Procedimiento para controlar la fase de cierre de un embrague de un sistema de transmisión robotizado en un automóvil.
Procedimiento para controlar un embrague de automóvil en un sistema de transmisión robotizado,
en el seno deun vehículo que incluye un motor unido a un árbol primario a través de dicho embrague, en el quese traduce una solicitud del conductor sobre el pedal del acelerador en términos de velocidad de deslizamiento ωsl,definida por la diferencia entre un régimen del motor ωe y un régimen del árbol primario ωc.caracterizado por que:
- se definen unas restricciones sobre los actuadores del motor y del embrague para respetar sus límites defuncionamiento;
- se definen unas restricciones de confortabilidad para garantizar un confort durante la fase de acoplamientodel embrague;
- para respetar dichas restricciones de confortabilidad, se define una trayectoria de referencia de dichavelocidad de deslizamiento, definiendo para cada etapa del control, un valor de consigna refsl ω para dicha
velocidad de deslizamiento en función de un tiempo ωf N de acoplamiento del embrague;
- a partir de la expresión de dicha trayectoria de referencia, se define una expresión analítica que permitecalcular en tiempo real un conjunto de trayectorias de control de dicha velocidad de deslizamiento, por mediode una ley de control predictiva mediante un modelo con restricciones, denominado control CMPC;
- se selecciona entre el conjunto de dichas trayectorias de control, aquella que respeta las restricciones sobrelos actuadores por medio de una técnica de búsqueda dicotómica; y
- se controla dicho embrague por medio de dicha trayectoria de control seleccionada.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09290470.
Solicitante: IFP ENERGIES NOUVELLES.
Nacionalidad solicitante: Francia.
Dirección: 1 & 4 AVENUE DE BOIS-PREAU 92852 RUEIL MALMAISON CEDEX FRANCIA.
Inventor/es: ALAMIR, MAZEN, TONA,PAOLINO, AMARI,RACHID.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16D48/06 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16D ACOPLAMIENTOS PARA LA TRANSMISION DE MOVIMIENTOS DE ROTACION (transmisión para transmitir la rotación F16H, p. ej. transmisiones por fluidos F16H 39/00 - F16H 47/00 ); EMBRAGUES (embragues dinamo-eléctricos H02K 49/00; embragues que utilizan atracción electrostática H02N 13/00 ); FRENOS (sistemas de frenado electrodinámicos para vehículos, en general B60L 7/00; frenos dinamoeléctricos H02K 49/00). › F16D 48/00 Control externo de embragues. › Control por medios eléctricos o electrónicos, p. ej. de la presión de fluido.
- F16D48/08 F16D 48/00 […] › Regulación del ajuste del embrague en la puesta en marcha.
PDF original: ES-2414094_T3.pdf
Fragmento de la descripción:
Procedimiento para controlar la fase de cierre de un embrague de un sistema de transmisión robotizado en un automóvil 5 La presente invención se refiere al dominio de los sistemas de control automático de un motor de un vehículo.
En particular, la invención se refiere a un procedimiento para controlar la fase de cierre de un embrague de un sistema de transmisión robotizado en un automóvil.
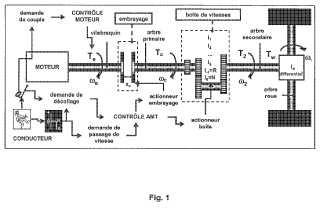
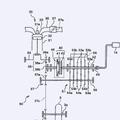
Los sistemas de transmisión robotizados, o sistemas de transmisión manual automática (AMT “Automated Manual Transmissions”) , constituyen una solución intermedia entre las transmisiones manuales clásicas y las transmisiones automáticas. A diferencia de estas últimas, caracterizadas por unos componentes mecánicos complejos tales como unos convertidores de par y unos trenes epicicloidales, las transmisiones robotizadas utilizan unos órganos (embrague, caja de velocidades) que tienen una mecánica tradicional, controlados, no por el conductor, sino por una o varias unidad (es) de control de a bordo. La figura 1 muestra un esquema genérico de transmisión robotizado. La figura 2 muestra un esquema conceptual de transmisión robotizada.
