PROCEDIMIENTO Y DISPOSITIVO DE MANDO DE LAS RUEDAS DIRECTRICES DE UN REMOLQUE.
Procedimiento de mando de las ruedas directrices (200, 220) de un remolque (2) unido por una articulación (13) a un vehículo tractor (1) que comprende:
- por lo menos un medio de conexión hidráulica del remolque (2) a un circuito hidráulico a presión del vehículo tractor;
- un mecanismo de dirección que actúa sobre las ruedas directrices del remolque por lo menos por un gato hidráulico, por medio de una unidad de mando (UH) hidráulica conectada al medio de conexión;
- una unidad electrónica (UE) para mandar dicha unidad de mando hidráulico (UH) en función de señales proporcionadas por unos sensores (C1, C2);
- por lo menos un sensor de ángulo (C1) que proporciona a dicha unidad electrónica (UE) un valor de señal representativo del ángulo formado por los ejes longitudinales (12, 23) respectivos del vehículo tractor (1) y del remolque (2);
- un sensor de control (C2) que suministra a la unidad electrónica (UE) un valor de señal representativo de la posición de las ruedas directrices (200, 220) del remolque (2);
caracterizado porque consiste en realizar las etapas siguientes:
a) en un primer modo -denominado modo de aprendizaje- en el que la alimentación hidráulica del remolque (2) está cortada:
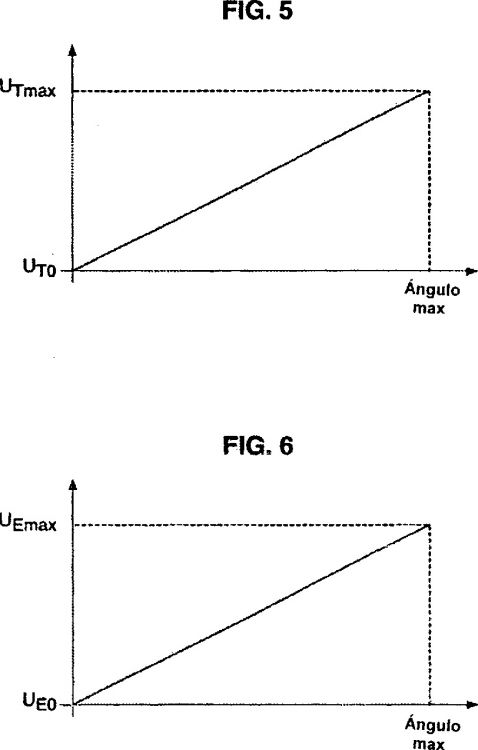
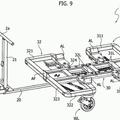
- medir y registrar las señales proporcionadas por dichos sensores (C1, C2), por una parte cuando el vehículo (1) y el remolque (2) están alineados y, por otra parte, cuando el vehículo (1) está en posición de viraje máximo con respecto al remolque (2);
- a partir de estas señales, establecer para cada sensor, la relación valor de la señal =f (ángulo); y
b) después en un segundo modo -denominado modo de regulación- en el que la alimentación hidráulica del remolque (2) está restablecida:
- comparar regularmente los valores de las señales proporcionadas por dichos sensores (C1, C2) y, en la eventualidad de que sean diferentes, asignar al sensor de control (C2) el mismo valor que el del sensor de ángulo (C1) para corregir este ángulo teniendo en cuenta dicha relación y mandar la unidad de mando hidráulico (UH) con el fin de modificar la orientación de las ruedas directrices (200, 220) del remolque (2)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07122500.
Solicitante: MONROC.
Nacionalidad solicitante: Francia.
Dirección: LIEU-DIT LA MARTINIERE,85670 SAINT ETIENNE DU BOIS.
Inventor/es: CROIX,OLIVIER.
Fecha de Publicación: .
Fecha Solicitud PCT: 6 de Diciembre de 2007.
Fecha Concesión Europea: 24 de Febrero de 2010.
Clasificación Internacional de Patentes:
- B62D13/02B
- B62D13/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 13/00 Dirección adaptada especialmente a los remolques (atalaje de tracción y de dirección combinados B60D). › para ruedas de giro individual.
Clasificación PCT:
- B62D13/04 B62D 13/00 […] › para ruedas de giro individual.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento y dispositivo de mando de las ruedas directrices de un remolque.
La presente invención se refiere a un procedimiento de mando de las ruedas directrices de un remolque unido por una articulación a un vehículo tractor. La misma se refiere asimismo a un dispositivo para la realización de este procedimiento.
