CIP-2021 : G01S 7/40 : Medios para monitorización o calibración.
CIP-2021 › G › G01 › G01S › G01S 7/00 › G01S 7/40[2] › Medios para monitorización o calibración.
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00.
G01S 7/40 · · Medios para monitorización o calibración.
CIP2021: Invenciones publicadas en esta sección.
Dispositivo de procesamiento de imagen y procedimiento de procesamiento de imagen correspondiente.
(12/02/2020) Dispositivo de procesamiento de imagen caracterizado porque comprende:
- un primer conjunto de sensores de hiperfrecuencias, con preferencia radiométricos, estando cada sensor de hiperfrecuencia configurado para captar radiaciones electromagnéticas emitidas o reflejadas por cuerpos u objetos situados en una zona de detección de dicho sensor de hiperfrecuencia, y
- un medio reflectante configurado para reflejar las radiaciones electromagnéticas que pueden ser captadas por el primer conjunto de sensores de hiperfrecuencias,
- dos medios emisores de referencia,
en el cual el medio reflectante está montado móvil en la zona de detección de cada sensor de hiperfrecuencia, de manera que desplaza dicha zona de detección por desplazamiento del medio reflectante, y en el cual el medio reflectante está…
Geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica usando dos imágenes de SAR de apertura larga.
(20/11/2019) Método para la geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica usando dos imágenes de SAR de apertura larga que proporcionan, cada una, una resolución por debajo de dos metros, que comprende
a) dos adquisiciones de SAR con apertura larga adquiridas con geometría diferente que se proporcionan como entrada en el método,
b) detección de objetivo puntual en ambas imágenes,
c) proporcionar un análisis de desenfoque para todos los objetivos puntuales en ambas imágenes, en el que para cada objetivo puntual se establece una relación entre una altura estimada y un retardo troposférico,
d) se selecciona una de las dos imágenes como imagen maestra y la otra como esclava,
e) después, para cada objetivo puntual…
Medida de calidad de conjunto de frecuencias.
(30/10/2019) Un método para generar una medida de calidad para un conjunto de frecuencias para indicar la calidad de dicho conjunto de frecuencias para su uso en un método de determinación de distancia de múltiples frecuencias, comprendiendo dicho conjunto de frecuencias al menos una frecuencia primaria (F0), una primera frecuencia (F1) y una segunda frecuencia (F2), dicho método de determinación de distancia de múltiples frecuencias es un método para estimar el alcance a un objeto determinando al menos una primera diferencia de fase y una segunda diferencia de fase en una señal de eco reflejada recibida y procesar dicha primera diferencia de fase y dicha segunda diferencia de fase, siendo dicha primera diferencia de fase la diferencia de fase entre la frecuencia primaria (FO') y la primera frecuencia…
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores.
(02/10/2019) Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de al menos dos sensores y al menos una magnitud de movimiento del objeto en movimiento se determina por medio de cada vez uno de los sensores, en donde se recurre conjuntamente al menos a estas magnitudes de movimiento o respectivamente a magnitudes derivadas de ellas para determinar una disposición relativa de los sensores entre sí, caracterizado por que la al menos una magnitud de movimiento determinada por medio de cada vez uno de los sensores comprende al menos la velocidad del objeto en movimiento, al menos con respecto al sensor, y/o se determina…
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado.
(31/07/2019) Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por el sensor de entorno se verifican contra al menos un criterio de verificación que indica un funcionamiento correcto usando al menos un valor de umbral, caracterizado porque mediante un dispositivo de control en función de al menos una información de posición que describe un entorno actual del vehículo motorizado , al menos un valor de umbral del criterio de verificación es adaptado dinámicamente durante la marcha y/o el autodiagnóstico se interrumpe temporalmente, en donde una indicación de localización es detectada mediante un sensor de localización de…
(10/07/2019) Radar meteorológico para medir señales de radar en el rango de GHz con un receptor que contiene al menos una ruta de señal , y que comprende un equipo receptor para una señal de radar entrante , a la que puede superponerse en un acoplador una señal de prueba generada por un generador de señales de prueba , y un equipo de procesamiento para amplificar, filtrar y convertir ambas señales a frecuencias más bajas, estando previsto para el filtrado un filtro adaptado , y con un equipo de evaluación en el que se pueden inferir parámetros de calibración de la ruta de señal para la frecuencia de la señal de prueba a partir de la señal de prueba para determinar la intensidad de la señal de radar recibida , pudiendo…
Linealizador de forma de onda.
