GUÍA ACOPLABLE DE ENCLAVAMIENTO MUTUO MECÁNICO DE DEVANADOS HELICOIDALES Y ESTRUCTURA DE AVANCE.
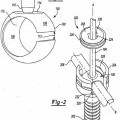
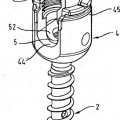
Un implante médico (10) que tiene un miembro receptor abierto (15) con una pareja de brazos separados (18) y un miembro (11) de cierre que tiene un eje (42) de rotación para cerrar los brazos 18 del miembro receptor;
comprendiendo dicho implante además: a) una primera y una segunda formas (2, 3) de enclavamiento mutuo devanadas helicoidalmente y acoplables; estando dicha primera forma (2) de enclavamiento mutuo montada sobre una superficie exterior de dicho miembro de cierre; b) estando montada dicha segunda forma (3) de enclavamiento mutuo sobre una superficie interior de dicho miembro receptor; donde dicha primera y segunda formas de enclavamiento mutuo se extienden alrededor del miembro de cierre o del miembro receptor en al menos una vuelta, de manera que dichas formas son giratorias una con respecto a la otra, alrededor de dicho eje, para permitir el avance de dicho miembro de cierre en dicho miembro receptor cuando se montan; y donde c) dichas formas de enclavamiento mutuo resisten operativamente el ensanchamiento radial de dichos brazos durante el montaje y uso subsiguiente de dicho implante, comprendiendo además dicho implante: una primera superficie (4) que se extiende a lo largo de una respectiva forma de enclavamiento mutuo y está adaptada para acoplarse y enclavarse radialmente con una segunda superficie complementaria (5) de la otra forma de enclavamiento mutuo al girar conjuntamente dichos miembros alrededor de dicho eje para resistir, mediante el acoplamiento de dicha primera superficie con dicha segunda superficie, el ensanchamiento radial de dichos brazos del miembro receptor durante el montaje de dicho miembro de cierre en dicho miembro receptor y donde dicha primera forma de enclavamiento mutuo tiene una primera parte (59) de agarre y dicha segunda forma de enclavamiento mutuo tiene una segunda parte (60) de agarre, donde dicha primera forma (2) de enclavamiento mutuo incluye una primera raíz (45) y una primera cresta (47) que se extiende helicoidalmente alrededor de dicha forma de enclavamiento mutuo para formar de manera alternada una primera raíz y una primera cresta, teniendo dicha primera cresta un radio mayor que dicha primera raíz; incluyendo dicha primera parte (59) de agarre un resalte (72) de agarre que se proyecta desde dicha primera superficie en una dirección sustancialmente paralela a dicho eje o un canal de agarre formado en dicha primera superficie en dicha dirección; incluyendo dicha segunda forma (3) de enclavamiento mutuo una segunda raíz (49) y una segunda cresta (51) que se extiende helicoidalmente alrededor de dicha forma de enclavamiento mutuo para formar alternadamente una segunda raíz y una segunda cresta; teniendo dicha segunda raíz un radio mayor que el de dicha segunda cresta; incluyendo dicha segunda parte (60) de agarre un canal (74) de agarre formado en dicha segunda superficie o, respectivamente, un resalte de agarre que se proyecta desde dicha segunda superficie en una dirección sustancialmente paralela a dicho eje; estando posicionado generalmente dicho canal de agarre para acoplarse con dicho resalte de agarre durante el montaje de dicho miembro de cierre en dicho miembro receptor; donde el resalte de agarre está posicionado en un lugar separado de la raíz de la forma de enclavamiento mutuo desde la cual se proyecta
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2003/010310.
Solicitante: JACKSON, ROGER P.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: SUITE 600 2750 CLAY EDWARDS DRIVE NORTH KANSAS CITY, MO 64116 ESTADOS UNIDOS DE AMERICA.
Inventor/es: JACKSON,ROGER P.
Fecha de Publicación: .
Fecha Solicitud PCT: 4 de Abril de 2003.
Clasificación Internacional de Patentes:
- A61B17/70B2
- F16B35/04B2H
Clasificación PCT:
- A61B17/56 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Instrumentos o procedimientos quirúrgicos para el tratamiento de los huesos o articulaciones; Dispositivos especialmente adaptados al efecto.