Los constructores de remolques, y muy particularmente de remolques agrícolas, equipan un cierto número de estos vehículos con un sistema de pilotaje de ejes.
Este sistema tiene en cuenta el ángulo de viraje del tractor con respecto al remolque y, por lo menos un gato hidráulico que une este tractor al remolque, actúa sobre la orientación de las ruedas directrices asociadas a uno, incluso a dos ejes de dirección del remolque.
Se trata de un sistema exclusivamente hidráulico que, según el principio de los "vasos comunicantes" pilota la orientación de las ruedas del remolque. Se mejora así netamente la maniobrabilidad del remolque, reduciendo al mismo tiempo el desgaste de los neumáticos que lo equipan.
Sin embargo, este sistema necesita una regulación precisa, y está sujeto a fugas hidráulicas y su utilización es onerosa.
Se describe en el documento EP-A-0 282 426, un dispositivo de mando de las ruedas directrices de un remolque, según el preámbulo de la reivindicación 3.
En el seno de este dispositivo, la presencia de sensores y de una unidad de mando electrónica permite solucionar los problemas enumerados anteriormente, relacionados con la utilización del "todo hidráulico".
Sin embargo, los medios específicos de este dispositivo están destinados a un par vehículo tractor/remolque predeterminado. En particular, este dispositivo necesita un montaje particular, según una geometría particular, en la parte posterior del tractor.
Ahora bien, cada vez está más extendido que unos agricultores se agrupen en cooperativas de utilización de material agrícola (CUMA), lo que significa por ejemplo que el agricultor tomará prestado, al volante de su vehículo, un remolque disponible en la CUMA durante un tiempo determinado.
La presente invención prevé por tanto en particular perfeccionar el dispositivo del documento citado, para que pueda ser plenamente funcional, incluso en la situación que acaba de ser descrita, es decir, en la que un mismo remolque es susceptible de ser enganchado a unos vehículos tractores diferentes.
Así, la presente invención se refiere en primer lugar a un procedimiento de mando de las ruedas directrices de un remolque unido por una articulación a un vehículo tractor que comprende:
- por lo menos un medio de conexión hidráulica del remolque a un circuito hidráulico a presión del vehículo tractor;
- un mecanismo de dirección que actúa sobre las ruedas directrices del remolque por lo menos por un gato hidráulico, por medio de una unidad de mando hidráulica conectada al medio de conexión;
- una unidad electrónica para mandar dicha unidad de mando hidráulico en función de señales proporcionadas por unos sensores;
- por lo menos un sensor de ángulo que proporciona a dicha unidad electrónica un valor de señal representativo del ángulo formado por los ejes longitudinales respectivos del vehículo tractor y del remolque;
- un sensor de control que suministra a la unidad electrónica un valor de señal representativo de la posición de las ruedas directrices del remolque.
Este procedimiento es particularmente destacable por el hecho de que consiste en efectuar las etapas siguientes:
a) en un primer modo -denominado modo de aprendizaje- en el que la alimentación hidráulica del remolque está cortada:
- medir y registrar las señales proporcionadas por dichos sensores, por una parte cuando el vehículo y remolque están alineados y, por otra parte, cuando el vehículo está en posición de viraje máximo con respecto al remolque,
- a partir de estas señales, establecer para cada sensor, la relación valor de la señal =f (ángulo);
b) después en un segundo modo -denominado modo de regulación- en el que la alimentación hidráulica del remolque está restablecida:
- comparar regularmente los valores de las señales proporcionadas por dichos sensores y, en la eventualidad en que son diferentes, asignar al sensor de control el mismo valor que el del sensor de ángulo para corregir este ángulo teniendo en cuenta dicha relación y mandar la unidad de mando hidráulica con vistas a modificar la orientación de las ruedas directrices del remolque.
Gracias al procedimiento de la invención, cada vez que un vehículo tractor diferente será asociado al remoque, será suficiente que el usuario realice las etapas que acaban de ser descritas para que el par vehículo/remolque sea plenamente funcional. El remolque no está por tanto destinado a un vehículo, e inversamente.
