CIP-2021 : B62D 55/265 : teniendo adherencia magnética o neumática.
CIP-2021 › B › B62 › B62D › B62D 55/00 › B62D 55/265[4] › teniendo adherencia magnética o neumática.
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
Notas[g] desde B62D 47/00 hasta B62D 63/00: Vehículos de motor o remolque según el tipo; Sus piezas o accesorios no previstos en otro lugar
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES.
B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M).
B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00).
B62D 55/265 · · · · teniendo adherencia magnética o neumática.
CIP2021: Invenciones publicadas en esta sección.
(19/02/2020) Una rueda magnética que comprende:
un bloque de equilibrio que incluye un cuerpo de bloque circular y una primera porción de marco que tiene un diámetro mayor que el cuerpo de bloque circular;
un cuerpo magnético que está provisto en el cuerpo de bloque circular del bloque de equilibrio y une el bloque de equilibrio a un objeto (P) de unión con una fuerza magnética; y
un bloque de protección magnético que está provisto en el bloque de equilibrio y guía un campo magnético generado en el cuerpo magnético hacia el objeto (P) de unión,
un cojinete provisto en el cuerpo de bloque circular para soportar de manera giratoria un eje de soporte que pasa a través del cuerpo de bloque circular,
un miembro de fijación de eje de soporte está provisto para fijar el eje de soporte…
(09/01/2019) Un dispositivo de oruga que comprende:
una parte de eliminación de película de agua que se proporciona en un miembro (C) de transmisión de potencia que incluye cadenas, presiona y elimina una película de agua entre un objeto de conexión como un material magnético y el miembro (C) de transmisión de energía con una fuerza magnética, y une el miembro de transmisión de potencia al objeto de conexión para asegurar una fuerza de fricción;
caracterizado porque
se proporciona una parte de conexión de imán en cuerpo de aparato que está conectada al miembro (C) de transmisión de potencia y une el cuerpo del aparato al objeto de conexión, y
en el que la parte de eliminación de película de agua incluye:
…
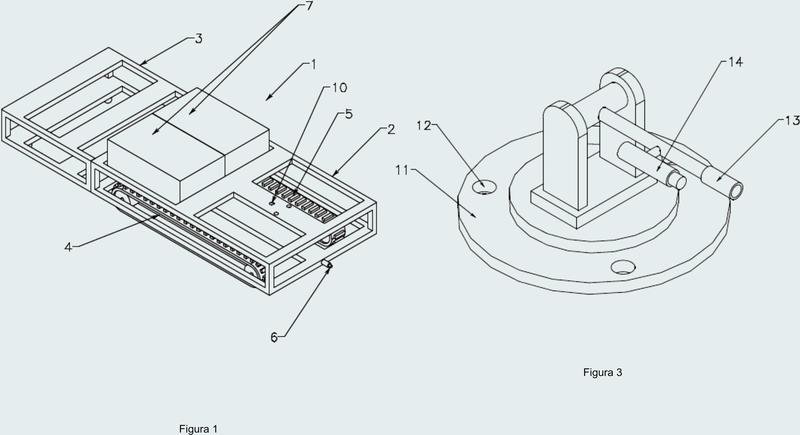
Plataforma Autopropulsada.
(10/12/2018) 1. Plataforma autopropulsada, para elevación de cargas en el fuste metálico de un aerogenerador o una estructura similar, caracterizada porque posee un orificio central para el paso del fuste o estructura, y comprende dos o más carros de elevación distribuidos por todo el borde del orificio central, teniendo cada carro al menos una oruga portadora de una serie de imanes de adhesión al fuste o estructura.
2. Plataforma, según la reivindicación 1, formada por una pluralidad de módulos .
3. Plataforma, según la reivindicación 1, donde los imanes de al menos una oruga son permanentes y poseen una posición…
(26/05/2017). Solicitante/s: Tratamiento Superficial Robotizado, S. L. Inventor/es: CASANOVA GAYOSO,Jose Antonio.