(12/06/2019) Una fuente de barrido de frecuencia para un radar FMCW que comprende un sintetizador de frecuencia de bucle de bloqueo de fase, incluyendo el bucle bloqueado en fase:
un oscilador controlado por tensión ;
medios para generar una primera forma de onda de barrido de frecuencia ;
medios para modular el oscilador controlado por tensión con la primera forma de onda de barrido de frecuencia añadida a una señal de corrección de bucle ;
una fuente de frecuencia de referencia para generar una salida de frecuencia de referencia; y
un medio discriminador de frecuencia/fase para generar una tensión de salida que, por medio de un filtro de bucle , forme la señal de corrección de bucle de manera que controle el oscilador controlado por tensión , teniendo el medio discriminador de frecuencia/fase una primera entrada y…
Procedimiento de localización de un blanco y sistema radar multiestático de implementación de tal procedimiento.
(14/03/2019) Procedimiento de localización de un blanco que incluye las siguientes etapas:
a) recibir, por medio de N≥1 receptores (RR1, RR2, RR3), unas señales radioeléctricas de oportunidad (SRE) emitidas por M≥1 emisores (ER) y reflejadas por dicho blanco (C), con N·M≥3, estando dicho o dicho al menos un emisor situado fuera de la vista de dicho o de dicho al menos un receptor;
b) recibir, por medio de un enlace de transmisión de datos (LD), una o varias señales denominadas de referencia, representativas de las señales radioeléctricas emitidas por dicho o cada dicho emisor situado fuera de la vista de dicho o de dicho al menos un receptor; y
c) a partir de dichas señales radioeléctricas y de dicho o de dichas señales de referencia, determinar la posición de dicho blanco;
caracterizado porque…
Medición de distancia mejorada utilizando el tiempo de vuelo de las señales.
(30/10/2018). Ver ilustración. Solicitante/s: KONINKLIJKE PHILIPS N.V. Inventor/es: WIJBRANS,KLAAS CORNELIS JAN.
Un sistema que comprende un primer dispositivo y un segundo dispositivo , estando configurado el primer dispositivo y el segundo dispositivo para realizar una medición de distancia con base en el tiempo de vuelo para medir la distancia entre el primer dispositivo y el segundo dispositivo , en donde la longitud de las señales transmitidas durante la medición de distancia con base en el tiempo de vuelo está determinada de acuerdo con un nivel de precisión requerido para la medición de distancia.
PDF original: ES-2687948_T3.pdf
Extractor de modos TM01 muy compacto.
(21/09/2018) Extractor de modos para extraer un modo TM01 a partir de una señal electromagnética, que comprende una primera unión de torniquete y una segunda unión de torniquete, presentando cada una de las uniones de torniquete un primer puerto , cuatro segundos puertos de guía de ondas rectangular que son mutuamente ortogonales y ortogonales con respecto al primer puerto , y una sección de adaptación proporcionada, al menos parcialmente, en una región central de la unión de torniquete respectiva, estando situada la región central en una intersección del primer puerto y los cuatro segundos puertos ,
en donde la primera unión de torniquete y la segunda unión de torniquete están dispuestas de manera que ejes longitudinales de sus primeros puertos …
Automóvil con sensor ajustable y/o calibrable, sensor y procedimiento para la supervisión del sensor.
(14/03/2018). Solicitante/s: AUDI AG. Inventor/es: MULLER, CHRISTIAN, POLLMER,JENS.
Automóvil , que comprende al menos un sensor ajustables y/o calibrable, que está montado en una posición de montaje fija dentro del automóvil , en el que está prevista una instalación de detección para la detección de una retirada temporal del sensor en el estado sin corriente fuera de la posición de montaje, caracterizado por que está prevista una instalación de control que indicia al menos una medida durante una retirada temporal detectada del sensor fuera de la posición de montaje durante la puesta en servicio del sensor.