- F16B35/04 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16B DISPOSITIVOS PARA UNIR O BLOQUEAR LOS ELEMENTOS CONSTRUCTIVOS O LAS PARTES DE LAS MAQUINAS, p. ej. CLAVOS, CLAVIJAS, TUERCAS, TORNILLOS, BULONES, ANILLOS QUE FORMAN RESORTE, ABRAZADERAS, BRIDAS, GRAPAS, CUÑAS; UNIONES O ARTICULACIONES (acoplamientos para la transmisión de mecanismos de rotación F16D). › F16B 35/00 Bulones roscados; Bulones de anclaje; Pasadores roscados; Tornillos; Tornillos de presión Screw-bolts (clavijas para paredes F16B 13/00; tornillo que practican la rosca F16B 25/00). › con una cabeza o un eje de forma particular que permite fijar el bulón sobre o en un objeto (fijación del bulón para impedir su rotación en el objeto para el empleo de piezas accesorias F16B 39/00).
Clasificación antigua:
- A61B17/56 A61B 17/00 […] › Instrumentos o procedimientos quirúrgicos para el tratamiento de los huesos o articulaciones; Dispositivos especialmente adaptados al efecto.
- F16B35/04 F16B 35/00 […] › con una cabeza o un eje de forma particular que permite fijar el bulón sobre o en un objeto (fijación del bulón para impedir su rotación en el objeto para el empleo de piezas accesorias F16B 39/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2360494_T3.pdf
Fragmento de la descripción:
Antecedentes de la invención
La presente invención está dirigida a una estructura para uso en el enclavamiento mutuo de dos elementos y, en particular, a una estructura para unir conjuntamente partes de un implante médico. La estructura incluye una primera forma de enclavamiento mutuo sobre un cierre y una segunda forma de enclavamiento mutuo acoplable sobre un receptor. El cierre está operativamente girado en el receptor. La primera y segunda formas de enclavamiento mutuo están ambas helicoidalmente devanadas, de manera que la primera forma de enclavamiento mutuo avanza con respecto a la segunda forma de enclavamiento mutuo, cuando se inserta el cierre con la primera forma de enclavamiento en el receptor y se gira. Al menos una de las primera y segunda formas de enclavamiento mutuo incluye un saliente que se solapa y enclava radialmente con la otra forma de enclavamiento mutuo cuando las dos formas están acopladas.
Los implantes médicos presentan diversos problemas a los cirujanos que instalan los implantes y a los ingenieros que los diseñan. Siempre es deseable disponer de un implante que sea fuerte y difícil de fallar o romperse durante el uso. También es deseable que el implante sea tan pequeño y ligero como sea posible, de manera que sea menos intrusivo en el paciente. Estos son normalmente objetivos en conflicto, y a menudo difíciles de resolver.
Un tipo particular de implante presenta problemas especiales. En particular, los tornillos de los huesos de la espina dorsal, los ganchos, etc., se usan en muchos tipos de cirugía de la espalda para reparar heridas, enfermedades o defectos congénitos. Por ejemplo, los tornillos de los huesos de la espina dorsal de este tipo están diseñados para tener un extremo que se inserta con rosca en una vértebra y una cabeza en el extremo opuesto del mismo. La cabeza está diseñada para recibir un vástago o miembro similar a un vástago en un canal de la cabeza, donde el vástago es capturado en el canal y enclavado en la cabeza para impedir el movimiento relativo entre los diversos elementos después de la instalación.
Hay dos tipos diferentes principales de tornillos para los huesos y dispositivos similares que se clasifican como de cabeza cerrada y de cabeza abierta. Aunque los dispositivos de cabeza cerrada son altamente eficaces para capturar y fijar el vástago, como el vástago está roscado a través de una abertura de la cabeza, es muy difícil durante la cirugía roscar el vástago a través de las cabezas. Esto es debido a que hay muchas cabezas y el vástago está curvado o las cabezas no están alineadas. Consecuentemente, cuantas más cabezas de tornillo deba atravesar el vástago, más difícil es roscar el vástago en ellas.
