PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA POSICIÓN ANGULAR DEL ROTOR DE UNA MÁQUINA ELÉCTRICA GIRATORIA.
Procedimiento para la determinación de la posición angular de rotor de una máquina eléctrica giratoria,
cuya máquina presenta un con junto de arrollamiento del estator y un conjunto de arrollamiento del rotor, en el que el conjunto de arrollamiento del estator es alimentado por una unidad de conversión correspondiente, y el conjunto de arrollamiento del estator es cortocircuitado por medio de la unidad de conversión dentro de una revolución del rotor a una velocidad supuesta del rotor y en el instante del cortocircuito se calcula el ángulo de las fases de la corriente del estator, caracterizado porque el conjunto de arrollamiento del estator es cortocircuitado por medio de la unidad de conversión dentro de una revolución del rotor a una velocidad supuesta del rotor en al menos tres instantes de cortocircuito (T0, T1, T2) predeterminables, porque en cada instante de cortocircuito (T0, T1, T2), se calcula el ángulo de las fases (T0, T1, T2) de la corriente respectiva del estator (iST0, iST1, iST2), porque a partir de los ángulos de las fases (T0, T1, T2) calculados en cada caso en dos instantes de cortocircuito más próximos en el tiempo entre sí, se forma un ángulo diferencial de las fases (i1, i2), porque el ángulo diferencial mínimo de las fases (imin) se calcula a partir de los ángulos diferenciales de las fases (i1, i2), y porque en el caso de un ángulo diferencial mínimo negativo de las fases (imán), se suma un ángulo de corrección de las fases (iK) al último ángulo calculado de las fases y en el caso de un ángulo diferencial mínimo positivo de las fases (imin), se resta el ángulo de corrección de las fases (iK) del último ángulo calculado de las fases T2
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06405343.
Solicitante: ABB SCHWEIZ AG.
Nacionalidad solicitante: Suiza.
Dirección: BROWN BOVERI STRASSE 6 5400 BADEN SUIZA.
Inventor/es: Harder,Thorsten, Beiser,Dirk, Conticelli,Fabio, Bohren,Patrick.
Fecha de Publicación: .
Fecha Solicitud PCT: 14 de Agosto de 2006.
Clasificación Internacional de Patentes:
- H02P6/18 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › sin elementos separados para detectar la posición.
Clasificación PCT:
- H02P6/18 H02P 6/00 […] › sin elementos separados para detectar la posición.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2362003_T3.pdf
Fragmento de la descripción:
Campo técnico
La invención se refiere al campo de los procedimientos de funcionamiento de máquinas eléctricas giratorias. Parte de un procedimiento para la determinación de la posición angular del rotor o bien para la determinación del ángulo de flujo magnético de una máquina eléctrica giratoria de acuerdo con el preámbulo de la reivindicación independiente.
Estado de la técnica
Una máquina eléctrica giratoria habitual actualmente presenta un conjunto de arrollamiento de estator y un conjunto de arrollamiento de rotor, siendo alimentado el conjunto de arrollamiento de estator típicamente por una unidad de conversión correspondiente. La posición angular del rotor de una máquina eléctrica giratoria de este tipo se determina hoy en día principalmente por el transmisor giratorio, que proporciona la posición angular deseada del rotor, es decir, el ángulo del rotor durante su rotación o bien el ángulo de flujo magnético. El conocimiento de la posición del rotor o bien de la posición del vector de flujo magnético se necesita típicamente para la regulación de la máquina como una de varias magnitudes de entrada más habituales. Pero los transmisores giratorios son muy sensibles frente a solicitación mecánica y, por lo tanto, fallan con frecuencia o proporcionan valores erróneos de la posición angular del rotor. Además, el montaje es costoso, puesto que el transmisor giratorio propiamente dicho y, además, el cableado deben colocarse en la máquina, lo que es intensivo de trabajo y de costes. Además, un transmisor giratorio de este tipo debe mantenerse siempre, lo que significa un gasto adicional.