PDF original: ES-2665901_T3.pdf
Dispositivo para la vigilancia de un campo de registro.
(01/06/2016) Dispositivo para la vigilancia de un campo de registro , que genera una unidad de sensor (12, 12A) con al menos un primer elemento de sensor , estando dispuesta la unidad de sensor (12, 12A) sobre un soporte de manera que puede hacerse pivotar alrededor de al menos un eje (SA), presentando la unidad de sensor (12, 12A) al menos un segundo elemento de sensor (14, 14A), averiguando y evaluando una unidad de evaluación y de control a partir de una señal de salida del al menos un segundo elemento de sensor (14, 14A) un ángulo de inclinación actual del al menos un primer elemento de sensor , caracterizado por que
el al menos un segundo elemento de sensor (14A) presenta un transmisor de valores medidos y un captador de valores medidos , indicando la señal de salida una posición relativa del captador…
Procedimiento para el calibrado de una unidad de disparo y sensor conectable en cascada correspondiente.
(10/03/2016) Procedimiento para el calibrado de una unidad de disparo , que está conectada mediante una línea de disparo a al menos dos sensores que pueden ser disparados, cada uno de los cuales está conectado entre dos tramos de línea (2a, 2b, 3c) sucesivos de la línea de disparo , presentando cada sensor una entrada para uno y una salida para el otro tramo de línea (2a, 2b, 2c), un disyuntor controlable entre la entrada y la salida y un circuito de control que está conectado a la entrada , que controla el disyuntor , estando inicialmente abiertos los disyuntores de todos los sensores , con las etapas:
emisión de un impulso de disparo de la unidad de disparo a través de al menos un tramo de línea…
Procedimiento para advertir al conductor de un vehículo motorizado de la generación de una situación de peligro como consecuencia de una deriva no intencional a un carril de tránsito en sentido contrario.
(13/05/2015) Procedimiento para advertir al conductor de un vehículo motorizado de la generación de una situación de peligro como consecuencia de una deriva no intencional en sentido de o a un carril de tránsito en sentido contrario, caracterizado por que
- se determina un corredor virtual de circulación dirigido en el sentido de marcha del vehículo motorizado propio,
- usando en particular un sistema de captación, particularmente óptica, se determina una señalización horizontal de calzada que separa el carril propio del carril de tránsito en sentido contrario,
- se determina la posición relativa del vehículo propio respecto de la señalización horizontal de calzada,
- usando…
Sistema de seguimiento por radar.
(09/04/2014) Un sistema de seguimiento por radar , que comprende:
un radar que recibe un haz de energía electromagnética reflejada, donde el radar es un receptor monocanal; y
un sistema de procesamiento de radar acoplado al radar y que puede hacerse funcionar para:
explorar el radar a través de un arco que tiene una longitud angular;
recibir una pluralidad de imágenes de radar procedentes del radar , cada una de la pluralidad de imágenes obtenida en una orientación angular de una pluralidad de orientaciones angulares de una dirección de eje de puntería del haz con respecto a un blanco , presentando el…
Procedimiento y sistema de formación de imágenes radiométrica de síntesis de apertura espacio-temporal.
(08/01/2014) Procedimiento de formación de imágenes radiométrica destinado a cartografiar por lo menos un parámetro característico de objetos distantes dispuestos sobre una superficie y detectable por la radiación electromagnética multiangular emitida por los objetos, utilizando el procedimiento una antena de red formada por unas antenas elementales (A(k)) dispuestas a bordo de por lo menos un satélite móvil con respecto a la superficie, estando el procedimiento caracterizado porque comprende las etapas que consisten en: identificar cada antena elemental (A(k)) por un índice k,
aplicar una indicación de tiempo según una base de tiempos…
Método y dispositivo para la sincronización cronológica de una red de ubicación.
