DISPOSITIVO PARA CONTROLAR LA ESTABILIDAD DINAMICA DE UN VEHICULO INDUSTRIAL.
Vehículo industrial que comprende un dispositivo (30) para controlar la estabilidad dinámica de dicho vehículo,
en el que el chasis de dicho vehículo está equipado con por lo menos un par de ejes (10'', 10''''), comprendiendo cada uno unos brazos de suspensión (12, 13, 12'', 13''), comprendiendo el extremo distal de cada brazo de suspensión unos pivotes de dirección articulados (14, 15, 14'' 15'') para las ruedas de dicho vehículo, y en el que interpuestos entre el eje (10'',10'''') y el chasis (16) de dicho vehículo industrial están previstos unos cilindros hidráulicos (17, 17'', 18, 18''), comprendiendo dicho dispositivo de control (30) una pluralidad de transductores de presión (31-34) capaces de indicar las cargas que soporta en cada momento cada cubo de rueda y conectados a una unidad de control (39), en el que cada uno de dichos cilindros hidráulicos (17, 17'', 18, 18'') está asociado con un respectivo transductor de presión de dicha pluralidad de transductores de presión (31-34) para detectar y proporcionar en tiempo real a la unidad de control (39) unos datos de entrada en los que basar la evaluación de la estabilidad del vehículo, permitiendo de este modo mediante un procesamiento de datos adecuado, reconocer las condiciones de estabilidad de dicho vehículo, en el que dicho dispositivo de control (30) comprende además un bloque de memoria (40) conectado a dicha unidad de control (39), comprendiendo dicho bloque de memoria (40) unos datos de vehículo de dicho vehículo, caracterizado porque dicha unidad de control (39) procesa una señal relevante para las condiciones de estabilidad de dicho vehículo a través de un proceso de autoaprendizaje que tiene en cuenta dichos datos de vehículo que pueden almacenarse en el dispositivo (30) en el momento en el que el vehículo sale de la cadena de montaje
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E01202450.
Solicitante: DANA ITALIA S.P.A.
Nacionalidad solicitante: Italia.
Dirección: LOC.LINFANO, ZONA INDUSTRIALE,38062 ARCO (TRENTO).
Inventor/es: PANIZZOLO, FABRIZIO.
Fecha de Publicación: .
Fecha Solicitud PCT: 26 de Junio de 2001.
Fecha Concesión Europea: 24 de Febrero de 2010.
Clasificación Internacional de Patentes:
- B60G17/015 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60G SUSPENSION DE VEHICULOS (vehículos de colchón de aire B60V; montajes entre el chasis y el cuerpo del vehículo B62D 24/00). › B60G 17/00 Suspensiones elásticas que permiten ajustar las características de los muelles o de los amortiguadores de vibraciones, regular la distancia entre la superficie portante y la parte suspendida del vehículo o bloquear la suspensión durante la utilización para adaptarse a las condiciones variables del vehículo o del terreno, p. ej. en función de la velocidad o de la carga. › comportando los medios de reglaje elementos eléctricos o electrónicos (B60G 17/005 tienen prioridad).
- B60G9/02 B60G […] › B60G 9/00 Suspensiones elásticas de un eje rígido o de un cárter de eje para dos o más ruedas. › el eje o el cárter siendo montados con gorrón sobre el vehículo.
- B62D49/08 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 49/00 Tractores (de tipo acompañado de pie B62D 51/04; características de orugas B62D 55/00). › que tienen medios para impedir la vuelta o el basculamiento (dispositivos de seguridad para el control de los conjuntos de propulsión especialmente adaptados a los vehículos o dispuestos en ellos B60K 28/00).
- B66C23/90B
- B66F17/00B
- B66F9/075 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › Características o detalles de estructura.
