SISTEMA, PROCEDIMIENTO Y PROGRAMA INFORMÁTICO DE CALIBRACIÓN DEL POSICIONAMIENTO DE LOS ESPEJOS EN HELIOSTATOS.
Sistema, procedimiento y programa informático de calibración del posicionamiento de los espejos en heliostatos.
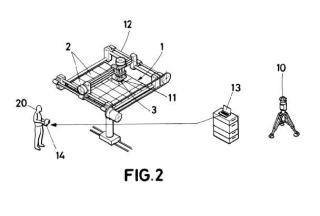
La presente invención pertenece al campo de los dispositivos colectores de calor, concretamente a los colectores solares de tipo heliostato (1) en campos solares termoeléctricos con tecnología de torre y más concretamente a un sistema y a un procedimiento de calibración del posicionamiento de los espejos (2) que componen dichos heliostatos (1) en el proceso de montaje de los mismos (1). El sistema posee un receptor láser (11) posicionable en contacto con un punto (3) de la superficie del espejo (2) a calibrar, un emisor láser (10) para determinar la posición del punto (3) a calibrar, un dispositivo de posicionamiento (12) que alberga el receptor láser (11), una unidad de control (13) y un interfaz (14).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230364.
Solicitante: INGEMETAL ENERGIAS, S.A.
Nacionalidad solicitante: España.
Inventor/es: COLLADO HERNÁNDEZ,JAVIER, GRACIA GRIJOTA,Joaquin, FORT I COMAPOSADA,Jordi.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S7/40 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Medios para monitorización o calibración.
- G05D3/12 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 3/00 Control de la posición o de la dirección (G05D 1/00 tiene prioridad; control de programa numérico G05B 19/18). › utilizando realimentación.
- G06F3/0346 G […] › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 3/00 Disposiciones de entrada para la transferencia de datos destinados a ser procesados en una forma utilizable por el computador; Disposiciones de salida para la transferencia de datos desde la unidad de procesamiento a la unidad de salida, p. ej. disposiciones de interfaz. › con la detección de la orientación del dispositivo o circulación libre en un espacio 3D, p. ej. ratones 3D, 6-DOF [seis grados de libertad] punteros que utilizando giroscopios, acelerómetros o sensores de inclinación.
- H01L31/052 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01L DISPOSITIVOS SEMICONDUCTORES; DISPOSITIVOS ELECTRICOS DE ESTADO SOLIDO NO PREVISTOS EN OTRO LUGAR (utilización de dispositivos semiconductores para medida G01; resistencias en general H01C; imanes, inductancias, transformadores H01F; condensadores en general H01G; dispositivos electrolíticos H01G 9/00; pilas, acumuladores H01M; guías de ondas, resonadores o líneas del tipo guía de ondas H01P; conectadores de líneas, colectores de corriente H01R; dispositivos de emisión estimulada H01S; resonadores electromecánicos H03H; altavoces, micrófonos, cabezas de lectura para gramófonos o transductores acústicos electromecánicos análogos H04R; fuentes de luz eléctricas en general H05B; circuitos impresos, circuitos híbridos, envolturas o detalles de construcción de aparatos eléctricos, fabricación de conjuntos de componentes eléctricos H05K; empleo de dispositivos semiconductores en circuitos que tienen una aplicación particular, ver la subclase relativa a la aplicación). › H01L 31/00 Dispositivos semiconductores sensibles a la radiación infrarroja, a la luz, a la radiación electromagnética de ondas más cortas, o a la radiación corpuscular, y adaptados bien para la conversión de la energía de tales radiaciones en energía eléctrica, o bien para el control de la energía eléctrica por dicha radiación; Procesos o aparatos especialmente adaptados a la fabricación o el tratamiento de estos dispositivos o de sus partes constitutivas; Sus detalles (H01L 51/42 tiene prioridad; dispositivos consistentes en una pluralidad de componentes de estado sólido formados en o sobre un sustrato común, diferentes a las combinaciones de componentes sensibles a la radiación con una o varias fuentes de luz eléctrica H01L 27/00). › Medios de refrigeración directamente asociados o integrados con la célula fotovoltaica, p. ej. elementos Peltier integrados para la refrigeración activa o disipadores de calor directamente asociados con las células fotovoltaicas (medios de refrigeración en combinación con el módulo fotovoltaico H02S 40/42).
Fragmento de la descripción:
Sistema, procedimiento y programa informático de calibración del posicionamiento de los espejos en heliostatos
OBJETO DE LA INVENCIÓN
La presente invención pertenece al campo de los dispositivos colectores de calor, concretamente a los colectores solares de tipo heliostato en campos solares termoeléctricos con tecnología de torre y más concretamente a un sistema, a un procedimiento y a un programa informático de calibración del posicionamiento de los espejos que componen dichos heliostatos durante el proceso de montaje de los mismos.