(14/11/2013) Un método para sincronizar cronológicamente, en un sistema para permitir la determinación de la posiciónde un receptor de posición itinerante , una señal de posicionamiento única generada por undispositivo de unidad de posicionamiento en una ubicación conocida a la base de tiempo de untransmisor de referencia que transmite al menos una señal de posicionamiento de referencia ,dicho transmisor de referencia estando en una ubicación conocida diferente de la ubicación conocida dedicho dispositivo de unidad de posicionamiento , dicho dispositivo de unidad de posicionamiento comprendiendo un receptor y un transmisor co-situado , y la señal de posicionamiento de referencia conteniendo información de temporización acerca de dicho transmisor de referencia ,comprendiendo el método las siguientes etapas de dicho dispositivo…
Procedimiento para la determinación de la dirección por medio de la formación de monoimpulsos.
(07/11/2013) Procedimiento la determinación de la dirección por medio de la formación de monoimpulsos en un sistema deradar con antena de grupos controlada electrónicamente y formación analógica del haz de canales de sumas y decanales de diferencias, caracterizado porque se lleva a cabo una auto-prueba de la antena para la identificación deelementos de recepción defectuosos, y el resultado de la auto-prueba es introducido directamente en la formaciónde monoimpulsos para corregir de esta manera los errores, siendo convertido el resultado de la auto-prueba envalores de corrección en forma de una matriz de transformación lineal C y de términos de corrección de desviaciónμx, μy, que independientemente de la dirección de la visión de la antena, son combinados con los de la señal delcanal de suma…
Mejora en la localización de aeronaves mediante un radar primario por la explotación de un radar secundario en modo S.
(07/11/2013) Procedimiento para determinar el error que afecta a la determinación de la posición de aeronaves en vuelo,realizado a partir de los ecos radares retrodifundidos por estas aeronaves, caracterizado porque comprendeprincipalmente:
- una primera etapa de interrogación de una aeronave de referencia durante la cual esta aeronavetransmite su posición geográfica y su altitud; eligiéndose la aeronave de referencia de entre aquellas cuyaposición puede ser calculada a partir de su eco radar y que están equipadas con un transpondedor capaz deintercambiar informaciones en modo S con un radar secundario y de transmitir su posición geográfica y sualtitud a través de dicho canal;
- una segunda etapa de determinación de la posición de la aeronave de referencia a partir de lasmediciones realizadas sobre el eco radar retrodifundido por esta aeronave;
-…
Mejoras de compensación de temperatura en aparato de radar.
(23/10/2013) Aparato de medición de distancias basado en radar que comprende:
un circuito de microondas que comprende un generador de frecuencias que produce una señal defrecuencia de microondas, cuya frecuencia se modula una cantidad determinada mediante una señal demodulación aplicada al generador de frecuencias ,
un sensor de temperatura que obtiene una medición de temperatura de al menos una parte del circuitode microondas y un regulador de frecuencia que está adaptado para regular la frecuencia generadamediante el generador de frecuencias, comprendiendo los medios de regulación de frecuencia uncalentador que está adaptado para calentar el generador de frecuencias una cantidad quedepende del valor de la señal de temperatura compensada, caracterizado porque:
el…
SISTEMA, PROCEDIMIENTO Y PROGRAMA INFORMÁTICO DE CALIBRACIÓN DEL POSICIONAMIENTO DE LOS ESPEJOS EN HELIOSTATOS.
(13/09/2013) Sistema, procedimiento y programa informático de calibración del posicionamiento de los espejos en heliostatos.