- E02F9/22V
- E02F9/24 CONSTRUCCIONES FIJAS. › E02 HIDRAULICA; CIMENTACIONES; MOVIMIENTO DE TIERRAS. › E02F DRAGADO; MOVIMIENTO DE TIERRAS (extracción de turba E21C 49/00). › E02F 9/00 Elementos constitutivos de las dragas o de los ingenios para el movimiento de tierras, no limitados a una de las categorías cubiertas por los grupos E02F 3/00 - E02F 7/00 (dispositivos de colocación o de recogida de cables eléctricos de arrastre B66C). › Dispositivos de seguridad.
Clasificación PCT:
- B60G17/015 B60G 17/00 […] › comportando los medios de reglaje elementos eléctricos o electrónicos (B60G 17/005 tienen prioridad).
- B62D49/08 B62D 49/00 […] › que tienen medios para impedir la vuelta o el basculamiento (dispositivos de seguridad para el control de los conjuntos de propulsión especialmente adaptados a los vehículos o dispuestos en ellos B60K 28/00).
- B66C23/90 B66 […] › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 23/00 Grúas que constan esencialmente de una viga, aguilón o una estructura triangular que actúan como brazo de palanca, montadas de forma que permitan movimientos de traslación o de orientación en planos verticales u horizontales, o bien una combinación de esos movimientos, p. ej. grúas de aguilón, derricks o grúas sobre torres (estructuras de torres que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00). › Dispositivos para indicar o limitar el movimiento de elevación del ángulo del aguilón o brazo.
- B66F17/00 B66F […] › Dispositivos de seguridad, p. ej. para limitar o indicar la fuerza de elevación.
- B66F9/075 B66F 9/00 […] › Características o detalles de estructura.
- E02F9/22 E02F 9/00 […] › Mandos hidráulicos o neumáticos.
Clasificación antigua:
- B60G17/015 B60G 17/00 […] › comportando los medios de reglaje elementos eléctricos o electrónicos (B60G 17/005 tienen prioridad).
- B62D49/08 B62D 49/00 […] › que tienen medios para impedir la vuelta o el basculamiento (dispositivos de seguridad para el control de los conjuntos de propulsión especialmente adaptados a los vehículos o dispuestos en ellos B60K 28/00).
- B66C23/90 B66C 23/00 […] › Dispositivos para indicar o limitar el movimiento de elevación del ángulo del aguilón o brazo.
- B66F17/00 B66F […] › Dispositivos de seguridad, p. ej. para limitar o indicar la fuerza de elevación.
- B66F9/075 B66F 9/00 […] › Características o detalles de estructura.
- E02F9/22 E02F 9/00 […] › Mandos hidráulicos o neumáticos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Dispositivo para controlar la estabilidad dinámica de un vehículo industrial.
La presente invención se refiere a un dispositivo para controlar la estabilidad dinámica de un vehículo industrial.
Más en particular, el dispositivo según la presente invención es adecuado para ser equipado en un vehículo industrial tal como carretillas elevadoras con brazo telescópico, elevadores de cangilones o retroexcavadoras, camiones grúa, tractores y similares.
Como es conocido, durante las operaciones de maniobra o trabajo con estos vehículos industriales, el cárter o chasis del vehículo está sometido a una pluralidad de cargas externas que pueden esquematizarse como fuerzas y momentos de fuerza que tienden a influir en la estabilidad del vehículo.
Esto se ve acentuado por los fenómenos que suceden con el vehículo totalmente cargado y/o sobre un suelo irregular.
De hecho, durante las operaciones para maniobrar un vehículo industrial con suspensiones, todo el cárter o chasis del vehículo está sujeto a diversos esfuerzos determinados por una serie de fuerzas y momentos de giro que se producen tanto debido al movimiento de la carga como debido a variaciones en la estabilidad del vehículo en movimiento sobre el suelo, pudiendo ocurrir todo ello en condiciones estáticas, casi estáticas o dinámicas.