Otro aspecto de la invención se refiere a un dispositivo de mando de ruedas directrices de un remoque unido por una articulación a un vehículo tractor, para la realización del procedimiento descrito anteriormente, comprendiendo este dispositivo:
- por lo menos un medio de conexión hidráulica del remolque a un circuito hidráulico a presión del vehículo tractor;
- un mecanismo de dirección que actúa sobre las ruedas directrices del remolque por lo menos por un gato hidráulico, por medio de una unidad de mando hidráulico conectada al medio de conexión;
- una unidad electrónica para mandar dicha unidad de mando hidráulico en función de señales proporcionadas por unos sensores;
- por lo menos un sensor de ángulo que proporciona a dicha unidad electrónica un valor de señal representativo del ángulo formado por los ejes longitudinales respectivos del vehículo tractor y del remolque;
- un sensor de control que suministra a la unidad electrónica un valor de señal representativo de la posición de las ruedas directrices del remolque.
Según la invención, dicha unidad electrónica comprende unos medios:
a) en un primer modo -denominado modo de aprendizaje- en el que la alimentación hidráulica del remoque está cortada:
- de medición y registro de unas señales proporcionadas por dichos sensores por una parte cuando el vehículo y el remolque están alineados y, por otra parte, cuando el vehículo está en posición de viraje máximo con respecto al remolque;
- de establecimiento, a partir de estas señales y para cada sensor, de la relación valor de la señal = f (ángulo);
b) en un segundo modo -denominado modo de regulación- en el que la alimentación hidráulica del remolque está restablecida:
- de comparación regular de los valores de las señales proporcionadas por dichos sensores y, en la eventualidad de que sean diferentes, asignar al sensor de control el mismo valor que el del sensor de ángulo para corregir este ángulo teniendo en cuenta dicha relación y mandar la unidad de mando hidráulico con vistas a modificar la orientación de las ruedas directrices del remolque.
Según otras características ventajosas y no limitativas de la invención:
- dichos sensores son unos potenciómetros de efecto Hall;
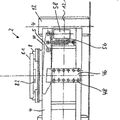
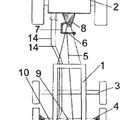
- dicho sensor de ángulo está fijado sobre un timón solidario del remolque, de articulación sobre el vehículo tractor y está unido, por una unión articulada en paralelogramo deformable, a dicho vehículo;
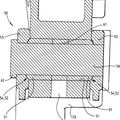
- dicho sensor de control está montado en el pivote del eje de las ruedas directrices del remolque;
- comprende una caja soportada por dicho vehículo tractor, a disposición de su conductor, y conectada a dicha unidad electrónica, comprendiendo esta caja unos medios de conmutación del modo de aprendizaje al modo de regulación e inversamente, así como unos medios de validación de las mediciones de las señales leídas en dicho estado de aprendizaje;
- dicha unidad de mando hidráulico comprende unos distribuidores hidráulicos proporcionales;
- dicha unidad electrónica comprende unos medios apropiados, en caso de detección de un error, para mandar la orientación de las ruedas directrices bloqueadas en posición recta, es decir paralelas al eje longitudinal del remolque.
Otras características y ventajas de la presente invención se pondrán más claramente de manifiesto a partir de la lectura de la descripción detallada...
Reivindicaciones:
1. Procedimiento de mando de las ruedas directrices (200, 220) de un remolque (2) unido por una articulación (13) a un vehículo tractor (1) que comprende:
- por lo menos un medio de conexión hidráulica del remolque (2) a un circuito hidráulico a presión del vehículo tractor;
- un mecanismo de dirección que actúa sobre las ruedas directrices del remolque por lo menos por un gato hidráulico, por medio de una unidad de mando (UH) hidráulica conectada al medio de conexión;
- una unidad electrónica (UE) para mandar dicha unidad de mando hidráulico (UH) en función de señales proporcionadas por unos sensores (C1, C2);
- por lo menos un sensor de ángulo (C1) que proporciona a dicha unidad electrónica (UE) un valor de señal representativo del ángulo formado por los ejes longitudinales (12, 23) respectivos del vehículo tractor (1) y del remolque (2);
- un sensor de control (C2) que suministra a la unidad electrónica (UE) un valor de señal representativo de la posición de las ruedas directrices (200, 220) del remolque (2);
caracterizado porque consiste en realizar las etapas siguientes:
a) en un primer modo -denominado modo de aprendizaje- en el que la alimentación hidráulica del remolque (2) está cortada:
- medir y registrar las señales proporcionadas por dichos sensores (C1, C2), por una parte cuando el vehículo (1) y el remolque (2) están alineados y, por otra parte, cuando el vehículo (1) está en posición de viraje máximo con respecto al remolque (2);
- a partir de estas señales, establecer para cada sensor, la relación valor de la señal =f (ángulo); y
b) después en un segundo modo -denominado modo de regulación- en el que la alimentación hidráulica del remolque (2) está restablecida:
- comparar regularmente los valores de las señales proporcionadas por dichos sensores (C1, C2) y, en la eventualidad de que sean diferentes, asignar al sensor de control (C2) el mismo valor que el del sensor de ángulo (C1) para corregir este ángulo teniendo en cuenta dicha relación y mandar la unidad de mando hidráulico (UH) con el fin de modificar la orientación de las ruedas directrices (200, 220) del remolque (2).