Robot para el mantenimiento de superficies aproximadamente verticales, con dispositivo para impedir el vuelco por cabeceo del robot al desplazarse por las superficies verticales y elementos que aseguran la adherencia a las superficies metálicas; así como dispositivos de control y guiado inalámbricos, un cañón de agua a alta presión, una cámara fotográfica y una cámara videográfica. El robot puede ser utilizado para labores, tales como limpieza, inspección, mantenimiento y reparación de las superficies verticales, por ejemplo la torre de un aerogenerador, o de elementos situados cerca de ellas, como las palas del referido aerogenerador.
Sistema de montaje con seguimiento autónomo.
(12/04/2017) Un dispositivo, que comprende:
un dispositivo motorizado automatizado operable para moverse en una estructura para utilizarse en el montaje de la estructura , el dispositivo motorizado automatizado que comprende:
un efector extremo configurado para realizar una pluralidad de funciones relacionadas con el montaje;
un primer conjunto de movimiento, que comprende una primera pluralidad de componentes de movimiento de función doble;
un segundo conjunto que comprende una segunda pluralidad de componentes de movimiento de función doble; y
un conjunto de pivotamiento conectado de forma concéntrica al efector extremo, y al menos uno de, el primer conjunto de movimiento y el segundo conjunto de movimiento;
en donde:
las funciones de cada componente de movimiento de función doble comprenden adherir y…
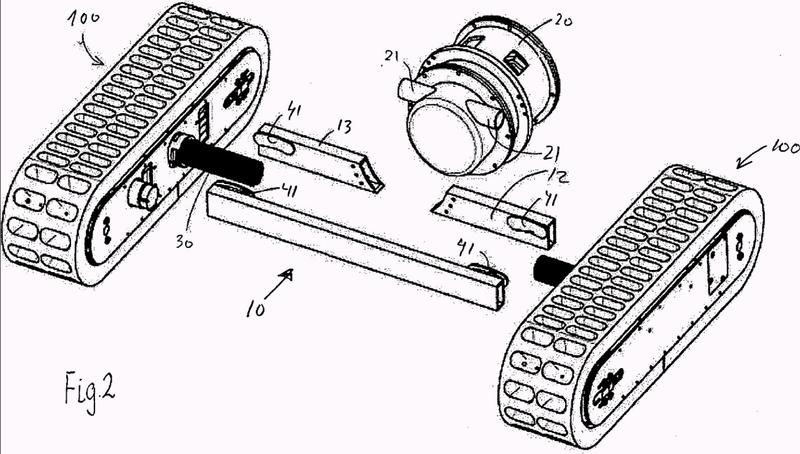
(09/03/2016). Ver ilustración. Solicitante/s: FORCE TECHNOLOGY. Inventor/es: HANSEN,PEDER BENT, NIELSEN,STEEN ARNFRED.
Una oruga de pared de vacío que tiene al menos una unidad de pista de vacío , que comprende:
- un bastidor de pista ;
- dos poleas provistas en extremos opuestos del bastidor de la oruga y que definen una distancia entre ejes (W) entre las mismas;
- una pista sin fin dispuesta para circular sobre las dos poleas y que comprende una banda flexible , comprendiendo dicha banda flexible una pluralidad de aberturas y teniendo un espesor (T);
- una caja de distribución de vacío provista en dicho bastidor de pista
en la que la caja de distribución de vacío está en comunicación con una porción de aberturas para distribuir un vacío a la porción de aberturas cuando la pista sin fin circula, caracterizada por que el espesor (T) de la banda flexible es del 5 al 20 % de la base de la rueda (W).
PDF original: ES-2571597_T3.pdf
(22/12/2015). Ver ilustración. Solicitante/s: Tratamiento Superficial Robotizado, S. L. Inventor/es: CASANOVA GAYOSO,Jose Antonio.
Robot para el mantenimiento de superficies aproximadamente verticales, con dispositivo para impedir el vuelco por cabeceo del robot al desplazarse por las superficies verticales y elementos que aseguran la adherencia a las superficies metálicas; así como dispositivos de control y guiado inalámbricos, un cañón de agua a alta presión, una cámara fotográfica y una cámara videográfica. El robot puede ser utilizado para labores, tales como limpieza, inspección, mantenimiento y reparación de las superficies verticales, por ejemplo la torre de un aerogenerador, o de elementos situados cerca de ellas, como las palas del referido aerogenerador.