En el documento US 2002/0043953 A1 se indica un procedimiento para la determinación de la posición angular del rotor de una máquina eléctrica giratoria, cuya máquina presenta un conjunto de arrollamiento de estator y un conjunto de arrollamiento de rotor y en cuyo procedimiento el conjunto de arrollamiento de estator es alimentado por una unidad de conversión correspondiente. El conjunto de arrollamiento de estator es cortocircuitado una vez por medio de la unidad de conversión dentro de una rotación del rotor a una velocidad supuesta del rotor. En el instante del cortocircuito único, se calcula el ángulo de las fases de la corriente del estator y se añade un ángulo de corrección de las fases al ángulo de las fases calculado.
En el documento 6.281.656 B1 se muestra otro procedimiento para la determinación de la posición angular del rotor de una máquina eléctrica giratoria de acuerdo con el estado de la técnica.
Representación de la invención
Por lo tanto, el cometido de la invención es indicar un procedimiento para la determinación de la posición angular del rotor de una máquina eléctrica giratoria, que se puede realizar muy fácilmente y es robusta y no requiere transmisor giratorio. Este cometido se soluciona por medio de las características de la reivindicación 1. En las reivindicaciones dependientes se indican desarrollos ventajosos de la invención.
En el procedimiento de acuerdo con la invención para la determinación de la posición angular del rotor de una máquina eléctrica giratoria, la máquina presenta un conjunto de arrollamiento de estator y un conjunto de arrollamiento de rotor, en el que el conjunto de arrollamiento de estator es alimentado por una unidad de conversión correspondiente. De acuerdo con la invención, entonces el conjunto de arrollamiento del estator es cortocircuitado por medio de la unidad de conversión dentro de una rotación del rotor a una velocidad supuesta del rotor en al menos tres instantes de cortocircuito predeterminables. En cada instante de cortocircuito se calcula el ángulo de las fases de la corriente respectiva del estator. Además, a partir de de los ángulos de las fases calculados, respectivamente, en dos instantes de cortocircuito más próximos en el tiempo entre sí, se forma un ángulo diferencial de las fases y el ángulo diferencial mínimo de las fases se calcula a partir de los ángulos diferenciales de las fases. En el caso de un ángulo diferencial mínimo negativo de las fases, se suma un ángulo de corrección de las fases al último ángulo calculado de las fases y en el caso de un ángulo diferencial mínimo positivo de las fases, se resta el ángulo de corrección de las fases del último ángulo calculado de las fases. El resultado después de la adición del ángulo de corrección de las fases o bien después de la sustracción del ángulo de corrección de las fases es entonces la posición angular del rotor buscada. La determinación de la posición del ángulo del rotor de una máquina eléctrica giratoria de acuerdo con el procedimiento según la invención es posible, por lo tanto, de manera ventajosa sin transmisor giratorio con todos sus inconvenientes, de manera que, en general, se consigue un procedimiento muy fácil de realizar y robusto para la determinación de la posición angular del rotor de una máquina eléctrica giratoria.
Éstos y otros cometidos, ventajas y características de la presente invención se publican a partir de la siguiente descripción detallada de formas de realización preferidas de la invención en combinación con el dibujo.
Breve descripción de los dibujos
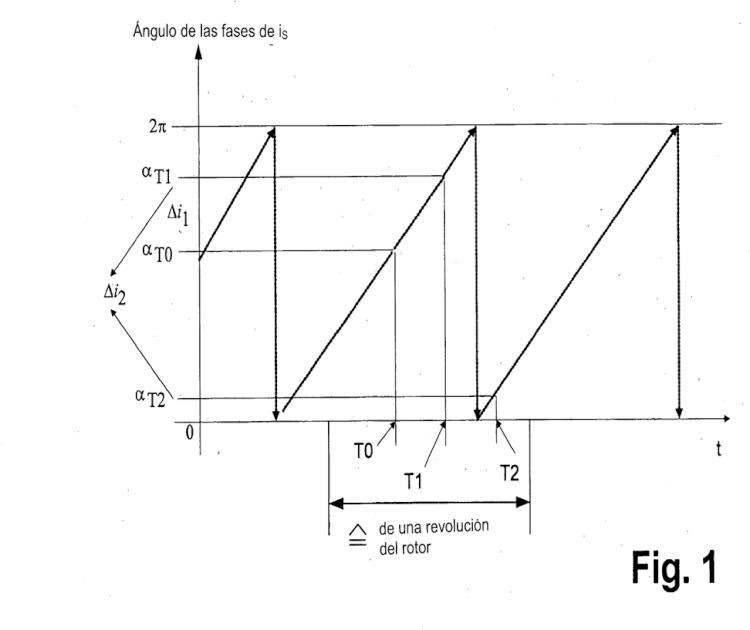
La figura 1 muestra una curva de tiempo del ángulo de las fases de la corriente del estator de la máquina eléctrica giratoria en el procedimiento de acuerdo con la invención.