2. Procedimiento según la reivindicación 1, caracterizado porque se utiliza una unidad de mando hidráulico (UH) que comprende unos distribuidores hidráulicos proporcionales.
3. Dispositivo de mando de las ruedas directrices (200, 220) de un remolque (2) unido por un articulación (13) a un vehículo tractor (1), para la realización del procedimiento según la reivindicación 1 ó 2, comprendiendo este dispositivo:
- por lo menos un medio de conexión hidráulica del remolque (2) a un circuito hidráulico a presión del vehículo tractor;
- un mecanismo de dirección que actúa sobre las ruedas directrices del remolque por lo menos por un gato hidráulico, a través de una unidad de mando (UH) hidráulico conectada al medio de conexión;
- una unidad electrónica (UE) para mandar dicha unidad de mando hidráulico en función de señales proporcionadas por unos sensores (C1, C2);
- por lo menos un sensor de ángulo (C1) que proporciona a dicha unidad electrónica (UE) un valor de señal representativo del ángulo formado por los ejes longitudinales (12, 23) respectivos del vehículo tractor (1) y del remolque (2);
- un sensor de control (C2) que suministra a la unidad electrónica (UE) un valor de señal representativo de la posición de las ruedas directrices (200, 220) del remolque (2),
caracterizado porque dicha unidad electrónica (UE) integra unos medios:
a) en un primer modo- denominado modo de aprendizaje- en el que la alimentación hidráulica del remolque (2) está cortada:
- de medición y registro de las señales proporcionadas por dichos sensores (C1, C2) por una parte cuando el vehículo (1) y el remolque (2) están alineados y, por otra parte, cuando el vehículo (1) está en posición de viraje máximo con respecto al remolque (2);
- de establecimiento, a partir de estas señales y para cada sensor, la relación valor de la señal = f (ángulo);
b) en un segundo modo -denominado modo de regulación- en el que la alimentación hidráulica del remolque (2) está restablecida:
- de comparación regular de los valores de las señales proporcionados por dichos sensores (C1, C2) y, en la eventualidad de que sean diferentes, asignar al sensor de control (C2) el mismo valor que el del sensor de ángulo (C1) para corregir este ángulo teniendo en cuenta dicha relación y mandar la unidad de mando hidráulico con vistas a modificar la orientación de las ruedas directrices (200, 220) del remolque (2).
4. Dispositivo según la reivindicación 3, caracterizado porque dichos sensores (C1, C2) son unos potenciómetros de efecto Hall.
5. Dispositivo según la reivindicación 3 ó 4, caracterizado porque dicho sensor de ángulo (C1) está fijado sobre un timón (24) solidario del remolque (2), de articulación sobre el vehículo tractor (1) que está unido, por una unión articulada (3) de paralelogramo deformable, a dicho vehículo.
6. Dispositivo según una de las reivindicaciones 3 a 5, caracterizado porque dicho sensor de control (C2) está montado en el pivote del eje (20) de las ruedas (200, 220) directrices del remolque (2).
7. Dispositivo según una de las reivindicaciones 3 a 6, caracterizado porque comprende una caja (BE) soportada por dicho vehículo tractor (1), a disposición de su conductor, y conectada a dicha unidad electrónica (UE), comprendiendo esta caja (BE) unos medios de conmutación del modo de aprendizaje al modo de regulación e inversamente, así como unos medios de validación de las mediciones de las señales leídas en dicho estado de aprendizaje.
8. Dispositivo según una de las reivindicaciones 3 a 7, caracterizado porque dicha unidad de mando hidráulico (UH) comprende unos distribuidores hidráulicos proporcionales.
9. Dispositivo según una de las reivindicaciones 3 a 8, caracterizado porque dicha unidad electrónica (UE) comprende unos medios apropiados, en caso de detección de un error, para mandar la orientación de las ruedas directrices (200, 220) bloqueadas en posición recta, es decir paralelas al eje longitudinal (23) del remolque (2).