Todo sistema de control de una transmisión robotizada, incluida en una o varias ECU (Electronic Control Unit) , debe 20 generar unas consignas para:
-el regulador (eléctrico, neumático o hidráulico) de la posición del embrague (actuador del embrague) ;
-el regulador (eléctrico, neumático o hidráulico) de los engranajes de la caja de velocidades (actuadores de la 25 caja de velocidades) , que se traduce en el cambio de velocidad decidido por el conductor.
Así, en una transmisión robotizada, son las ECU dedicadas al control de la transmisión las que permite realizar las solicitudes del conductor (arranque y cambio de velocidades) , a través de los actuadores mencionados anteriormente, y esto en colaboración con la ECU de control motor, que determina el par producido por el motor.
El arranque es la maniobra que consiste en poner en movimiento un vehículo en la parada, movimiento obtenido transmitiendo una fracción cada vez más importante del par motor al árbol primario de transmisión, y por tanto a las ruedas, a través de un cierre progresivo del embrague. El embrague acopla (progresivamente después integralmente) el volante motor al árbol primario, transmitiendo de ese modo el par producido en el motor (neto sin los rozamientos del conjunto de cigüeñal motor) al árbol primario. En este esquema, el embrague puede por lo tanto estar:
-completamente abierto (desacoplado, desembragado) , con un par nulo transmitido al árbol primario;
-completamente cerrado (acoplado, embragado) , con el par motor integralmente transmitido al árbol primario;
-deslizante, en el camino de cerrarse o de abrirse. Es en la fase de deslizamiento para el cierre cuando se tiene la transmisión progresiva del par motor hacia al árbol primario.
En el caso de una transmisión manual clásica, el conductor realiza el cierre progresivo del embrague dosificando al mismo tiempo la presión ejercida sobre el pedal del embrague y la presión ejercida sobre el pedal acelerador. Su experiencia de conductor determinará el éxito de la maniobra, o bien su fracaso (calado del motor, sobrevelocidad, fuertes oscilaciones) . En el caso de una transmisión robotizada, el pedal de embrague está ausente, y es en el sistema de control de la transmisión donde se dosifica la acción del embrague, y donde se coordina con la 50 producción del par del motor para garantizar el buen desarrollo de la maniobra de arranque.
El cierre progresivo del embrague, y su coordinación con la producción del par motor, es por tanto la fase clave para el control de la transmisión robotizada. Para comprender el funcionamiento del grupo motopropulsor en esta fase, es necesario considerar que el par transmitido por el embrague (fracción del par motor) se ve como un par negativo del 55 lado del cigüeñal (se sustrae por tanto de un par neto proporcionado por el motor) y como un par positivo del lado de la transmisión aguas abajo del embrague. El resultado neto de las pérdidas transitorias y estáticas debidas a las elasticidades, a los rozamientos y a la eficacia de cada elemento mecánico. Es este par el que, desmultiplicado por la relación de la caja, se transmite a la ruedas. El estado del grupo motopropulsor se define entonces por unas variables medidas aguas arriba y abajo del embrague: típicamente, el régimen motor aguas arriba, siempre 60 disponible en el vehículo, más (al menos) una medida de la velocidad aguas abajo del embrague: velocidad del árbol primario, del árbol secundario o velocidad de la ruedas. Estas variables no se miden sistemáticamente en un vehículo de serie, pero deben serlo en un vehículo equipado con una transmisión robotizada.
Estado de la técnica Para realizar las dos funciones principales del sistema de transmisión robotizado, arranque y cambio de velocidades, los sistemas de control de los vehículos de serie calculan generalmente la consigna del actuador del embrague a partir de tablas (cartografías) previamente rellenadas, en función del par solicitado por el conductor (posición del pedal acelerador) , del régimen motor, del régimen del árbol primario (u otra velocidad del lado de la transmisión) y otros parámetros, tales como la relación de la caja (en el caso de cambio de velocidades) .
Del lado del control motor, es necesario asegurar que el régimen motor permanece compatible con la maniobra considerada, a pesar del par negativo que actúa sobre el cigüeñal (es necesario por lo tanto que el control motor incremente el par motor en consecuencia) . Desde un punto de vista sistemático, este tipo de estructura de control no es otra más que un caso particular de la estructura general de la figura 3. Este esquema subraya que en el control de la fase de deslizamiento del embrague, se dispone de dos “palancas”: el par motor que actúa solamente sobre el cigüeñal, y el par transmitido por el embrague que actúa la vez sobre el cigüeñal (como par negativo) y sobre la parte aguas abajo de la transmisión hasta las ruedas. Se trata, para el sistema de control, y utilizando la terminología de los Automatismos, de dos actuadores que actúan en la entrada del sistema del grupo motopropulsor. Para conocer el estado del sistema, y actuar en consecuencia, es necesario medir al menos dos salidas, el régimen motor y una de las velocidades aguas abajo del embrague, por ejemplo, el régimen del árbol primario. Las entradas del sistema del grupo motopropulsor, es decir los pares motor y de embrague, no se miden jamás en un vehículo de serie, sino solamente se estiman, y con muchas imprecisiones.