La medición de magnitudes físicas externas es útil para determinar las condiciones de funcionamiento y estabilidad del vehículo; por ejemplo, es posible medir las fuerzas verticales y los momentos de giro en las distintas direcciones en el espacio para calcular la estabilidad de vehículos industriales con ejes con suspensiones, durante las diversas maniobras de giro, frenado, aceleración o elevación de carga, con el fin de calcular las fuerzas y los momentos inducidos de desestabilización del vehículo.
En la actualidad, la operación para medir estas fuerzas y momentos puede realizarse utilizando instrumentos de medición diseñados específicamente, únicamente mediante simulación que se lleva a cabo en el laboratorio.
Además, hasta la fecha, las diversas magnitudes físicas de interés se miden de manera aproximada y se sitúan en relación con otras mediante transductores de fuerza, que se fijan únicamente de manera externa al cárter del eje o del chasis del vehículo, estando influenciados por tanto por todos los posibles efectos de perturbación o deriva de la señal que va a medirse, que puede verse influenciada por los efectos de la temperatura, deflexiones de las componentes estruc-turales del eje, presiones de trabajo de los frenos, lo que hace que la información final sea imprecisa y poco fiable.
Por tanto, el equipamiento de estos transductores en posiciones específicas de cada eje rotatorio no permite mediciones precisas, ya que se ven influenciadas por muchos factores externos, además de los intrínsecos a la geometría del eje o el acoplamiento del eje con el chasis del vehículo.
Por último, todo esto requiere el desarrollo de algoritmos de transformación complejos, apropiados para traducir la posición a través del tiempo de cada eje de vehículo en el sistema de coordenadas fijas del vehículo.
La patente US nº 5.627.751 da a conocer un vehículo terrestre que comprende un controlador de suspensión que recibe unas señales de entrada generadas desde una pluralidad de sensores, basándose en las cuales controla la suspensión del vehículo mediante la activación de una pluralidad de servoválvulas. El controlador de suspensión descrito en la patente US nº 5.627.751 comprende además unos medios de detección de averías para detectar la avería de un sensor y, en caso de avería, para sustituir la señal del sensor averiado con una señal de sustitución calculada basándose en datos medidos o calculados almacenados en un dispositivo de memoria.
La patente US nº 5.475.593 describe un vehículo que comprende un dispositivo de control central conectado a una pluralidad de dispositivos de control de esquina, cada uno de los cuales activa una servoválvula para controlar un accionador conectado entre la caja del vehículo y el conjunto de rueda, entre cosas, basándose en señales generadas desde un transductor de fuerza.
El objetivo de la presente invención es, por tanto, producir un dispositivo para controlar la estabilidad dinámica de un vehículo industrial que opera en un modo activo e integrado en el vehículo, durante su utilización normal, para garantizar las mejores condiciones de estabilidad y autonivelación de este vehículo.
Otro objetivo de la presente invención es producir un dispositivo para controlar la estabilidad dinámica de un vehículo industrial, que puede instalarse de manera sencilla y que puede permitir a un operador sentado en la cabina recibir información de todas las condiciones próximas al límite de estabilidad en el que el propio vehículo puede funcionar.
Otro objetivo adicional de la presente invención es presentar un dispositivo para controlar la estabilidad dinámica de un vehículo industrial que aumenta de manera considerable la fiabilidad y comodidad global del vehículo en el que está equipado, reduciendo los esfuerzos a los que puede estar sujeto el chasis del vehículo.
Estos y otros objetivos se alcanzan mediante un vehículo industrial que comprende un dispositivo para controlar la estabilidad dinámica del vehículo, tal como se reivindica en la reivindicación 1, a la que se hace referencia por motivos de brevedad.
Otras características de la presente invención también se definen en las reivindicaciones posteriores.