Patentes similares o relacionadas:
Carro de transporte con ruedas de dirección, del 3 de Abril de 2019, de TELLURE ROTA S.P.A.: Carro de transporte que comprende - un bastidor que se extiende desde una porción delantera a una porción trasera , a lo largo de una dirección […]
 Carretilla para el transporte de contenedores para piezas o componentes en una planta industrial, del 13 de Abril de 2016, de COMAU S.P.A.: Una carretilla para el transporte de contenedores para piezas o componentes en una planta industrial, que comprende:
• una estructura provista de una […]
Carretilla para el transporte de contenedores para piezas o componentes en una planta industrial, del 13 de Abril de 2016, de COMAU S.P.A.: Una carretilla para el transporte de contenedores para piezas o componentes en una planta industrial, que comprende:
• una estructura provista de una […]
PROCEDIMIENTO Y DISPOSITIVO DE GUÍA DE UN REMOLQUE Y VEHÍCULO EQUIPADO CON DICHO DISPOSITIVO, del 19 de Septiembre de 2011, de OPTIMA CONCEPT S.A.R.L: Procedimiento de guiado de un remolque (RQ) equipado con al menos un eje remolcado (R) directriz, a lo largo de la trayectoria (C) descrita por […]
 GRUPO DE EJES PARA LA PREPARACION PARA UTILIZAR REMOLQUES EN GENERAL, del 9 de Junio de 2010, de D.B.D. S.P.A: Grupo de ejes destinado a su asociación con unos medios arrastrados, como un remolque con por lo menos un eje, que comprende un elemento transversal […]
GRUPO DE EJES PARA LA PREPARACION PARA UTILIZAR REMOLQUES EN GENERAL, del 9 de Junio de 2010, de D.B.D. S.P.A: Grupo de ejes destinado a su asociación con unos medios arrastrados, como un remolque con por lo menos un eje, que comprende un elemento transversal […]
 EJE DE TIPO DOLLY, del 2 de Junio de 2010, de FAHRZEUGWERK BERNARD KRONE GMBH: Eje Dolly ; con una barra de remolque tractora que en un bastidor está fijada de manera giratoria alrededor de un eje vertical y con un acoplamiento […]
EJE DE TIPO DOLLY, del 2 de Junio de 2010, de FAHRZEUGWERK BERNARD KRONE GMBH: Eje Dolly ; con una barra de remolque tractora que en un bastidor está fijada de manera giratoria alrededor de un eje vertical y con un acoplamiento […]
 EJE DE TIPO DOLLY, del 3 de Mayo de 2010, de FAHRZEUGWERK BERNARD KRONE GMBH: Eje Dolly ; con una barra de remolque tractora que en un bastidor está fijada de manera giratoria alrededor de un eje vertical y con un acoplamiento […]
EJE DE TIPO DOLLY, del 3 de Mayo de 2010, de FAHRZEUGWERK BERNARD KRONE GMBH: Eje Dolly ; con una barra de remolque tractora que en un bastidor está fijada de manera giratoria alrededor de un eje vertical y con un acoplamiento […]
 UNIDAD DE RUEDA SIMPLE DIRIGIBLE PARA TRAILERES, del 29 de Marzo de 2010, de STEERABLE WHEEL SYSTEMS PTY LTD: Una unidad de rueda simple , adaptada para montarse en un cuerpo de vehículo , que comprende:
un bastidor de rueda que soporta un mecanismo de […]
UNIDAD DE RUEDA SIMPLE DIRIGIBLE PARA TRAILERES, del 29 de Marzo de 2010, de STEERABLE WHEEL SYSTEMS PTY LTD: Una unidad de rueda simple , adaptada para montarse en un cuerpo de vehículo , que comprende:
un bastidor de rueda que soporta un mecanismo de […]
 DISPOSITIVO DIRECCIONAL PARA REMOLQUES, del 13 de Mayo de 2010, de TALLERES CARRUXO S.L: 1. Dispositivo direccional para remolques, que siendo aplicable a las ruedas posteriores de un remolque arrastrado por un vehículo tractor, con el fin de conseguir […]
DISPOSITIVO DIRECCIONAL PARA REMOLQUES, del 13 de Mayo de 2010, de TALLERES CARRUXO S.L: 1. Dispositivo direccional para remolques, que siendo aplicable a las ruedas posteriores de un remolque arrastrado por un vehículo tractor, con el fin de conseguir […]