Este control por cartografía, típico de los vehículos de serie, no permite traducir fácilmente las especificaciones a respetar durante el cierre del embrague: realización de las solicitudes del conductor, confort, mantenimiento del funcionamiento correcto del grupo motopropulsor. Además, requiere un largo trabajo de calibración para rellenar las cartografías.
Para superar unos métodos basados en unas cartografías, se conocen unas soluciones basadas en unas leyes de mando, o leyes de control, inspiradas en los principios de los Automatismos. Estas leyes no se basan solamente en unas tablas rellenadas previamente. Estas soluciones se basan en unos algoritmos que calculan las entradas a enviar hacia el sistema del grupo motopropulsor, par motor y par de embrague, a partir de medidas del estado de este sistema (típicamente el régimen motor y el régimen del árbol primario) , concebidos utilizando el principio de retroalimentación (feedback) .
Para que sean utilizables en el marco del control del motor de un vehículo, estas leyes de mando por realimentación deben permitir satisfacer un cierto número de especificaciones: el respeto de las restricciones que garantizan un funcionamiento correcto del motor térmico, el respeto de las restricciones que garantizan el confort en el acoplamiento del embrague (ninguna oscilación) , y el respeto de la voluntad del conductor. Un procedimiento de acuerdo con el preámbulo de la reivindicación 1 se conoce por el documento EP-A-1 072 459.
O, estas técnicas no pueden gestionar explícitamente estas restricciones, es decir asegurarse que una o varias variables del sistema a controlar (entradas, salidas o estado) , o sus derivadas, no sobrepasan ciertos límites fijados como especificaciones.
Así, el objetivo de la invención es un procedimiento alternativo para controlar en tiempo real un embrague de un 45 automóvil en un sistema de transmisión robotizado, por medio de una ley de mando que permita superar los problemas de las técnicas anteriores. Para... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para controlar un embrague de automóvil en un sistema de transmisión robotizado, en el seno de un vehículo que incluye un motor unido a un árbol primario a través de dicho embrague, en el que se traduce una solicitud del conductor sobre el pedal del acelerador en términos de velocidad de deslizamiento !sl, definida por la diferencia entre un régimen del motor !e y un régimen del árbol primario !c. caracterizado por que:
-se definen unas restricciones sobre los actuadores del motor y del embrague para respetar sus límites de
funcionamiento; -se definen unas restricciones de confortabilidad para garantizar un confort durante la fase de acoplamiento del embrague; -para respetar dichas restricciones de confortabilidad, se define una trayectoria de referencia de dicha velocidad de deslizamiento, definiendo para cada etapa del control, un valor de consigna !slref para dicha velocidad de deslizamiento en función de un tiempo Nf ∀ de acoplamiento del embrague; -a partir de la expresión de dicha trayectoria de referencia, se define una expresión analítica que permite calcular en tiempo real un conjunto de trayectorias de control de dicha velocidad de deslizamiento, por medio de una ley de control predictiva mediante un modelo con restricciones, denominado control CMPC; -se selecciona entre el conjunto de dichas trayectorias de control, aquella que respeta las restricciones sobre 20 los actuadores por medio de una técnica de búsqueda dicotómica; y -se controla dicho embrague por medio de dicha trayectoria de control seleccionada.
2. Procedimiento de acuerdo con la reivindicación 1, en el que se definen dichas restricciones sobre dichos actuadores imponiendo unos valores mínimos y máximos al par motor y al par de embrague, así como unos valores 25 mínimos y máximos a las derivadas de estos pares.
3. Procedimiento de acuerdo con una de las reivindicaciones precedentes, en el que se definen dichas restricciones de la confortabilidad imponiendo que la velocidad de deslizamiento y su derivada sean nulas durante la fase de acoplamiento del embrague.