La presente invención pertenece al campo de los dispositivos colectores de calor, concretamente a los colectores solares de tipo heliostato en campos solares termoeléctricos con tecnología de torre y más concretamente a un sistema y a un procedimiento de calibración del posicionamiento de los espejos que componen dichos heliostatos en el proceso de montaje de los mismos . El sistema posee un receptor láser posicionable en contacto con un punto de la superficie del espejo a calibrar, un emisor láser para determinar la posición del punto a calibrar, un dispositivo de posicionamiento que alberga el receptor láser , una unidad…
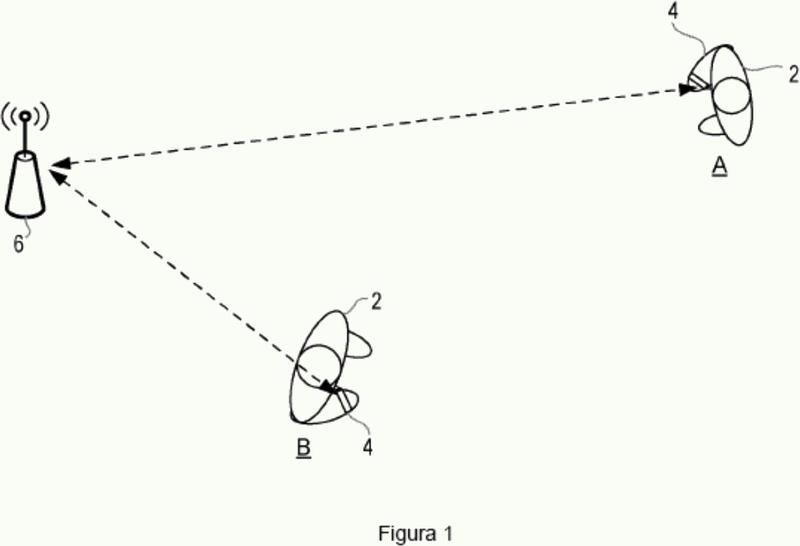
Sistema de respuesta a una señal emitida por un radar y uso de este sistema fundamentalmente para probar los radares, en particular de tipo MTI.
(11/09/2013) Sistema de respuesta a una señal emitida por un radar que comprende:
- una antena (ANT) pasiva adaptada para recibir y a continuación retrodifundir una señal emitida por dichoradar;
- un conmutador (CON) del tipo de microondas conectado a dicha antena;
- al menos dos líneas de microondas (LMO1, LMO2) teniendo, cada una, una impedancia distinta y estandoconectada al conmutador de microondas; y
- un generador (GEN) adaptado para generar una señal de control configurable, en el conmutador demicroondas para que este cambie a una o a la otra de las líneas de microondas, de tal modo que se module laseñal retrodifundida por dicha antena.
caracterizado porque dos líneas sucesivas…
Procedimiento y aparato para generar se;ales de enga;o angular.
(22/08/2012) Un procedimiento para generar y transmitir señales de engaño por medio de un aparato que comprende dosantenas transceptoras que están montadas en una aeronave y son amovibles integralmente conrespecto a un dispositivo de radar de monoimpulsos que emite una señal de impulsos de radar y que recibedichas señales de engaño emitidas por las dos antenas, que comprende las siguientes etapas:
a) adquirir por medio de cada una de las dos antenas la suma vectorial de la señal emitida porel dispositivo de radar de monoimpulsos y la señal correspondiente reflejada por el suelo,
respectivamente;
b) compensar la diferencia en amplitud entre…
Método para la reducción del desenfoque angular en imágenes de radar.
(15/08/2012) Método para la reducción del desenfoque angular debido a la anchura del haz del radar en imágenes de radar logradas en sistemas de detección basados en bins de distancias en los que la amplitud de la potencia S (x) es medida como una función de una posición angular x a una cierta distancia, comprendiendo:
la determinación en cada bin de distancias, en el caso de una serie de posiciones angulares x, de una expresión del tipo
x0 ≥ x + q/c / (rc (1 + q/c) + 1)
ó
x0 ≥ x + (l/d) ·arctan (q/ (2·d) ),
en las que
c es una constante que determina la forma de un polinomio de segundo orden utilizado para realizar la aproximación de la forma del haz,
d es una constante que determina la forma de una…
Dispositivo de alineación para un aparato de radar.
(25/04/2012) Dispositivo de alineación de radar lateral para un aparato de medición de radar lateral con una carcasa que se fija en un objeto fijo con distancia a un subsuelo, que presenta una superficie frontal , cuyo rayo central emitido debe ser emitido en un ángulo de 45º hacia la dirección de desplazamiento de vehículos a medir, presentando el dispositivo de alineación de radar lateral
- un elemento de apoyo , que es conectable de manera desmontable, con su superficie de extensión principal plana que da hacia la carcasa , a la carcasa del aparato de medición de radar lateral de tal manera, que la superficie de extensión principal plana…
PROCEDIMIENTO Y DISPOSITIVO DE EVALUACION DEL DESFASE PERTURBADOR DE LAS SEÑALES DE UN RADAR DE SINTESIS DE APERTURA Y APLICACIONES.
