CIP-2021 : B25J 15/04 : con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
CIP-2021 › B › B25 › B25J › B25J 15/00 › B25J 15/04[1] › con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 15/00 Cabezas de aprehensión.
B25J 15/04 · con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
CIP2021: Invenciones publicadas en esta sección.
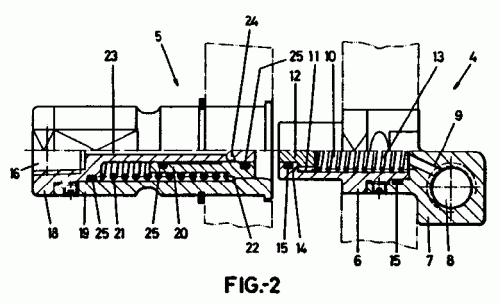
ACOPLAMIENTO PARA LA UNION DE PINZAS PORTADORAS DE PIEZAS DE TRABAJO CON UN DISPOSITIVO DE MANIPULACION.
(16/03/2004). Ver ilustración. Solicitante/s: BILSING AUTOMATION GMBH. Inventor/es: BILSING, ALFRED.
EL ACOPLAMIENTO DE ACCIONAMIENTO MOTORIZADO SIRVE PARA UNIR PINZAS PORTAPIEZAS CON UN DISPOSITIVO DE MANIPULACION, EN PARTICULAR CON UN ROBOT, QUE TRANSPORTE PIEZAS DE UNA PRENSA HASTA LA SIGUIENTE. EL ACOPLAMIENTO SE COMPONE DE UNA PARTE FIJA SITUADA EN EL LADO DE ACCIONAMIENTO Y UNA PIEZA DE CONEXION POR EL LADO DE LA PINZA. PUESTO QUE NORMALMENTE SE UTILIZA UN GRAN NUMERO DE DIFERENTES PORTAPIEZAS Y DADO QUE LAS PIEZAS DE CONEXION DEL LADO DE LA PINZA TIENEN UNOS COSTES ELEVADOS, SE PROPONE QUE LA PARTE FIJA DEL ACOPLAMIENTO PRESENTE UNA PINZA DE AMARRE Y LA PIEZA DE CONEXION SEA UN TROZO DE TUBO QUE SE PUEDE CENTRAR EN LA PARTE FIJA CON UNA DISTANCIA INTERMEDIA RESPECTO A LAS PIEZAS DE PRESION (EN 68, 76) SITUADAS EN EL EXTREMO ANTERIOR DE LA PINZA DE PRESION. EL TRAMO TUBULAR SE CENTRA PREFERENTEMENTE MEDIANTE UN SEGUNDO PUNTO DE PRESION (EN 70, 78) PREVISTO CON SEPARACION RESPECTO AL PUNTO DE APRIETE ANTERIOR (EN 68, 76).
(16/12/2001). Solicitante/s: KUKA SCHWEISSANLAGEN GMBH. Inventor/es: KIKUT, BOTHO.
Acoplamiento reversible para fijación liberable de herramientas en manipuladores , compuesta de dos piezas de acoplamiento y de un enclavamiento en unión positiva de forma, presentando el enclavamiento varios elementos de bloqueo móviles capaces de rodar, un cilindro asociado a la primera pieza del acoplamiento con pistón para accionar los elementos de bloqueo y las aberturas receptoras correspondientes en las piezas del acoplamiento, caracterizado porque las aberturas receptoras de la segunda pieza del acoplamiento están configuradas como canales de bolas esencialmente cilíndricos, que presentan un eje de canal, que discurre oblicuamente a las aberturas receptoras de la primera pieza del acoplamiento.
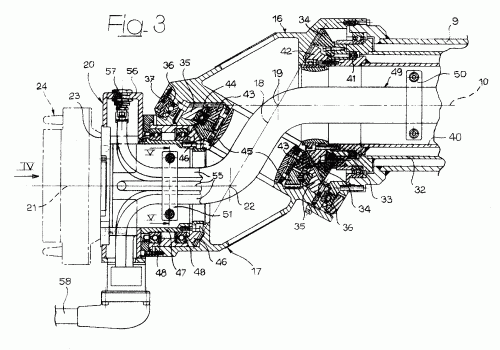
(01/02/2001). Ver ilustración. Solicitante/s: COMAU S.P.A.. Inventor/es: FIORA, ALDO.
