) (J4) giratoria y una quinta articulación (R) (J5) giratoria para orientar la unidad efectora (30), siendo los ejes de rotación de dicha cuarta articulación (R) (J4) y dicha segunda articulación (R) (J2) paralelos.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/051044.
Solicitante: THE EUROPEAN ATOMIC ENERGY COMMUNITY (EURATOM), REPRESENTED BY THE EUROPEAN COMMISSION.
Nacionalidad solicitante: Bélgica.
Dirección: 200, rue de la Loi 1049 Brussels BELGICA.
Inventor/es: RUIZ MORALES,Emilio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B34/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Cirugía asistida por ordenador; Operadores o robots adaptados de forma especial para su uso en cirugía.
- A61B34/30 A61B […] › A61B 34/00 Cirugía asistida por ordenador; Operadores o robots adaptados de forma especial para su uso en cirugía. › Robots quirúrgicos.
- A61B34/37 A61B 34/00 […] › Robots tipo maestro-esclavo (A61B 34/35 tiene prioridad).
- A61B90/00 A61B […] › Instrumentos, utensilios o accesorios especialmente adaptados para cirugía o diagnóstico no cubiertos por alguno de los grupos A61B 1/00 - A61B 50/00, p. ej. para el tratamiento de luxaciones o para proteger los bordes de las heridas (máscaras faciales protectoras A41D 13/11; batas o ropa de cirujanos o 'pacientes' A41D 13/12; dispositivos para extraer, tratar o transportar los líquidos corporales A61M 1/00).
- B25J9/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › por rotación de un brazo al menos, excluyendo el movimiento de la mano, p. ej. del tipo coordenadas cilíndricas o coordenadas polares.
PDF original: ES-2689093_T3.pdf


Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Máquina herramienta para la mecanización por arranque de virutas de una pieza de trabajo así como conjunto de soporte de husillo para el empleo en una máquina herramienta de este tipo, del 6 de Noviembre de 2019, de DECKEL MAHO PFRONTEN GMBH: Conjunto de soporte de husillo para el empleo en una máquina herramienta, con: - una sección de alojamiento del brazo articulado que se puede disponer o bien […]
Robot de instalación de revestimiento, en particular robot de manipulación, del 4 de Septiembre de 2019, de Dürr Systems AG: Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil […]
Robot industrial de múltiples ejes, en particular de tipo SCARA, del 28 de Febrero de 2019, de COMAU S.P.A.: Un robot industrial de múltiples ejes, en particular de tipo SCARA, que comprende: - una estructura base; - un primer brazo de robot conectado de manera […]
Robot industrial de ejes múltiples, en particular de tipo SCARA, del 23 de Enero de 2019, de COMAU S.P.A.: Un robot industrial de ejes múltiples, en particular de tipo SCARA, que comprende: - una estructura de base; - un primer brazo […]
Sistema de posicionador de pacientes, del 8 de Noviembre de 2017, de Henderson, Toby D: Un sistema de posicionador de pacientes, que comprende: un brazo robótico que proporciona cinco grados de libertad de rotación y un […]
AERONAVE CON DISPOSITIVO DE CONTACTO, del 2 de Junio de 2017, de FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL: Aeronave con dispositivo de contacto. Aeronave con capacidad de vuelto estacionario y con dispositivo de contacto. Comprende un cuerpo principal […]
SISTEMA ROBÓTICO DE COLOCACIÓN RADIAL DE HERRAMIENTAS, del 24 de Octubre de 2011, de COMAU, INC: Sistema robótico de colocación de herramientas para la colocación de una primera herramienta y de una segunda herramienta , que comprende: un árbol interior […]