ANTECEDENTES DE LA INVENCIÓN
Cada heliostato para centrales termosolares de torre, está formado por una pluralidad de superficies reflectantes, normalmente espejos, que reflejan los rayos solares hacia un foco situado en una torre central. Un mecanismo de accionamiento permite el posicionamiento acimutal y de elevación del heliostato y por lo tanto de sus espejos. Se entiende por ángulo acimutal como el ángulo medido sobre el plano de proyección de la superficie terrestre y referenciado al norte geográfico. Se entiende por ángulo de elevación como el ángulo medido sobre el plano horizontal
o plano de proyección a la superficie terrestre.
Un primer mecanismo de accionamiento permite el posicionamiento en ángulo de elevación del heliostato, así como de un tubo de torsión sobre el que se localizan unas vigas transversales y longitudinales de soporte de los espejos y un segundo mecanismo de accionamiento permite el posicionamiento en ángulo acimutal del heliostato rotando sobre un pedestal al que se fija y que se prolonga hasta el suelo.
Los anteriores componentes son ensamblados en una línea de montaje y es durante el ensamblaje de los mismos cuando se realiza la calibración del posicionamiento de cada uno de los espejos que conforman el mismo, ya que cada heliostato debe tener los espejos orientados según la posición que ocupe respecto a la torre central.
El mencionado procedimiento de ensamblaje de los heliostatos se realiza en naves de ensamblaje. Estas naves poseen una serie de puestos de montaje en los que se realiza el ensamblaje de cada uno de los anteriores elementos que lo componen y en los procedimientos de montaje conocidos, unos puentes-grúa desplazan el heliostato entre cada uno de los puestos de montaje.
Son conocidos en el estado de la técnica los sistemas y procedimientos de posicionamiento de heliostatos que comprenden un láser emisor de un impulso óptico. El impulso se refleja en un objeto y es devuelto al emisor del sistema. Un contador de alta velocidad mide el tiempo de respuesta del impulso y dicha medida se convierte en una distancia con el objeto de definir si el posicionamiento de cada espejo es el correcto y corregir su posición en caso necesario. Esta medición se realiza a lo largo de un intervalo de tiempo en el que se mide la distancia de todos los puntos que tienen que ser calibrados. Los valores obtenidos son enviados a una unidad de control del sistema que calcula aquellos puntos que no están en la posición ideal y cuya posición por lo tanto hay que modificar. Posteriormente, un operario realiza de forma manual el posicionamiento de cada uno de los puntos de aquellos espejos cuya posición no se corresponde con la ideal y de nuevo se realiza el proceso anterior, es decir, se vuelve a realizar la medición de la totalidad de los puntos de los espejos del heliostato, repitiéndose la medición normalmente un par de ocasiones más hasta que finalmente todos los puntos están calibrados. En total pueden emplearse unos 45 minutos para la calibración de cada uno de los heliostatos.
Normalmente la medición se realiza con sistemas denominados comercialmente como láser radar que son los encargados de calcular la distancia entre el punto emisor y el punto a medir. Estos sistemas comprenden un emisor láser que emite un rayo láser, que se refleja en la superficie a medir. Estos sistemas tienen la desventaja en su uso en heliostatos de que para permitir la anterior reflexión del rayo emitido, la superficie de los espejos debe ser previamente tratada mediante la pulverización sobre la misma de un producto que la haga opaca para poder reflejar el haz emitido. Otra de las desventajas que poseen es que el tiempo de calibración por cada heliostato es elevado según lo indicado anteriormente.
Son también conocidos otros sistemas de medición, empleados por ejemplo en la medición del posicionamiento de la parábola de colectores cilindro-parabólicos. Estos sistemas comprenden un emisor láser y además un receptor de dicho emisor láser que se sitúa sobre el punto cuya posición se quiere medir. Un operario sitúa manualmente el receptor en los mencionados puntos y el sistema de medición comunica con un una unidad de procesamiento el dato medido. Sin embargo, el objeto de la medición en los receptores cilindro-parabólicos no es de la calibración de los puntos de la parábola, sino el de realizar un control de calidad, ya que el posicionado y calibración de los colectores se realiza con otros medios.