PDF original: ES-2554705_B2.pdf
PDF original: ES-2554705_A1.pdf
ROBOT PARA EL TRATAMIENTO ESTRUCTURAS METALICAS.
(27/03/2014). Ver ilustración. Solicitante/s: ELIOT SYSTEMS, S.L. Inventor/es: MASIA PERALES,Jordi.
Robot para el tratamiento de estructuras metálicas, del tipo que comprende dos unidades de accionamiento por oruga y desplazamiento mediante suelas magnéticas sobre una correa sinfín y donde dichas unidades de accionamiento mediante oruga están unidas longitudinalmente mediante dos bisagras intermedias con un cuerpo central y dos cuerpos laterales , en donde dichas bisagras intermedias están configuradas para que cada unidad de accionamiento por oruga oscile lateralmente con respecto a la oruga contraria y que comprende unos medios de articulación transversal solidariamente unidos al chasis de soporte y a los cuerpos laterales configurados para que cada unidad de accionamiento por oruga gire con respecto a la oruga contraria; y que además comprende unos medios de estabilización del conjunto del robot configurados para mantener una presión constante y uniforme sobre la superficie de tratamiento.
Instalación para el montaje de piezas de carrocería.
(16/10/2013) Instalación para el montaje de una carrocería de vehículo, que comprende:
- una estación de mecanización para el montaje y/o mecanización de piezas de la carrocería, a la que sepuede alimentar a través de una instalación de transporte de la carrocería a lo largo de una línea detransporte (X) una pieza central de la carrocería que debe mecanizarse/ montarse,
- un bastidor de fijación que se puede equipar con al menos otra pieza de la carrocería,
- un carro de transporte que lleva el bastidor de fijación con al menos dos mecanismos de traslación distanciados entre sí, en el que al menos uno de los mecanismos de traslación presenta unainstalación de accionamiento, y
- una guía de carriles (S) para los mecanismos de traslación , a través de los cuales el bastidor defijación se…
DISPOSITIVO ROBOTIZADO Y MÉTODO PARA EL CAMBIO DE ACEITE EN LAS MULTIPLICADORAS DE LOS AEROGENERADORES.
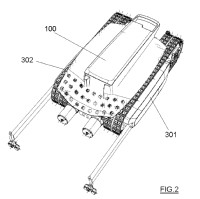
(23/05/2013). Ver ilustración. Solicitante/s: ELIOT SYSTEMS, S.L. Inventor/es: MASIA PERALES,Jordi.
Dispositivo robotizado y método para el cambio de aceite en las multiplicadoras de los aerogeneradores que comprende un dispositivo tractor de tipo de oruga con desplazamiento mediante suelas magnéticas sobre las bandas de dicho robot oruga, que en la parte superior de dicho tractor se sitúa solidariamente un depósito doble que comprende dos compartimentos estancos (100a,100b), en donde un primer compartimento se emplea para el transporte de aceite limpio y un segundo compartimento para el aceite usado; y donde la máquina tractora comprende, además, una manguera conectada con una bomba (102a, 102b) que a su vez está conectada con una entrada del depósito ; en donde en dicha entrada , a su vez, se sitúan dos electroválvulas configuradas para regular el paso hacia la manguera del aceite en uno u otro compartimento (100a,100b) del depósito doble.
DISPOSITIVO MEJORADO PARA RUEDA DE ORUGA CON BANDA MAGNÉTICA.
(07/02/2013) Dispositivo mejorado para rueda de oruga con banda magnética que se caracteriza porque comprende una cavidad en la que se aloja un imán , siendo esta cavidad lo suficientemente profunda como para poder introducir por completo el imán y un elemento de fijación del propio dispositivo con la banda magnética en la que se coloca y que donde unas aristas laterales del dispositivo están provistas de cantos redondeados .
DISPOSITIVO MEJORADO PARA RUEDA DE ORUGA CON BANDA MAGNETICA.