(27/05/2010) LA INVENCION SE REFIERE A UN DISPOSITIVO Y UN PROCEDIMIENTO DE EVALUACION DEL DESFASE PERTURBADOR DE SEÑALES DE RADAR DE SINTESIS DE ABERTURA. SEGUN LA INVENCION, DICHO DISPOSITIVO CONSTA DE: - PRIMEROS SISTEMAS PARA CALCULAR LA DESVIACION TIPO DEL ESPECTRO DE POTENCIA DE LAS SEÑALES DE RADAR; - SEGUNDOS SISTEMAS PARA CALCULAR LA POTENCIA MEDIA DE DICHAS SEÑALES DE RADAR; - TERCEROS SISTEMAS PARA CALCULAR, A PARTIR DE LOS RESULTADOS OBTENIDOS POR LOS PRIMEROS Y SEGUNDOS SISTEMAS , EL CONTRASTE DE UNA IMAGEN DE RADAR, PARA DETERMINAR EL MAXIMO DE DICHO CONTRASTE Y PARA DEDUCIR UN GRADIENTE DOPPLER OPTIMO, REPRESENTATIVO DEL DESFASE PERTURBADOR
DETECTOR DE MOVIMIENTO SEGUN EL PRINCIPIO DOPPLER.
(21/04/2010) Detector de movimiento según el principio Doppler, con un módulo de microondas para la emisión de una señal de microondas a un espacio de supervisión y para la recepción de la radiación reflejada por éste, con una fase de evaluación conectada en el módulo de microondas y con una supervisión de sabotaje del detector, caracterizado porque el módulo de microondas contiene dos receptores distanciados uno del otro, cuya distancia está seleccionada de tal forma que la radiación resida en los dos receptores presenta una diferencia de fases, porque en el caso de detección de un objeto, se determina su dirección de movimiento, y porque para la supervisión de sabotaje se…
SISTEMA Y PROCEDIMIENTO DE NAVEGACION DE UN VEHICULO.
(16/11/2009) Un sistema de navegación de un vehículo conforme al contorno de una región de la superficie sobre la que se mueve, que comprende a bordo del vehículo un altímetro radar adaptado para enviar señales descendentes hacia dicha región de la superficie y para analizar las señales reflejadas desde la misma para medir la altura sobre la parte de la región de la superficie que se acaba de pasar, una base de datos con información acerca de la altitud de la región de la superficie dentro del área en la que está presente el vehículo y un dispositivo que tiene un medio adaptado para comparar la altitud de la región de la superficie medida en último lugar con la información de la base de datos acerca de las altitudes de la región de la superficie dentro de un área de incertidumbre dada y formar un entorno de medición que…
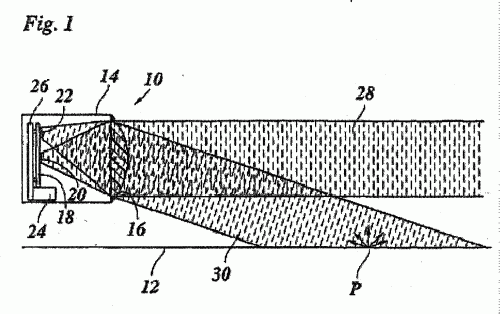
SENSOR DE RADAR PARA VEHICULOS CON UN LOBULO LATERAL DE ANTENA DIRIGIDO A LA SUPERFICIE DE LA CALZADA.
(01/03/2007). Ver ilustración. Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: BEEZ, THOMAS, LEHRE, KLAUS.
Sensor de radar para vehículos, con un dispositivo de emisión y recepción cuya característica direccional presenta varios lóbulos de los cuales al menos un lóbulo está orientado paralelo a la superficie de calzada y que se genera por una de tres antenas de parche, estando dispuestas las tres antenas de parche de manera adyacente en una línea horizontal que discurre paralela a la superficie de calzada, caracterizado porque al menos otro lóbulo está orientado de manera oblicua a la superficie de calzada, que se genera por otra antena de parte que se dispone fuera de la línea horizontal de manera que se dispone fuera de las tres antenas de parche.