LA INVENCION SE REFIERE A UNA ARTICULACION PARA UN ROBOT INDUSTRIAL QUE COMPRENDE TRES ELEMENTOS SUSTENTADOS GIRATORIAMENTE EN TORNO A EJES DE ROTACION RESPECTIVOS , COPLANARES E INCLINADOS MUTUAMENTE, QUE DEJAN UN ESPACIO LIBRE EN SU INTERIOR PARA EL PASO DE CABLES DE ALIMENTACION QUE HAN DE CONECTARSE A LA HERRAMIENTA FIJADA A LA ARTICULACION ROBOTICA. ESTA ULTIMA TIENE UNA BRIDA FRONTAL PARA ACOPLAR LA HERRAMIENTA Y VARIAS SALIDAS RADIALES PARA LOS CITADOS CABLES DE ALIMENTACION , A FIN DE PERMITIR EL USO DE UNA BRIDA DE ACOPLAMIENTO DE HERRAMIENTAS DE ESTRUCTURA SIMPLIFICADA.
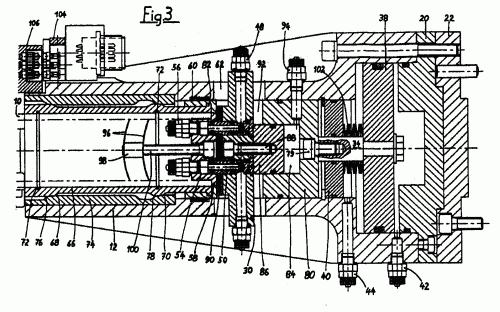
DISPOSITIVO DE CAMBIO AUTOMATICO DE GARRA DE ROBOT CON TRANSMISION HIDRAULICA.
(16/01/2001). Ver ilustración. Solicitante/s: CENTRO TECNOLOGICO ROBOTIKER. Inventor/es: APARICIO RODRIGUEZ,JOSE MARIA, DORRONSORO ENDIGUREN,MIGUEL, IDIGORAS LEIBAR,IGONE.
Dispositivo de cambio automático de garra de robot con transmisión hidráulica. El dispositivo forma parte de un acoplamiento por enchufe rápido de la garra que porta la herramienta al brazo de un robot, estando constituido por dos piezas y , dotadas de correspondientes orificios y de enchufe de los conductos de alimentación hidráulica del brazo del robot y de la herramienta acoplada en aquel, contando además esas piezas y con respectivas piezas móviles y desplazables axialmente y que obturan en posición de reposo los correspondientes extremos de tramos y que dan continuidad a los conductos que comunican, en cada pieza, con los orificios de conexión y , de manera que en el enfrentamiento y acoplamiento entre ambas piezas y se produce el retraimiento de las piezas móviles y y la comunicación de los tramos de conducto y , estableciéndose un paso de fluido entre los orificios de entrada y de salida . Figura 2.
ACOPLAMIENTO DE FLUIDO GIRATORIO.
(01/08/1998). Solicitante/s: RANSBURG CORPORATION. Inventor/es: RODGERS, MICHAEL C.
SE PREVE UN ROBOT PARA MANIPULAR UN DISPOSITIVO DE ATOMIZACION . EL ROBOT TIENE UN BRAZO QUE TIENE UN EXTREMO PROXIMO PARA ACOPLARLO A UN CONTROLADOR DE ROBOT Y UN EXTREMO DISTANTE PARA SOPORTAR EL DISPOSITIVO DE ATOMIZACION . EL DISPOSITIVO DE ATOMIZACION ESTA ACOPLADO A LA FUENTE DE FLUIDO A ATOMIZAR. EL ACOPLAMIENTO COMPRENDE UN PRIMER CONDUCTO FLEXIBLE QUE TIENE UN PRIMER EXTREMO ACOPLADO A LA FUENTE DE FLUIDO Y UN ACOPLADOR DE FLUIDO GIRATORIO PARA ACOPLAR UN SEGUNDO EXTREMO DEL PRIMER CONDUCTO FLEXIBLE AL DISPOSITIVO DE ATOMIZACION . EL ACOPLADOR COMPRENDE UNA PRIMERA PARTE EN LA QUE UNA SEGUNDA PARTE 66 ES SOPORTADA GIRATORIAMENTE. LA SEGUNDA PARTE COMPRENDE UN PASO A TRAVES DEL CUAL EL FLUIDO ES TRANSPORTADO DESDE LA FUENTE AL DISPOSITIVO DE ATOMIZACION . LA SEGUNDA PARTE ES BLOQUEADA IN SITU POR PASADOR CARGADO DE MUELLE DE MANERA QUE SE PUEDA RETIRAR FACILMENTE DE LA PRIMERA PARE PARA PERMITIR QUE EL CONDUCTOR FLEXIBLE SEA SUSTITUIDO FACILMENTE.