(20/12/2012). Ver ilustración. Solicitante/s: ELIOT SYSTEMS, S.L. Inventor/es: MASIA PERALES,JORGE.
Dispositivo mejorado para rueda de oruga con banda magnética que se caracteriza por que comprende una cavidad en la que se aloja un imán , siendo esta cavidad lo suficientemente profunda como para poder introducir por completo el imán y un elemento de fijación del propio dispositivo con la banda magnética en la que se coloca y que donde unas aristas laterales del dispositivo están provistas de cantos redondeados.
DISPOSITIVO DE SEGURIDAD PARA DISPOSITIVO TRACTOR.
(16/05/2012) 1. Dispositivo de seguridad para un dispositivo tractor de tipo de oruga con desplazamiento mediante suelas magnéticas sobre las bandas de dicho robot oruga, comprendiendo dos unidades de accionamiento independientes y en donde cada una de estas unidades de accionamiento están unidas entre sí por una rótula que permite la rotación transversal respecto del cuerpo central, y unidas igualmente por una bisagra longitudinal, que habilita el giro de cada unidad de accionamiento tanto transversal como longitudinalmente caracterizado porque comprende dos servomotores posicionados respectivamente en la parte fija de las orugas del dispositivo tractor, conectados a unos tornos unidos a su vez a unas cinchas , además el dispositivo de la invención comprende un cable…
ROBOT PARA TRATAR Y/O TRABAJAR SOBRE ESTRUCTURAS EXTERNAS DE ACERO.
(25/11/2009) Robot para tratar y/o trabajar superficies o partes externas de estructuras grandes de acero, dicho robot siendo del tipo con orugas para su desplazamiento mediante suelas magnéticas (M) sobre las bandas de dicho robot oruga, comprendiendo dos unidades de accionamiento independientes unidas mediante bisagras longitudinalmente por los lados una con la otra en una ubicación intermedia con respectivos medios de bisagra laterales , dichos medios de bisagra laterales comprendiendo al menos un medio de bisagra intermedio longitudinal teniendo un eje intermedio longitudinal substancialmente capaz de permitir que una unidad oscile lateral y transversalmente con respecto a la otra…
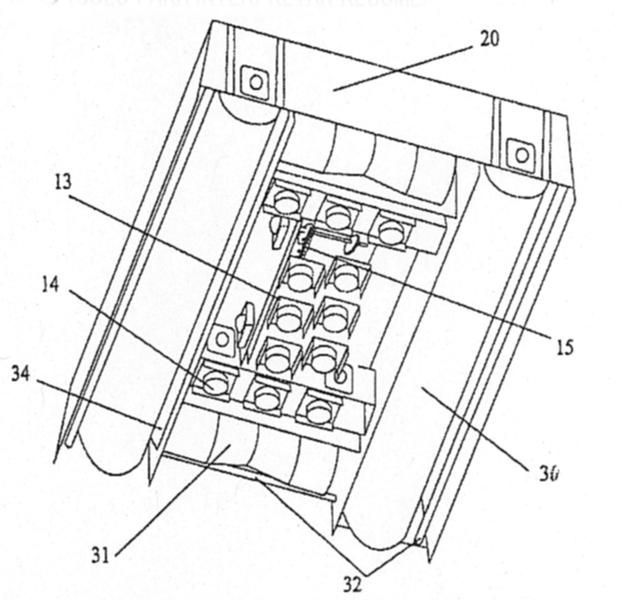
ROBOR TREPADOR LIMPIADOR DESLIZANTE POR CADENA DE ELECTROIMANES.
(16/06/2008). Ver ilustración. Solicitante/s: ASCEND RMM, S.L. Inventor/es: PEREZ MOURE,MANUEL.
