DETECTOR DE MOVIMIENTO SEGUN EL PRINCIPIO DOPPLER.
Detector de movimiento según el principio Doppler, con un módulo de microondas (1) para la emisión de una señal de microondas a un espacio de supervisión y para la recepción de la radiación reflejada por éste,
con una fase de evaluación (3) conectada en el módulo de microondas (1) y con una supervisión de sabotaje del detector, caracterizado porque el módulo de microondas (1) contiene dos receptores distanciados uno del otro, cuya distancia está seleccionada de tal forma que la radiación resida en los dos receptores presenta una diferencia de fases, porque en el caso de detección de un objeto, se determina su dirección de movimiento, y porque para la supervisión de sabotaje se lleva a cabo un análisis (4) del desarrollo del al menos otro parámetro de la señal de recepción en función de la dirección del movimiento, de manera que el análisis (4) se realiza a través de la comparación de al menos otro parámetro con el desarrollo de un evento predeterminado y porque la determinación de la dirección del movimiento se realiza con la ayuda del signo (d) de la diferencia de fases entre las señales de recepción de los dos receptores y porque el módulo de microondas (1) y la fase de evaluación (3) forman parte de un primer detector (M) de un detector doble, que contiene, además, un segundo detector, con preferencia un detector pasivo de infrarrojos (PIR), y porque las señales del primer detector y las señales del segundo detector (M y PIR) son alimentadas a una fase de análisis común (4), en la que se realiza un enlace de las señales mencionadas
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E00112465.
Solicitante: SIEMENS BUILDING TECHNOLOGIES AG.
Nacionalidad solicitante: Suiza.
Dirección: BELLERIVESTRASSE 36,8034 ZURICH.
Inventor/es: HEGNAUER, STEFAN, SIEGWART, DAVID.
Fecha de Publicación: .
Fecha Solicitud PCT: 10 de Junio de 2000.
Fecha Concesión Europea: 23 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- G01S13/56 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para la detección de presencia.
- G01S7/40 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Medios para monitorización o calibración.
- G08B13/24C
Clasificación PCT:
- G01S13/56 G01S 13/00 […] › para la detección de presencia.
- G01S7/40 G01S 7/00 […] › Medios para monitorización o calibración.
- G08B29/04 G […] › G08 SEÑALIZACION. › G08B SISTEMAS DE SEÑALIZACION O DE LLAMADA; TRANSMISORES TELEGRAFICOS DE ORDENES; SISTEMAS DE ALARMA. › G08B 29/00 Verificación o control de sistemas de señalización de alarma; Prevención o corrección de errores de funcionamiento, p. ej. que impiden el accionamiento no autorizado. › Vigilancia de los circuitos detectores.
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Detector de movimiento según el principio Doppler.
La invención se refiere a un detector de movimiento según el principio Doppler, con un módulo de microondas para la emisión de una señal de microondas a un espacio de supervisión y para la recepción de la radiación reflejada por éste, con una fase de evaluación conectada en el módulo de microondas y con una supervisión de sabotaje del detector.
Tales supervisiones de sabotaje, que se designan también como instalaciones antimáscara y que sirven para la determinación de manipulaciones en el detector o en su proximidad inmediata, como por ejemplo cobertura del detector por medio de un cartón o una lámina, están muy extendidas, en efecto, en detectores pasivos de infrarrojos, pero prácticamente no se emplean en detectores de microondas. Uno de los pocos detectores de microondas con una instalación antimáscara se describe en el documento EP-A-0 870 287. En este detector, la señal recibida desde el módulo de microondas atraviesa un amplificador de dos fases y es captada en la salida de cada fase del amplificador. Tan pronto como en la salida de la primera fase del amplificador está presente una señal, que indica la detección de un evento en la zona próxima de la alarma, se inicia un intervalo de tiempo de algunos segundos. Cuando dentro de este intervalo de tiempo no se produce ninguna detección de otro evento, se activa una señal de sabotaje.
En esta instalación de antimáscara, la decisión de si ha tenido lugar un evento en la proximidad del detector y, por lo tanto, podría representar una manipulación en el detector, se toma únicamente con la ayuda de la amplitud de la señal de recepción. Pero puesto que la amplitud no sólo es una medida de la distancia de un objeto con respecto al detector, sino también de su factor de reflexión, no se garantiza que una señal, cuya amplitud corresponde a un evento a corta distancia del detector, sea activada realmente por una manipulación en el detector y no, por ejemplo, por un objeto que refleja fuertemente a mayor distancia del detector.
A través de la invención debe indicarse ahora un detector de movimiento del tipo mencionado al principio, cuya supervisión de sabotaje funciona de manera unívoca y fiable.
El cometido se define a través de las características de la reivindicación 1.