4. Procedimiento de acuerdo con una de las reivindicaciones precedentes, en el que la consigna !slref se define para cada etapa de control k por:
∋i , ..., Np % 1∃
∀
ref 1% i Nf k
!sl (k , 1) − !sl
∀
(1, ∗+ iN )
f
con: -Np es un entero que define un horizonte de predicción.
40. ∗ es un parámetro a calibrar.
5. Procedimiento de acuerdo con la reivindicación 4, en el que el parámetro ∗ se elige de manera que el acoplamiento tenga lugar con una derivada de la velocidad de deslizamiento casi nula.
6. Procedimiento de acuerdo con una de las reivindicaciones precedentes, en el que se genera una segunda consigna !slref para el régimen motor definida por:
ref 0 %1 d
!− max#! , T (T (X , ! ) ) ∃
sl e e pedale 50 en la que:
-!e 0 es una consigna constante de ralentí;
-T es un par máximo en función del régimen !e -Ted es un par motor solicitado por el conductor.
55. XPedal es una posición del pedal del acelerador.
Patentes similares o relacionadas:
Sistema de control de embrague, del 3 de Junio de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un sistema de control de embrague dispuesto para controlar un embrague interpuesto en un recorrido de transmisión de potencia desde un motor […]
 Sistema y método para acoplamiento electromecánico selectivo y/o desacoplamiento de un alternador automotriz, del 25 de Diciembre de 2019, de FCA Fiat Chrysler Automóveis Brasil Ltda: Un sistema inteligente para un acoplamiento y/o desacoplamiento electromecánico selectivo del alternador automotriz, del tipo que se aplicará […]
Sistema y método para acoplamiento electromecánico selectivo y/o desacoplamiento de un alternador automotriz, del 25 de Diciembre de 2019, de FCA Fiat Chrysler Automóveis Brasil Ltda: Un sistema inteligente para un acoplamiento y/o desacoplamiento electromecánico selectivo del alternador automotriz, del tipo que se aplicará […]
 Método de control de embrague de vehículo, del 25 de Septiembre de 2019, de Consortium De Recherche BRP - Université De Sherbrooke S.E.N.C: Un vehículo que comprende:
un motor que tiene un cigüeñal ;
un embrague de múltiples placas controlado hidráulicamente conectado […]
Método de control de embrague de vehículo, del 25 de Septiembre de 2019, de Consortium De Recherche BRP - Université De Sherbrooke S.E.N.C: Un vehículo que comprende:
un motor que tiene un cigüeñal ;
un embrague de múltiples placas controlado hidráulicamente conectado […]
 Dispositivo de árbol giratorio, del 25 de Septiembre de 2019, de PIAGGIO & C. S.P.A.: Un dispositivo de árbol giratorio que comprende un cárter fijo y medios de accionamiento integrales con al menos uno entre uno o más árboles giratorios […]
Dispositivo de árbol giratorio, del 25 de Septiembre de 2019, de PIAGGIO & C. S.P.A.: Un dispositivo de árbol giratorio que comprende un cárter fijo y medios de accionamiento integrales con al menos uno entre uno o más árboles giratorios […]
Embrague con controlador de embrague, método de control de embrague, y vehículo del tipo de montar a horcajadas, del 22 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Embrague que tiene un controlador de embrague configurado para controlar un estado de enganche del embrague accionando un accionador , incluyendo: […]
Método y aparato para controlar la velocidad de rotación de un ventilador del circuito de refrigeración de motor en un vehículo, del 15 de Mayo de 2019, de IVECO S.P.A.: Método para controlar la velocidad de rotación de un ventilador de un circuito de refrigeración de motor en un vehículo, que comprende las etapas […]
 Vehículo, del 20 de Junio de 2018, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Vehículo que tiene un motor y un embrague dispuestos en un recorrido de transmisión de par, incluyendo un controlador de embrague :
[…]
Vehículo, del 20 de Junio de 2018, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Vehículo que tiene un motor y un embrague dispuestos en un recorrido de transmisión de par, incluyendo un controlador de embrague :
[…]
Dispositivo para accionar hidráulicamente un embrague de fricción de vehículo a motor, del 7 de Diciembre de 2016, de FTE AUTOMOTIVE GMBH: Dispositivo para el accionamiento hidráulico de un embrague de fricción de vehículo a motor con un cilindro maestro que puede accionarse […]