Robot trepador limpiador deslizante por cadena de electroimanes, para trabajos de limpieza sobre superficies metálicas (como torres eólicas, cascos de barcos, chimeneas metálicas y cualquier superficie plana metálica) en lugares de difícil acceso y peligrosos para las personas, basado (dibujo de vista inferior con chasis -20-) en dos conjuntos de orugas dispuestos horizontal y verticalmente que incorporan unos electroimanes alternativamente montados sobre una cadenas , empleando soportes ; mediante las cadenas el robot se desplaza a la vez que asegura su adherencia, y se activan según el movimiento que queramos realizar. Permite desplazarnos verticalmente hasta 100m y de izquierda a derecha en un rango 15 metros, efectuando la limpieza empleando unos rociadores de líquidos disolventes y unos rodillos de limpieza , que son secados y limpiados a su vez por unos bloques limpiadores , recogiéndose los residuos por medio de unos sticks accionados por unos electroimanes.
DISPOSITIVO DE TRASLACION AUTOTREPANTE PARA FACHADAS, EN PARTICULAR FACHADAS DE VIDRIO.
(01/12/2005). Ver ilustración. Solicitante/s: UNIQUE CLEANING SYSTEMS GMBH. Inventor/es: SMOLINSKI, HANS-JOACHIM, MEYER, STEFFEN, HASL, WERNER.
Dispositivo de traslación autotrepante para fachadas, en particular fachadas de vidrio, con un accionamiento a base de hileras continuas de ventosas regulables, caracterizado porque las ventosas circulan por el plano de deslizamiento y sus caras aspirantes miran siempre hacia la superficie (F) de deslizamiento.
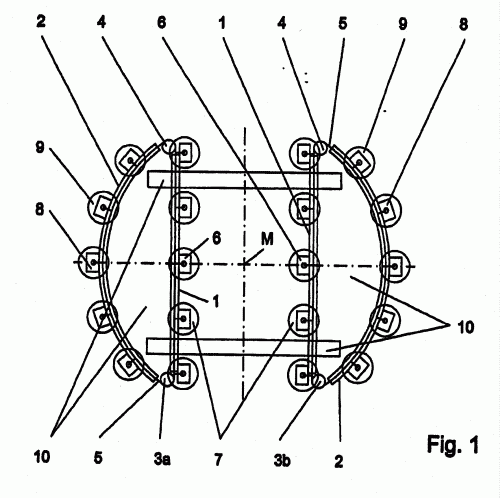
(01/03/2002). Solicitante/s: SEEMANN, HENRY. Inventor/es: SEEMANN, HENRY.
UN ROBOT PARA REALIZAR UNA OPERACION DE TRABAJO EN UNA SUPERFICIE. EL ROBOT COMPRENDE UNA ESTRUCTURA QUE SOPORTA UN PAR DE GUIAS PARALELAS . UNA CADENA DE ENLACE SIN FIN ESTA MONTADA PARA DIRIGIR CADA GUIA Y CADA CADENA ES ACCIONADA POR UN MOTOR INDEPENDIENTE MONTADO EN LA ESTRUCTURA. CADA GUIA ESTA PROVISTA CON AL MENOS DOS RECESOS CON CADA RECESO TENIENDO UN LADO ABIERTO ENFRENTE DE LA CADENA CORRESPONDIENTE. UNA SERIE DE VENTOSAS ESTAN MONTADAS EN CADA CADENA Y ADAPTADAS PARA ENGANCHARSE A LA SUPERFICIE A RECORRER. UNA SERIE DE PUERTOS CONECTAN LOS RECESOS DE CADA GUIA Y LOS GRUPOS DE VENTOSAS EN CADA CADENA. UNA FUENTE DE VACIO ESTA CONECTADA A LOS RECESOS Y ACTUA A TRAVES DE LOS PUERTOS PARA QUE LAS VENTOSAS CORRESPONDIENTES PERMITAN QUE LAS VENTOSAS SE AGARREN A LA SUPERFICIE. EL ROBOT SE EMPLEA CON UN SISTEMA DE RASTREO LASER EN LA INSPECCION NO DESTRUCTIVA DE UN AVION.
DISPOSITIVO DE CONTROL A DISTANCIA DE UNA ESTRUCTURA, QUE COMPRENDE UNA CUBA PRINCIPAL REVESTIDA EXTERIORMENTE POR UNA CUBA DE SEGURIDAD.
(16/04/1977). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Resumen no disponible.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}