El segundo tipo de cabeza es una cabeza abierta, donde hay formado un canal en la cabeza y el vástago es simplemente colocado en un canal abierto. El canal es cerrado después con un miembro de cierre. Los tornillos de huesos con cabeza abierta y los dispositivos relacionados son mucho más fáciles de usar y en algunas situaciones deben ser usados en lugar de los dispositivos de cabeza cerrada.
Aunque los dispositivos de cabeza abierta son a menudo necesarios y a menudo preferidos para el uso, hay un significativo problema asociado con ellos. En particular, los dispositivos de cabeza abierta tienen convencionalmente dos brazos verticales que están en lados opuestos de un canal que recibe el miembro de vástago. La parte superior del canal está cerrada por un miembro de cierre después de que el miembro de vástago se ha colocado en el canal. El cierre puede ser de un tipo deslizante, pero éste no es fácil de usar. A veces se utilizan tuercas roscadas que van alrededor del exterior de los brazos. Tales tuercas impiden el ensanchamiento de los brazos, pero las tuercas aumentan sustancialmente el tamaño y el perfil del implante, lo cual no es deseable. Muchos implantes de cabeza abierta están cerrados por tapones que se atornillan en las roscas entre los brazos, porque éstos tienen un perfil bajo. Sin embargo, los tapones roscados han encontrado problemas también en cuanto que producen fuerzas radiales hacia fuera que conducen al ensanche de los brazos o al menos no impiden el ensanche que a su vez afloja el implante. En particular, con el fin de enclavar el miembro de vástago en su sitio, se debe ejercer una fuerza significativa sobre un tapón o tornillo relativamente pequeño. Se requieren las fuerzas para proporcionar un par suficiente que asegure que el miembro de vástago quede fijado o enclavado en su sitio con respecto al tornillo del hueso, de manera que el vástago no se desplace axialmente o giratoriamente en él. Esto requiere típicamente pares del orden de 100 pulgada-libras (11,2984137 metro-Newton).
Debido a que los implantes de cabeza abierta tales como los tornillo, ganchos y similares para huesos son relativamente pequeños, los brazos que se extienden hacia arriba en la cabeza pueden doblarse fácilmente por fuerzas dirigidas radialmente hacia fuera, debidas a la aplicación de fuerzas sustanciales requeridas para enclavar el miembro de vástago. Históricamente, los cierres anteriores eran simples tapones que eran tratados con roscas en forma de V y que se atornillaban en roscas antagonistas en el interior de cada uno de los brazos. Pero, como se ha indicado anteriormente, los tapones convencionales con roscados en forma de V tienden a ensanchar o empujar los brazos radialmente hacia fuera al aplicarse una cantidad significativa de par, que termina doblando los brazos suficientemente para permitir que las roscas se aflojen o se desenganchen y falle el cierre. Para contrarrestar esto, se aplicaron diversas técnicas de ingeniería para permitir que la cabeza resista la fuerza de dispersión. Por ejemplo, los brazos fueron significativamente reforzados aumentando la anchura de los brazos muchas veces. Esto tenía el desafortunado efecto de aumentar sustancialmente el peso y el perfil del implante, lo cual no era deseable.
Muchos dispositivos de la técnica anterior han intentado también proporcionar anillos externos o algún otro tipo de estructura alrededor del exterior de los brazos, para mantener mejor los brazos en su sitio mientras que se instala el tapón central y de ahí en adelante. Esta estructura adicional puede originar la reducción de la fuerza de bloqueo del tapón contra el vástago, lo cual no es deseable, especialmente cuando la estructura adicional está parcialmente situada por debajo del tapón. Además, los elementos adicionales son desfavorables desde un punto de vista de los implantes, ya que es típicamente deseable mantener el número de piezas asociadas con los implantes en un mínimo y, como se ha indicado anteriormente, mantener el perfil en su mínimo posible.