Este cometido se soluciona de acuerdo con la invención porque el módulo de microondas contiene dos receptores distanciados uno del otro, cuya distancia está seleccionada de tal forma que la radiación resida en los dos receptores presenta una diferencia de fases, porque en el caso de detección de un objeto, se determina su dirección de movimiento, y porque para la supervisión de sabotaje se lleva a cabo un análisis del desarrollo del al menos otro parámetro de la señal de recepción en función de la dirección del movimiento.
El detector de movimiento de acuerdo con la invención se caracteriza porque el análisis mencionado se realiza a través de la comparación del al menos otro parámetro con el desarrollo de un evento predeterminado.
El detector de movimiento de acuerdo con la invención dispone de una supervisión de sabotaje, en la que partiendo de la dirección del movimiento de un objeto detectado, se investigan otros parámetros de las señales, para determinar si su valor y/o su desarrollo son típicos de una cobertura del detector (enmascaramiento). Esta supervisión del sabotaje tiene la ventaja de que es independiente del material del objeto de reflexión. Además, no se requieren elementos de circuito adicionales y se lleva a cabo exclusivamente en el marco de la evaluación de la señal de recepción.
El detector de movimiento de acuerdo con la invención se caracteriza porque la determinación de la dirección del movimiento se realiza con la ayuda del signo de la diferencia de fases entre las señales de recepción de los dos receptores y porque el módulo de microondas y la fase de evaluación forman parte de un primer detector de un detector doble, que contiene, además, un segundo detector, con preferencia un detector pasivo de infrarrojos, y porque las señales del primer detector y las señales del segundo detector son alimentadas a una fase de análisis común, en la que se realiza un enlace de las señales mencionadas.
Una primera forma de realización preferida se caracteriza porque el al menos otro parámetro está formado por la señal de reposo de la señal recibida y porque se analiza la modificación de la señal de reposo.
Una segunda forma de realización preferida del detector de movimiento de acuerdo con la invención se caracteriza porque el al menos otro parámetro está formado por la distancia de los objetos detectados en la zona próxima.
Una tercera forma de realización preferida del detector de movimiento de acuerdo con la invención se caracteriza porque el al menos otro parámetro está formado por la amplitud de la señal recibida.
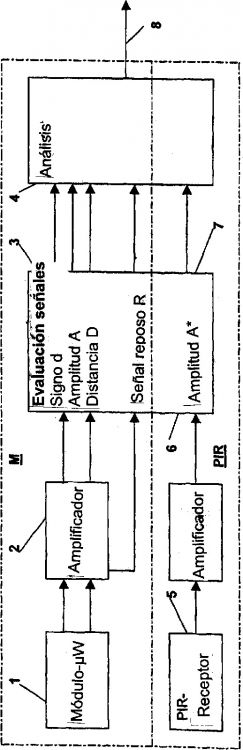
A continuación se explica en detalle la invención con la ayuda de un ejemplo de realización representado en el dibujo único. Éste muestra un esquema de bloques de un detector de microondas de acuerdo con la invención y su evaluación de la señal para la supervisión de sabotaje. El detector de microondas puede estar combinado con un detector pasivo de infrarrojos para formar un detector doble.
El detector de microondas designado con el signo de referencia M contiene un módulo de microondas 1 para la emisión y para la recepción de microondas, un amplificador 2 conectado a continuación del módulo de microondas 1, una fase de evaluación 3 y una fase de análisis 4, en cuya salida se puede obtener una señal de sabotaje. En caso de detección de un intruso, el detector de microondas suministra evidentemente una señal de alarma, cuya obtención no forma, sin embargo, un objeto de la presente invención. En este contexto se remite a los documentos US-A-4 697 184, EP-A-0 870 287 y a la solicitud de patente europea 00 112 885.1 de la Solicitante de la presente solicitud de patente.
El módulo de microondas 1 contiene un emisor y dos receptores distanciados uno del otro, que están posicionados de tal forma que la radiación reflejada recibida por ellos presenta una diferencia de fases
La suma de todas las señales recibidas se designa como señal de reposo. Esta suma de las señales recibidas es amplificada relativamente poco, de manera que la señal de reposo solamente está influenciada claramente por objetos en la zona próxima. De esta manera, a través de una supervisión de modificaciones de la señal de reposo se puede determinar la penetración de un objeto así como la permanencia del objeto de la zona próxima del detector. La amplitud, que representa una medida aproximada para la distancia D de un objeto con respecto al detector, o la intensidad de la señal A de la señal de recepción, que tiene aproximadamente la misma magnitud den ambos receptores, se obtiene directamente a través de la integración de los importes de las señales.