Otros objetivos y ventajas de la presente invención se pondrán más claramente de manifiesto a partir de la descripción siguiente y de los dibujos adjuntos, proporcionados únicamente a título de ejemplo ilustrativo y no limitativo, en el que:
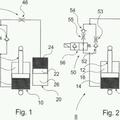
- la figura 1 muestra una vista frontal de un par de ejes, montados en un chasis genérico de un vehículo industrial, que incorporan el dispositivo para controlar la estabilidad dinámica, según la presente invención, estando situados dichos ejes mutuamente en una primera posición de funcionamiento;
- la figura 2 muestra una vista frontal del par de ejes de la figura 1, en una segunda posición de funcionamiento mutua;
- la figura 3 muestra una vista, en sección parcial según un plano perpendicular al eje de uno de los ejes, de un conjunto que comprende parte del eje y una cilindro hidráulico, que envía presión a un transductor situado en el mismo para leer electrónicamente la medición de presión (en cada cubo de rueda respectivamente) con el fin de procesar datos necesarios para establecer las condiciones de estabilidad dinámica de un vehículo industrial, según la presente invención; y
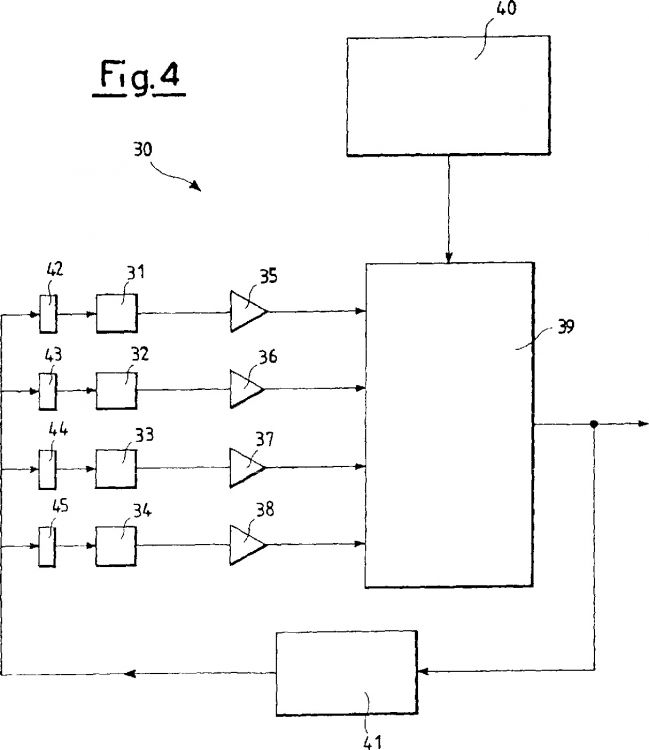
- la figura 4 muestra un diagrama de bloques que muestra la lógica de funcionamiento del dispositivo para controlar la estabilidad dinámica de un vehículo industrial, según la presente invención.
Haciendo referencia específica, en primer lugar, a las figuras 1-2, el conjunto de eje se indica globalmente con la referencia numérica 10, y en las figuras 1-2 puede verse que cada eje 10', 10'' comprende un cárter 11 central desde el cual se extienden brazos de suspensión 12 y 13 y 12' y 13'.
En el extremo de cada uno de los brazos de suspensión 12, 13, 12' y 13', están previstos unos pivotes de dirección articulados 14, 15, 14', 15' de las ruedas; no se muestran dichas ruedas por motivos de simplicidad.
El cárter 11 central también soporta un accionador de dirección, que puede hacer que su barra se deslice axialmente.
Además, interpuestos entre los ejes 10', 10'' y el chasis 16 del vehículo industrial están dispuestos unos cilindros hidráulicos 17, 17' y 18, 18'.
Los cilindros hidráulicos 17, 17' y 18, 18' están conectados a unas charnelas 19, 20 solidarias con el chasis 16.
Las barras de los cilindros hidráulicos 17, 17' y 18, 18' están conectadas, en lugar de ello, a unas charnelas 21, 22, 21' y 22' solidarias con los brazos de suspensión 12 y 13 y 12' y 13' de los ejes 10', 10''.