Otros diseñadores han intentado resolver el problema del ensanchamiento proporcionando un cierre con una pareja de cuñas o pestañas opuestas que se extienden radialmente, y que tienen una estructura acoplable en los brazos del implante. Tales dispositivos sirven como cierre y resisten en cierta medida el ensanchamiento de los brazos, pero son a menudo difíciles de utilizar. En particular, los vástagos tienen normalmente algo de curvatura, ya que los vástagos se doblan para seguir la curvatura de la espina dorsal y normalmente se arquean con respecto a la parte inferior del canal del tornillo del hueso que recibe tal vástago. El vástago llena así gran parte del canal y debe quedar “sin doblar” para descansar sobre la parte inferior del canal y ser mantenido con seguridad en su sitio. Por tanto, el vástago está preferiblemente comprimido por el tapón y sin doblar por el avance del tapón en el canal, con el fin de asumir que el tapón sujetará con seguridad al vástago y que el vástago y el tapón no se aflojarán cuando se ponen sobre el vástago fuerzas posteriores al montaje. Debido a que se necesita una fuerza sustancial para enderezar el vástago, es difícil tanto colocar el tapón totalmente en el canal como girarlo para enclavarlo, mientras que se intenta también alinear las cuñas con la estructura acoplable. Es mucho más fácil alinear la estructura acoplable con el tapón con la estructura de los brazos en la parte superior de los brazos y después girar el tapón para atornillarlo en el receptor del tapón para hacer avanzar el tapón hacia el vástago. De esta manera, el tapón comienza a aplicar una fuerza significativa contra el vástago, pero después de que las piezas de la estructura acoplable hayan sido unidas al menos parcialmente, en cuyo momento se puede aplicar el par sin tener que preocuparse por la alineación. Se observa que donde se utilizan cuñas, la sección transversal de la... [Seguir leyendo]
Reivindicaciones:
1. Un implante médico (10) que tiene un miembro receptor abierto (15) con una pareja de brazos separados (18) y un miembro (11) de cierre que tiene un eje (42) de rotación para cerrar los brazos 18 del miembro receptor; comprendiendo dicho implante además:
a) una primera y una segunda formas (2, 3) de enclavamiento mutuo devanadas helicoidalmente y acoplables; estando dicha primera forma (2) de enclavamiento mutuo montada sobre una superficie exterior de dicho miembro de cierre;
b) estando montada dicha segunda forma (3) de enclavamiento mutuo sobre una superficie interior de dicho miembro receptor; donde dicha primera y segunda formas de enclavamiento mutuo se extienden alrededor del miembro de cierre o del miembro receptor en al menos una vuelta, de manera que dichas formas son giratorias una con respecto a la otra, alrededor de dicho eje, para permitir el avance de dicho miembro de cierre en dicho miembro receptor cuando se montan; y donde
c) dichas formas de enclavamiento mutuo resisten operativamente el ensanchamiento radial de dichos brazos durante el montaje y uso subsiguiente de dicho implante, comprendiendo además dicho implante:
una primera superficie (4) que se extiende a lo largo de una respectiva forma de enclavamiento mutuo y está adaptada para acoplarse y enclavarse radialmente con una segunda superficie complementaria (5) de la otra forma de enclavamiento mutuo al girar conjuntamente dichos miembros alrededor de dicho eje para resistir, mediante el acoplamiento de dicha primera superficie con dicha segunda superficie, el ensanchamiento radial de dichos brazos del miembro receptor durante el montaje de dicho miembro de cierre en dicho miembro receptor y
donde dicha primera forma de enclavamiento mutuo tiene una primera parte (59) de agarre y dicha segunda forma de enclavamiento mutuo tiene una segunda parte (60) de agarre, donde dicha primera forma (2) de enclavamiento mutuo incluye una primera raíz (45) y una primera cresta (47) que se extiende helicoidalmente alrededor de dicha forma de enclavamiento mutuo para formar de manera alternada una primera raíz y una primera cresta, teniendo dicha primera cresta un radio mayor que dicha primera raíz;
incluyendo dicha primera parte (59) de agarre un resalte (72) de agarre que se proyecta desde dicha primera superficie en una dirección sustancialmente paralela a dicho eje o un canal de agarre formado en dicha primera superficie en dicha dirección;
incluyendo dicha segunda forma (3) de enclavamiento mutuo una segunda raíz (49) y una segunda cresta
(51) que se extiende helicoidalmente alrededor de dicha forma de enclavamiento mutuo para formar alternadamente una segunda raíz y una segunda cresta; teniendo dicha segunda raíz un radio mayor que el de dicha segunda cresta;
incluyendo dicha segunda parte (60) de agarre un canal (74) de agarre formado en dicha segunda superficie o, respectivamente, un resalte de agarre que se proyecta desde dicha segunda superficie en una dirección sustancialmente paralela a dicho eje;
estando posicionado generalmente dicho canal de agarre para acoplarse con dicho resalte de agarre durante el montaje de dicho miembro de cierre en dicho miembro receptor;
donde el resalte de agarre está posicionado en un lugar separado de la raíz de la forma de enclavamiento mutuo desde la cual se proyecta.