BRAZO DE ROBOT DE UN ROBOT DE PORTAL PLANO.
(01/12/1997) LA INVENCION SE REFIERE A UN BRAZO DE UN ROBOT DE PORTAL PLANO CON UN CABEZAL DE TRABAJO, QUE ES MOVIBLE EN TRES DIRECCIONES X,Y,Z LINEALES Y ALREDEDOR DE DOS EJES (A,C), Y CON UNA HERRAMIENTA (A) PROVISTA EN EL CABEZAL DE TRABAJO PARA EL REGISTRO DE LOS TRAMOS DE CARTON PLANO EN EL APILAMIENTO (K) DE PRECINTOS POR MEDIO DE UN DISPOSITIVO DE ASPIRACION APLICADO SOBRE LA SUPERFICIE DEL APILAMIENTO Y UN DISPOSITIVO DE AGARRE OSCILANTE, QUE SE CARACTERIZA POR LAS SIGUIENTES CARACTERISTICAS: EL ACOPLAMIENTO MECANICO ENTRE EL CABEZAL DE TRABAJO Y LA HERRAMIENTA SEPARABLE DE EL SE CONSIGUE POR MEDIO DE UNA MORZADA MULTIPLE (M) PREVISTA…
(16/04/1997). Solicitante/s: STADELE, BERTA. Inventor/es: STADELE, ERHARD.
EN UN MANIPULADOR CON AL MENOS UN BRAZO AL QUE ESTA ASEGURADO DE FORMA LIBERABLE UN DISPOSITIVO DE MANEJO POR MEDIO DE UN MIEMBRO DE ACOPLAMIENTO, SE DISPONE DE PERNOS DESLIZANTES DE FORMA OPERATIVA EXTERNAMENTE QUE ESTAN INSTALADOS EN EL MIEMBRO DE ACOPLAMIENTO PARA LIBERAR UN DISPOSITIVO DE BLOQUEO ENTRE EL MIEMBRO DE ACOPLAMIENTO Y EL DISPOSITIVO DE MANEJO.
ROBOT DESPLAZABLE SOBRE PUESTOS DE TRABAJO FIJOS O MOVILES.
(01/02/1996). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: DETRICHE, JEAN-MARIE.
LA INVENCION SE REFIERE A UN ROBOT MANEJABLE A PARTIR DE UN PUESTO DE TRABAJO FIJO O MOVIL, SIENDO ESTE ROBOT DESPLAZABLE, AL MENOS EN PARTE, DESDE EL PUESTO DE TRABAJO MOVIL SOBRE EL PUESTO DE TRABAJO FIJO , O VICEVERSA. EL ROBOT ESTA CONTROLADO POR EL USUARIO MEDIANTE UNA INTERFASE ROBOT/USUARIO UNIDA A MEDIOS DE EMISION/RECEPCION (13 Y 22) QUE ASEGURAN LA COMUNICACION DE INFORMACIONES ENTRE LOS DOS PUESTOS DE TRABAJO. SEGUN UNA VARIANTE DE LA INVENCION, EL ROBOT COMPRENDE UN ACOPLADOR QUE PERMITE ESTABLECER A LA VEZ CONEXIONES MECANICAS Y CONEXIONES ELECTRICAS ENTRE UNO DE LOS PUESTOS DE TRABAJO Y EL ROBOT. SEGUN OTRA VARIANTE DE LA INVENCION, EL ROBOT COMPRENDE UN MEDIO PORTADOR POSICIONADO PERMANENTEMENTE SOBRE UN PUESTO DE TRABAJO Y UN MEDIO MANIPULADOR QUE PUEDE SER DESPLAZADO DE UN MEDIO PORTADOR A OTRO MEDIO PORTADOR. LA INVENCION SE APLICA DE MANERA PARTICULAR AL CAMPO DE LA ROBOTICA DE AYUDA A LOS INVALIDOS, SIENDO ENTONCES EL PUESTO MOVIL UNA SILLA DE RUEDAS ELECTRICA.