Para una determinación exacta de la distancia se puede modificar el módulo de microondas 1 de tal manera que su emisor emite dos frecuencias diferentes, que presentan durante la recepción primeras y segunda señales Doppler con una diferencia de fases proporcional a la distancia del objeto. Tal módulo de microondas se describe en la solicitud de patente europea 99 112 885.1, a la que se hace aquí referencia expresa. En esta solicitud de patente se describe que en el caso de utilización de dos o más frecuencias de emisión fijas en un radar Doppler, las señales Doppler correspondientes en la salida de la mezcladora de recepción...
Reivindicaciones:
1. Detector de movimiento según el principio Doppler, con un módulo de microondas (1) para la emisión de una señal de microondas a un espacio de supervisión y para la recepción de la radiación reflejada por éste, con una fase de evaluación (3) conectada en el módulo de microondas (1) y con una supervisión de sabotaje del detector, caracterizado porque el módulo de microondas (1) contiene dos receptores distanciados uno del otro, cuya distancia está seleccionada de tal forma que la radiación resida en los dos receptores presenta una diferencia de fases, porque en el caso de detección de un objeto, se determina su dirección de movimiento, y porque para la supervisión de sabotaje se lleva a cabo un análisis (4) del desarrollo del al menos otro parámetro de la señal de recepción en función de la dirección del movimiento, de manera que el análisis (4) se realiza a través de la comparación de al menos otro parámetro con el desarrollo de un evento predeterminado y porque la determinación de la dirección del movimiento se realiza con la ayuda del signo (d) de la diferencia de fases entre las señales de recepción de los dos receptores y porque el módulo de microondas (1) y la fase de evaluación (3) forman parte de un primer detector (M) de un detector doble, que contiene, además, un segundo detector, con preferencia un detector pasivo de infrarrojos (PIR), y porque las señales del primer detector y las señales del segundo detector (M y PIR) son alimentadas a una fase de análisis común (4), en la que se realiza un enlace de las señales mencionadas.
2. Detector de movimiento de acuerdo con la reivindicación 1, caracterizado porque el al menos otro parámetro está formado por la señal de reposo (R) de la señal recibida y porque se analiza la modificación de la señal de reposo (R).
3. Detector de movimiento de acuerdo con la reivindicación 1, caracterizado porque la señal de reposo (R) corresponde a la suma de todas las señales recibidas.
4. Detector de movimiento de acuerdo con una de las reivindicaciones 1 a 3, caracterizado porque el al menos otro parámetro está formado por la distancia (D) de los objetos detectados en la zona próxima.
5. Detector de movimiento de acuerdo con la reivindicación 4, caracterizado porque para la determinación de la distancia (D), el módulo de microondas (1) está configurado de tal forma que emite al menos dos frecuentes diferentes, que presentan en los receptores primeras y segundas señales Doppler con una diferencia de fases proporcional a la distancia (D) de un objeto.
6. Detector de movimiento de acuerdo con una de las reivindicaciones 1 a 5, caracterizado porque el al menos otro parámetro está formado por la amplitud (A) de la señal recibida.
Patentes similares o relacionadas:
Dispositivo de procesamiento de imagen y procedimiento de procesamiento de imagen correspondiente, del 12 de Febrero de 2020, de Microwave Characterization Center: Dispositivo de procesamiento de imagen caracterizado porque comprende: - un primer conjunto de sensores de hiperfrecuencias, con preferencia radiométricos, estando […]
Geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica usando dos imágenes de SAR de apertura larga, del 20 de Noviembre de 2019, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Método para la geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica […]
 Medida de calidad de conjunto de frecuencias, del 30 de Octubre de 2019, de Weibel Scientific A/S: Un método para generar una medida de calidad para un conjunto de frecuencias para indicar la calidad de dicho conjunto de frecuencias para […]
Medida de calidad de conjunto de frecuencias, del 30 de Octubre de 2019, de Weibel Scientific A/S: Un método para generar una medida de calidad para un conjunto de frecuencias para indicar la calidad de dicho conjunto de frecuencias para […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado, del 31 de Julio de 2019, de AUDI AG: Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por […]
Radar meteorológico, del 10 de Julio de 2019, de LEONARDO Germany GmbH: Radar meteorológico para medir señales de radar en el rango de GHz con un receptor que contiene al menos una ruta de señal , y que comprende un […]
Linealizador de forma de onda, del 12 de Junio de 2019, de MBDA UK LIMITED: Una fuente de barrido de frecuencia para un radar FMCW que comprende un sintetizador de frecuencia de bucle de bloqueo de fase, incluyendo el bucle bloqueado […]
Procedimiento de localización de un blanco y sistema radar multiestático de implementación de tal procedimiento, del 14 de Marzo de 2019, de THALES: Procedimiento de localización de un blanco que incluye las siguientes etapas: a) recibir, por medio de N≥1 receptores (RR1, RR2, RR3), […]