Los cilindros hidráulicos 17, 17' y 18, 18' se alimentan por una unidad de control hidráulica controlada electrónicamente.
No se proporciona una descripción más detallada de la estructura del par de ejes y su ensamblaje en el chasis de un vehículo industrial en la presente memoria descriptiva y, por tanto, sólo se hace referencia a los elementos funcionales útiles para...
Reivindicaciones:
1. Vehículo industrial que comprende un dispositivo (30) para controlar la estabilidad dinámica de dicho vehículo, en el que el chasis de dicho vehículo está equipado con por lo menos un par de ejes (10', 10''), comprendiendo cada uno unos brazos de suspensión (12, 13, 12', 13'), comprendiendo el extremo distal de cada brazo de suspensión unos pivotes de dirección articulados (14, 15, 14' 15') para las ruedas de dicho vehículo, y en el que interpuestos entre el eje (10',10'') y el chasis (16) de dicho vehículo industrial están previstos unos cilindros hidráulicos (17, 17', 18, 18'), comprendiendo dicho dispositivo de control (30) una pluralidad de transductores de presión (31-34) capaces de indicar las cargas que soporta en cada momento cada cubo de rueda y conectados a una unidad de control (39), en el que cada uno de dichos cilindros hidráulicos (17, 17', 18, 18') está asociado con un respectivo transductor de presión de dicha pluralidad de transductores de presión (31-34) para detectar y proporcionar en tiempo real a la unidad de control (39) unos datos de entrada en los que basar la evaluación de la estabilidad del vehículo, permitiendo de este modo mediante un procesamiento de datos adecuado, reconocer las condiciones de estabilidad de dicho vehículo, en el que dicho dispositivo de control (30) comprende además un bloque de memoria (40) conectado a dicha unidad de control (39), comprendiendo dicho bloque de memoria (40) unos datos de vehículo de dicho vehículo, caracterizado porque dicha unidad de control (39) procesa una señal relevante para las condiciones de estabilidad de dicho vehículo a través de un proceso de autoaprendizaje que tiene en cuenta dichos datos de vehículo que pueden almacenarse en el dispositivo (30) en el momento en el que el vehículo sale de la cadena de montaje.
2. Vehículo industrial según la reivindicación 1, caracterizado porque cada uno de dichos transductores de presión (31-34) está asociado con por lo menos uno de dichos cilindros hidráulicos (17, 17', 18, 18'), de tal manera que cada uno de dichos transductores de presión (31-34) transmite su señal a dicha unidad de control (39), que procesa una señal relevante para las condiciones de estabilidad del vehículo, accionándose dichos cilindros mediante unas tuberías (42-45).
3. Vehículo industrial según la reivindicación 1 ó 2, caracterizado porque dicha unidad de control (39) envía señales que ha procesado a un sistema hidráulico lógico apropiado que incorpora unas válvulas hidráulicas apropiadas para controlar el flujo hacia dichas tuberías (42-45), estando asociada cada una de ellas a uno de dichos cilindros hidráulicos (17, 17', 18, 18') para actuar dinámicamente sobre la estabilidad de dicho vehículo.
4. Vehículo industrial según las reivindicaciones anteriores, caracterizado porque dicho bloque (40) funciona mediante un sistema de autoaprendizaje inteligente.
5. Vehículo industrial según las reivindicaciones anteriores, caracterizado porque la presión dentro de dichos cilindros hidráulicos (17, 17', 18, 18') puede regularse mediante un circuito hidráulico lógico apropiado que incorpora unas válvulas apropiadas para controlar el flujo.
6. Vehículo industrial según las reivindicaciones anteriores, caracterizado porque cada uno de dichos transductores de presión (31, 32, 33, 34) está asociado con un respectivo amplificador (35, 36, 37, 38) para enviar señales amplificadas a dicha unidad de control (39).
7. Vehículo industrial según las reivindicaciones anteriores, caracterizado porque dicho dispositivo (30) es capaz de reconocer variables tales como la extensión del brazo de la grúa y cualquier inclinación hacia abajo de las horquillas equipadas en el extremo de dicho brazo que soporta la carga real.