CABEZAL PARA EL POSICIONADO DE PIEZAS EN PROCESO DE MONTAJE.
(16/07/1993) CABEZAL PARA EL POSICIONADO DE PIEZAS EN PROCESO DE MONTAJE, ESPECIALMENTE DE PIEZAS DE CONFIGURACION GENERAL PLANA, CARACTERIZADO PORQUE COMPRENDE, UNA CABEZA DE CONEXION AL PORTAHERRAMIENTAS; UNA ARMADURA PORTAMECANISMOS, QUE VA SUSPENDIDA DE LA CABEZA DE CONEXION MEDIANTE ELEMENTOS DE SUSPENSION ELASTICA; UNA PINZA DE CENTRADO COMPUESTA POR DOS BRAZOS RELACIONADOS ENTRE SI Y SUSPENDIDOS DE LA ARMADURA MEDIANTE EJES TRANSVERSALES DE ARTICULACION PARALELOS; UN CILINDRO TRANSVERSAL POSTERIOR DE ACCIONAMIENTO DE LA PINZA, QUE VA MONTADO EN LA ARMADURA POR ENCIMA DE LOS BRAZOS DE DICHA PINZA; Y UN CILINDRO AXIAL EXTREMO, MONTADO EN LA ARMADURA POR DEBAJO DEL CILINDRO TRANSVERSAL, QUE ES PORTADOR DE UN SOPORTE CENTRAL SITUADO ENTRE LAS MORDAZAS DE LA PINZA Y QUE…
DISPOSITIVO PARA LA FIJACION DESMONTABLE DE HERRAMIENTAS A UN APARATO MANUAL.
(16/12/1991). Solicitante/s: EROWA AG. Inventor/es: OBRIST, BASIL.
ESTE DISPOSITIVO PARA LA FIJACION DESMONTABLE DE HERRAMIENTAS EN UN APARATO MANUAL, PARA POR EJEMPL/O UN ROBOT INDUSTRIAL, DISPONE DE UNA TOMA DE HERRAMIENTAS Y UN ORGANO DE ACOPLAMIENTO EN EL APARATO MANUAL, EN EL QUE ESTA FIJADA LA TOMA DE HERRAMIENTAS . EL ORGANO DE ACOPLAMIENTO DISPONE DE UNA SUPERFICIE FRONTAL LIBRE SOBRE LA QUE ESTA FIJADA LA TOMA DE HERRAMIENTAS , ASI COMO UNA GRAN CANTIDAD DE CANALES Y CONTACTOS ELECTRICOS QUE DESEMBOCAN EN LA SUPERFICIE FRONTAL. LA TOMA DE HERRAMIENTAS DISPONE DE UN TRAMO PARA LA COLOCACION EN LA SUPERFICIE FRONTAL DEL ORGANO DE ACOPLAMIENTO , PROVISTO DE CANALES Y CONTACTOS ELECTRICOS . EN LA ZONA DE ESTE TRAMO ESTA INSTALADA UNA PLACA DE CENTRADO , QUE DISPONE DE ABERTURAS CORRESPONDIENTE A LOS VASTAGOS DE CENTRAJE DEL ORGANO DE ACOPLAMIENTO.
DISPOSITIVO DE AGARRE DE UN UTIL PARA TELEMANIPULADORES, ROBOTS INDUSTRIALES O MONTAJES ANALOGOS.
(16/08/1991). Solicitante/s: S.A. DES ETABLISSEMENTS STAUBLI (FRANCE). Inventor/es: TRUCHET, GASTON.