En principio, en la figura las partes iguales están provistas con los mismos signos de referencia.
Modos de realización de la invención
En la figura 1 se representa una curva del tiempo del ángulo de las fases de la corriente del estator de la máquina eléctrica giratoria, que aparece en el procedimiento de acuerdo con la invención. La curva del ángulo de las fases de la corriente del estator va según la figura 1 de 0 a 2, luego comienza de nuevo en 0 y marcha hasta 2 y así sucesivamente. La máquina presenta un conjunto de arrollamiento del estator y un conjunto de arrollamiento del rotor, siendo alimentado el conjunto de arrollamiento del estator de acuerdo con el procedimiento por una unidad de conversión correspondiente. La máquina eléctrica giratoria está configurada típicamente como máquina síncrona o máquina asíncrona.
En el procedimiento de acuerdo con la invención se cortocircuita ahora el conjunto de arrollamiento del estator por medio de la unidad de conversión dentro de una revolución del rotor a una velocidad supuesta del rotor al menos en tres instantes de cortocircuito T0, T1, T2 predeterminables. En la figura 1 se representa a modo de ejemplo un intervalo de tiempo, que corresponde a una revolución del rotor a la velocidad supuesta del rotor. Dentro de esta revolución se cortocircuita entonces el conjunto de arrollamiento del estator por medio de la unidad de conversión en los al menos tres instantes de cortocircuito T0, T1, T2 predeterminables. En cada instante de cortocircuito T0, T1, T2 se calcula, como se indica en la figura 1, el ángulo de las fases T0, T1, T2 de la corriente respectiva del estator iST0, iST1, iST2. Con preferencia, se calcula la corriente respectiva del estator iST0, iST1, iST2 especialmente a través de medición, por ejemplo a través de sensores de corriente, de manera que se calculan la amplitud îST0, îST1, îST2 de la corriente respectiva del estator iST0, iST1, iST2 y el ángulo de las fases T0, T1, T2 de la corriente respectiva del estator iST0, iST1, iST2. A partir de los ángulos de las fases T0, T1, T2 calculados en dos instantes de cortocircuito T0, T1, T2 más próximos, respectivamente, en el tiempo entre sí, se forma un ángulo diferencial de las fases i1, i2. Las fórmulas correspondientes, con los tres ángulos de las fases T0, T1, T2 supuestos dentro de una revolución del rotor se expresan de la siguiente manera:
i1 = T1 -T0
i2 =T2 -T1
A partir de los ángulos diferenciales de las fases i1. i2 se calcula entonces, además, el ángulo diferencial mínimo de las fases imin, en particular a través de simple comparación de valores. En el caso de un ángulo diferencian mínimo negativo de las fases imin, se suma un ángulo de corrección de las fases ik al último ángulo calculado de las fases T2 y en el caso de un ángulo diferencial mínimo positivo de las fases imin, se resta el ángulo... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la determinación de la posición angular de rotor de una máquina eléctrica giratoria, cuya máquina presenta un con junto de arrollamiento del estator y un conjunto de arrollamiento del rotor, en el que el conjunto de arrollamiento del estator es alimentado por una unidad de conversión correspondiente, y el conjunto de arrollamiento del estator es cortocircuitado por medio de la unidad de conversión dentro de una revolución del rotor a una velocidad supuesta del rotor y en el instante del cortocircuito se calcula el ángulo de las fases de la corriente del estator, caracterizado porque el conjunto de arrollamiento del estator es cortocircuitado por medio de la unidad de conversión dentro de una revolución del rotor a una velocidad supuesta del rotor en al menos tres instantes de cortocircuito (T0, T1, T2) predeterminables, porque en cada instante de cortocircuito (T0, T1, T2), se calcula el ángulo de las fases (T0, T1, T2) de la corriente respectiva del estator (iST0, iST1, iST2), porque a partir de los ángulos de las fases (T0, T1, T2) calculados en cada caso en dos instantes de cortocircuito más próximos en el tiempo entre sí, se forma un ángulo diferencial de las fases (i1, i2), porque el ángulo diferencial mínimo de las fases (imin) se calcula a partir de los ángulos diferenciales de las fases (i1, i2), y porque en el caso de un ángulo diferencial mínimo negativo de las fases (imán), se suma un ángulo de corrección de las fases (iK) al último ángulo calculado de las fases y en el caso de un ángulo diferencial mínimo positivo de las fases (imin), se resta el ángulo de corrección de las fases (iK) del último ángulo calculado de las fases T2.