8. Vehículo industrial según las reivindicaciones anteriores, caracterizado porque dicho dispositivo (30) es capaz de reconocer las condiciones límite de estabilidad lateral, en cuyo caso emite una señal que deshabilita el arranque del vehículo, actuando sobre la transmisión para impedir de este modo el movimiento del vehículo.
9. Vehículo industrial según las reivindicaciones anteriores, caracterizado porque dicho dispositivo (30) está provisto de un dispositivo de aviso acústico y/o visual que avisa al operador del vehículo de la posibilidad de condiciones límite de estabilidad del vehículo.
10. Vehículo industrial según las reivindicaciones anteriores, caracterizado porque dicho dispositivo (30) está provisto de un modo de autonivelación longitudinal en condiciones de carga completa cuando se desplaza a velocidades bajas con el sistema de amortiguación de las suspensiones desactivado.
Patentes similares o relacionadas:
AMORTIGUADOR NEUMOMAGNÉTICO, del 28 de Abril de 2020, de GARCÍA SUÁREZ, Alexander: 1. Amortiguador neumomagnético, del tipo que comprenden un cilindro con un pistón , que se encuentran definiendo una cámara interior […]
SISTEMA DE AMORTIGUACIÓN AJUSTABLE PARA VEHÍCULOS, del 11 de Octubre de 2019, de TEJERO DAMAS, Victor Manuel: 1. Sistema de amortiguación ajustable para vehículos caracterizado porque está configurado a partir de un amortiguador ajustable formado por un resorte , de tal manera […]
Protección contra fuerzas excesivas en una disposición de suspensión, del 29 de Noviembre de 2018, de Teknologian tutkimuskeskus VTT Oy: Una disposición de suspensión para suspender un objeto a un bastidor y para protección contra fuerzas de excitación excesivas (Fe) transmitidas […]
Dispositivo de válvula para un sistema de suspensión neumática, del 17 de Mayo de 2017, de WABCO GMBH: Dispositivo de válvula para un sistema de suspensión neumática en un vehículo, (a) presentando el dispositivo de válvula al menos una conexión de fuelle (14, […]
Dispositivo de válvula para un sistema de suspensión neumática, del 12 de Abril de 2017, de WABCO GMBH: Dispositivo de válvula para un sistema de suspensión neumática en un vehículo, (a) presentando el dispositivo de válvula al menos una conexión de fuelle , […]
Procedimiento para la regulación de una estructura de suspensión neumática de un vehículo, del 18 de Enero de 2017, de SIEMENS AG OSTERREICH: Procedimiento para la regulación de una estructura de suspensión neumática de un vehículo, en donde desde el estado actual de un vehículo se derivan parámetros […]
 Dispositivo de suspensión eléctrica y motocicleta, del 16 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de suspensión eléctrica para una motocicleta para absorber choques entre una carrocería de vehículo y una rueda trasera […]
Dispositivo de suspensión eléctrica y motocicleta, del 16 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de suspensión eléctrica para una motocicleta para absorber choques entre una carrocería de vehículo y una rueda trasera […]
 Dispositivo y procedimiento de suspensión durante acción por resorte y/o acción de amortiguación para vehículo, del 24 de Febrero de 2016, de BAE SYSTEMS HAGGLUNDS AKTIEBOLAG: Un dispositivo (I; II; III; IV) de suspensión que comprende una configuración de entrada y de salida respectivamente, para un vehículo que comprende […]
Dispositivo y procedimiento de suspensión durante acción por resorte y/o acción de amortiguación para vehículo, del 24 de Febrero de 2016, de BAE SYSTEMS HAGGLUNDS AKTIEBOLAG: Un dispositivo (I; II; III; IV) de suspensión que comprende una configuración de entrada y de salida respectivamente, para un vehículo que comprende […]