DISPOSITIVO DE AGARRE DE UN UTIL PARA TELEMANIPULADORES, ROBOTS INDUSTRIALES Y MONTAJES ANALOGOS, DEL GENERO DE LOS QUE TIENEN UN MANGUITO PROVISTO DE UN PESTILLO MOVIL QUE ESTA DESTINADO A SER ATRAVESADO POR UN PULSADOR PERFILADO SOLIDARIO DE CADA UTIL Y QUE ES ADECUADO PARA CONECTARSE ELASTICAMENTE EN EL INTERIOR DE UNA DEPRESION ANULAR (16A) PRACTICADA EN DICHO PULSADOR, CARACTERIZADO EN QUE EL PESTILLO , MONTADO EN EL INTERIOR DE UN TALADRO (6B) CONVENIENTEMENTE UNIDO A UNA FUENTE DE FLUIDO BAJO PRESION DESTINADA A ASEGURAR SU DESPLAZAMIENTO AXIAL, ESTA ORIENTADO OBLICUAMENTE CON RELACION AL EJE COMUN DEL MANGUITO Y DEL PULSADOR , DE MODO QUE SU DESPLAZAMIENTO ASEGURA, POR EL ALCANCE DE UN DIENTE INTERNO (9B) CONTRA UNO DE LOS BORDES DE LA DEPRESION ANULAR (16A) DEL PULSADOR, LA APROXIMACION CON FUERZA DEL UTIL Y DEL MANGUITO UNA VEZ ESTE PULSADOR SE ENGANCHA EN EL PESTILLO.
APARATO DE SEGURIDAD PARA BRAZO O MANO DE MANIPULADOR.
(01/05/1990). Solicitante/s: AUTOMOBILES PEUGEOT AUTOMOBILES CITROEN. Inventor/es: BIANNIC, RENE.
APARATO DE SEGURIDAD PARA ORGANO DE PRENSION DE MANIPULADOR DESTINADO A SER INTERPUESTO ENTRE LA MAQUINA Y EL ORGANO DE PRENSION. ESTE APARATO COMPRENDE UN SOPORTE DESTINADO A SER FIJADO SOBRE LA MAQUINA M, DOS GANCHOS (3 Y 3A) MONTADOS DE MANERA GIRATORIA SOBRE ESTE SOPORTE Y APTOS PARA COGER EL ORGANO DE PRENSION B, UN PESTILLO ESCONDIBLE PARA IMPEDIR LA ROTACION DE LOS GANCHOS EN EL SENTIDO CORRESPONDIENTE A LA LIBERACION DEL ORGANO DE PRENSION, Y MEDIOS ELASTICOS DETERIORABLES PARA IMPEDIR QUE EL PESTILLO SE ESCONDA.
PROCEDIMIENTO PARA EL ACCIONAMIENTO DE ROBOTS INDUSTRIALES Y ROBOT INDUSTRIAL PARA LA REALIZACION DEL PROCEDIMIENTO.
(01/11/1985). Solicitante/s: WILHELM KARMANN GMBH.
ROBOT INDUSTRIAL Y PROCEDIMIENTO PARA SU ACCIONAMIENTO. CONSTA DE: UN BRAZO CON UNA PLACA DE CONEXION Y MORDAZAS DE SUJECION AL QUE SE PUEDE CONECTAR UNA HERRAMIENTA CON UNA PLACA DE CONEXION ; UN CARGADOR PARA LA HERRAMIENTA A ALMACENAR CON UN DISPOSITIVO DE SUJECION ESTANDO EL CARGADOR SOBRE UN ARMAZON DE APOYO . COMPRENDE: DISPONER QUE LA HERRAMIENTA PERMANEZCA CONECTADA CON LOS CONDUCTORES DE ALIMENTACION AL ACABAR DE TRABAJAR; ALMACENAR Y FIJAR LA HERRAMIENTA EN SU POSICION TRAS EL ALMACENAMIENTO Y ANTES DE SEPARAR EL BRAZO DEL ROBOT; DESPRENDER DEL BRAZO DEL ROBOT ; ALOJAR OTRA HERRAMIENTA; Y AJUSTAR EL BRAZO DEL ROBOT ANTES DE PRODUCIRSE UNA UNION RIGIDA.
{kind=link}
{kind=link}
{kind=link}