2. El implante como se reivindica en la reivindicación 1, en el que dicha primera (4) y segunda (5) superficies son sustancialmente perpendiculares al eje (42).
3. El implante como se reivindica en la reivindicación 1, en el que dicha primera (4) y segunda (5) superficies están anguladas con respecto al eje (42), de manera que forman una pendiente hacia abajo o hacia arriba a medida que la superficie se extiende radialmente hacia fuera.
4. El implante como se reivindica en la reivindicación 1, en el que el resalte (72) de agarre y el canal (74) de agarre son redondeados, triangulares, cuadrados o semicirculares en su sección transversal.
Patentes similares o relacionadas:
DISPOSITIVO DE ANCLAJE ÓSEO, del 8 de Febrero de 2012, de BIEDERMANN MOTECH GMBH: Dispositivo de anclaje óseo con: un vástago para anclar en un hueso o en una vértebra, una cabeza y una parte de recepción que recibe la […]
DISPOSITIVO DE ANCLAJE PARA ANCLAR UNA VARILLA EN UN HUESO O VÉRTEBRA, del 7 de Febrero de 2012, de BIEDERMANN MOTECH GMBH: Sistema para estabilizar la columna vertebral, consistente en un dispositivo de anclaje para anclar una varilla en un hueso o una vértebra y al menos […]
ELEMENTO DE ANCLAJE ÓSEO, del 9 de Enero de 2012, de BIEDERMANN MOTECH GMBH: Dispositivo de estabilización dinámica de huesos o vértebras que comprende al menos dos elementos de anclaje óseo y al menos dos elementos de conexión […]
IMPLANTE ESPINAL, del 5 de Diciembre de 2011, de ZIMMER SPINE: Implante espinal que comprende en un primer extremo medios de fijación a una vértebra y en su segundo extremo una cabeza de […]
 DISPOSITIVO DE FIJACIÓN ESPINAL, del 7 de Junio de 2011, de EBI, LLC: Un dispositivo de cerramiento para la conexión de un dispositivo de fijación pedicular con un elemento de fijación espinal alargado, el dispositivo […]
DISPOSITIVO DE FIJACIÓN ESPINAL, del 7 de Junio de 2011, de EBI, LLC: Un dispositivo de cerramiento para la conexión de un dispositivo de fijación pedicular con un elemento de fijación espinal alargado, el dispositivo […]
 LAVADORA, del 6 de Junio de 2011, de LG ELECTRONICS INC.: Una lavadora que comprende: una envolvente exterior ; una cuba de lavado dispuesta en el mueble o envolvente ; una cuba o tambor giratorio que es […]
LAVADORA, del 6 de Junio de 2011, de LG ELECTRONICS INC.: Una lavadora que comprende: una envolvente exterior ; una cuba de lavado dispuesta en el mueble o envolvente ; una cuba o tambor giratorio que es […]
 DISPOSITIVO DE ANCLAJE ÓSEO, del 27 de Mayo de 2011, de BIEDERMANN MOTECH GMBH: Sistema modular que comprende: un dispositivo de anclaje óseo con un vástago para anclarlo en un hueso o en una vértebra, una cabeza (3, 103, […]
DISPOSITIVO DE ANCLAJE ÓSEO, del 27 de Mayo de 2011, de BIEDERMANN MOTECH GMBH: Sistema modular que comprende: un dispositivo de anclaje óseo con un vástago para anclarlo en un hueso o en una vértebra, una cabeza (3, 103, […]
UTILIZACIÓN DE UNA PORCIÓN DE GUÍA EN UN PERNO, del 1 de Diciembre de 2011, de AOYAMA SEISAKUSHO CO., LTD.: Utilización de una porción de guía que tiene una configuración de dirección de tornillo invertido en un perno , para un procedimiento para ensamblar […]