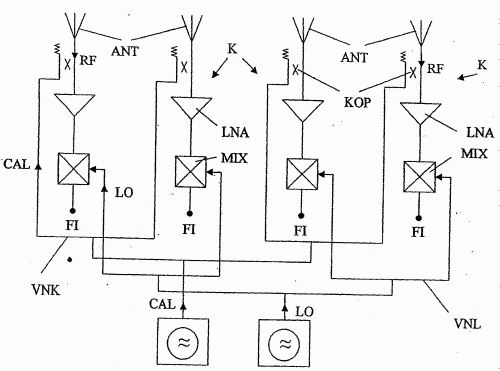
AGRUPACION DE ANTENAS DE RECEPCION ACTIVAS.
(16/05/2006). Ver ilustración. Solicitante/s: EADS DEUTSCHLAND GMBH. Inventor/es: SOLBACH, KLAUS, PROF. DR.
Agrupación de antenas de recepción con una pluralidad de canales para convertir señales de recepción de elementos de antena de recepción (ANT) en una señal de frecuencia intermedia (FI) por medio de un circuito que comprende uno o más preamplificadores (LNA) y un mezclador (MIX) conectado en serie, alimentándose al circuito una señal de oscilador (LO) y una señal de calibración (CAL) centralmente generadas, caracterizada porque está presente una red distribuidora (VNG) común para la señal de oscilador local (LO) y la señal de calibración (CAL) centrales, la cual está conexionada de tal manera que la señal de oscilador local central (LO) y la señal de calibración central (CAL) se acoplan al circuito a la salida del elemento de antena de recepción (ANT).
SISTEMA PARA EVALUAR LAS SEÑALES DEL CODIFICADOR DE POSICION DE UN RADAR.
(01/04/2006). Solicitante/s: TELECOMUNICACION, ELECTRONICA Y CONMUTACION, S.A. (TECOSA). Inventor/es: TRAPERO CASTILLO,ANDRES.
El sistema para evaluar las señales del codificador de posición de un radar es un dispositivo autónomo, que monitoriza, mide y evalúa, de forma continua y en tiempo real, los pulsos procedentes del codificador de posición de la antena de un radar. Esta medición se realiza contabilizando mediante circuitos lógicos el número de pulsos generados por un oscilador patrón contenidos en los semiperiodos de los pulsos procedentes del codificador de posición de antena a lo largo de un ciclo completo. Entre otras, una de las aplicaciones sería comparar los valores reales obtenidos con los valores teóricos esperados y estableciendo un perfil de las desviaciones permitidas evaluar el estado de los pulsos generados por el codificador de posición y alertar cuando el sistema de giro o de codificación deben ser revisados.
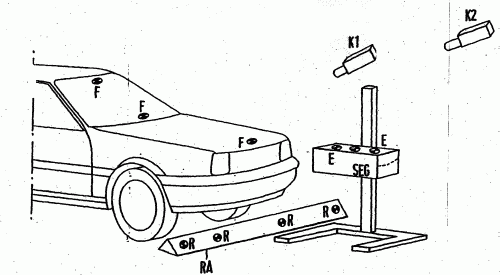
APARATO DE AJUSTE PARA FAROS O SENSOR DE DISTANCIA DE UN VEHICULO CON ALINEACION CON RELACION AL EJE DE ARRANQUE.
(01/08/2005). Ver ilustración. Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: NOBIS, GUENTER, ADOLPH, DIETRICH, REMMELE, WALTER.
Dispositivo de ajuste con un aparato de ajuste (SEG) para faros o para un sensor de distancia de un vehículo y con una instalación de ajuste óptica (K1, K2, F, R, E) para la alineación del aparato de ajuste (SEG) con relación al vehículo, caracterizado porque la instalación de ajuste (K1, K2, F, R, E) presenta una instalación de evaluación y está configurada para la determinación de la dirección del eje de la marcha durante el arranque del vehículo y presenta medios (E) para la alineación del aparato de ajuste (SEG) con relación de la dirección del eje de la marcha.
{kind=link}
{kind=link}
{kind=link}
{kind=link}