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque el ángulo de corrección de las fases (ik) es /2.
3. Procedimiento de acuerdo con la reivindicación 1 ó 2, caracterizado porque los instantes de cortocircuito (T0, T1, T2) dentro de una rotación del rotor a la velocidad supuesta del rotor están equidistantes.
4. Procedimiento de acuerdo con una de las reivindicaciones 1 a 3, caracterizado porque en cada instante de cortocircuito (T0, T1, T2) se calcula la amplitud (îST0, îST1, îST2) de la corriente respectiva del estator (iST0, iST1, iST2), porque cada amplitud (îST0, îST1, îST2) calculada dentro de un instante de supervisión predeterminable es supervisada con respecto a un valor umbral regulable de la amplitud, porque a partir de los ángulos de las fases (T0, T1, T2) calculados dentro de una revolución del rotor, se forma un ángulo diferencial total de las fases (i), porque el ángulo diferencial total de las fases (i) es supervisado con respecto a un valor umbral del ángulo diferencial total de las fases regulable, porque en el caso de que no se alcance el valor umbral de la amplitud regulable o en el caso de que no se alcance el valor umbral del ángulo diferencial total de las fases regulable, se reduce la velocidad supuesta del rotor.
Patentes similares o relacionadas:
Controlador, del 16 de Octubre de 2019, de Aeristech Control Technologies Limited: Un sistema de control para un motor o generador de imán permanente que incluye tres bobinados de fase individuales, bobinado de fase A, bobinado […]
Procedimiento de control implementado para controlar dos motores eléctricos síncronos de imán permanente conectados en paralelo, del 14 de Agosto de 2019, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Procedimiento de control implementado en un convertidor de potencia que comprende una salida conectada a dos motores (Mot1, Mot2) eléctricos […]
Circuito de control y procedimiento de regulación para máquina síncrona, del 10 de Julio de 2019, de SIRONA DENTAL SYSTEMS GMBH: Circuito de control para una máquina síncrona de una pieza de mano dental, que presenta una alimentación de tensión , caracterizado por que el circuito de control presenta […]
Máquina de trabajo agrícola, del 22 de Mayo de 2019, de PÖTTINGER Landtechnik GmbH: Máquina de trabajo agrícola en forma de un remolque autocargador que se puede montar en un tractor , con un recolector que está provisto de un […]
Sistema y método para monitorizar y controlar un motor eléctrico sin escobillas, del 26 de Abril de 2019, de Embraco Indústria de Compressores e Soluções em Refrigeração Ltda: Sistema para la monitorización y control de un motor sin escobillas, siendo el motor trifásico y asociable con una fuente de energía eléctrica por medio de un rectificador, […]
Freno de detención para vehículos de motor sobre raíles, del 3 de Abril de 2019, de Siemens Mobility GmbH: Vehículo de motor sobre raíles con un freno de detención, estando realizado el freno de detención por medio de al menos una máquina eléctrica , que presenta un rotor […]
Aparato de detección de la posición del polo magnético para máquinas síncronas, del 3 de Abril de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un aparato de detección de la posición del polo magnético para máquinas síncronas, que comprende: - un medio de circuito , para convertir […]
Compresor, del 25 de Febrero de 2019, de DAIKIN INDUSTRIES, LTD.: Un compresor que emplea CH2F2 (R32) como refrigerante único, o CH2F2 (R32) como refrigerante mixto rico en el que CH2F2 (R32) excede el 50 %, en el que el compresor […]