DESCRIPCIÓN DE LA INVENCIÓN
El sistema objeto de la invención para la calibración del posicionamiento de los espejos de heliostatos se caracteriza porque comprende:
- un receptor láser posicionable en contacto con un punto de la superficie del espejo a calibrar y desplazable con el espejo para seguir el movimiento del mismo,
- un emisor láser destinado a emitir un haz hacia el receptor láser para determinar la posición del mismo y por tanto, del punto del espejo a calibrar con el que el receptor está destinado a estar en contacto,
- un dispositivo de posicionamiento que alberga el receptor láser, destinado al posicionamiento del receptor láser sobre el punto de la superficie del espejo a calibrar,
- una unidad de control:
- un interfaz conectable a la unidad de control para mostrar dicha desviación cenital.
Se entiende por cenital la coordenada vertical Z en un sistema de coordenadas cartesiano y por acimutales a las coordenadas horizontales X e Y.
De esta manera los anteriores elementos que componen el sistema están configurados de modo que la actuación sobre el espejo a ajustar cenitalmente, es decir, en coordenada Z medida en el punto de la superficie del espejo con el valor de coordenadas acimutales de referencia, desplaza el receptor láser, recibiendo la unidad de control un nuevo valor medido por el sistema de medición, trasmitiendo al interfaz una nueva desviación cenital. De este modo, el operario que está encargado de mover el espejo para ajustar cenitalmente el punto del espejo a calibrar, recibe en el interfaz en tiempo real el ajuste que debe realizar y las consecuencias que las variaciones en la posición cenital del espejo tienen sobre dicha desviación. Una vez que la desviación cenital entre el valor medido y el valor de referencia, tolerancia de posicionamiento, es inferior a un valor predeterminado, cercano a cero, ha terminado la calibración. Esto permite un ajuste rápido y fiable del punto a calibrar.
Una vez que el primer punto a calibrar ha sido ajustado, la unidad de control transmite al dispositivo de posicionamiento la posición acimutal de referencia de un segundo punto de la superficie del espejo a calibrar, repitiendo la secuencia anteriormente descrita.
El sistema anteriormente descrito posee entre otras ventajas que no es necesario que la superficie reflectante sea opaca y por lo tanto no es necesaria la utilización de un producto de pulverización que logre dicho objetivo. Esto es debido a la utilización de un sistema de medición que comprende un receptor que al situarse en contacto con el punto de la superficie del espejo cuya posición se desea medir permite recibir directamente el haz láser emitido.
Otra de las ventajas que posee el sistema objeto de la invención es que al calibrar punto a punto es posible que mientras un operario realiza la calibración de un segundo punto, en el primer punto ya calibrado, otro operario está realizado el apriete de la posición ya calibrada. Sin embargo, en sistemas y procedimientos en los que se realiza...
Reivindicaciones:
1. Sistema de calibración del posicionamiento de los espejos (2) en heliostatos (1) , caracterizado porque comprende:
- un receptor láser (11) posicionable en contacto con un punto (3) de la superficie del espejo (2) a calibrar y desplazable con el espejo (2) para seguir el movimiento del mismo (2) ,
- un emisor láser (10) destinado a emitir un haz hacia el receptor láser (3) para determinar la posición del mismo (11) y del punto (3) del espejo (2) a calibrar en cada posición ocupada por el espejo (2) ,
- un dispositivo de posicionamiento (12) que alberga el receptor láser (11) , destinado al posicionamiento del receptor láser (11) sobre el punto (3) de la superficie del espejo (2) a calibrar,
- una unidad de control (13) :
- un interfaz (14) conectable a la unidad de control (13) para mostrar dicha desviación cenital.
2. Sistema de calibración del posicionamiento de los espejos (2) en heliostatos (1) , según la reivindicación 1, caracterizado porque el emisor láser (10) comprende medios de desplazamiento y orientación para focalizar el haz hacia la posición del receptor láser (11) .
3. Sistema de calibración del posicionamiento de los espejos (2) en heliostatos (1) , según la reivindicación 1, caracterizado porque el dispositivo de posicionamiento (12) comprende medios para su desplazamiento en los tres ejes cartesianos.
4. Procedimiento de calibración del posicionamiento de los espejos (2) en heliostatos (1) , caracterizado porque comprende los siguientes pasos ejecutables por el sistema de calibración descrito en una cualquiera de las reivindicaciones 1 a 3:
- transmisión de la unidad de control (13) al dispositivo de posicionamiento (12) del valor de referencia de la posición de un punto (3) a calibrar de la superficie de los espejos (2) ,
- posicionamiento del receptor láser (11) sobre el punto (3) a calibrar,
- emisión de un haz del emisor láser (10) al receptor láser (11) para la medición del valor de la posición del punto (3) de la superficie de los espejos (2) ,
- recepción en la unidad de control (13) del valor medido por el emisor láser (10) del punto (3) a calibrar,
- cálculo en la unidad de control (13) de la desviación cenital entre el valor cenital medido y el valor cenital de referencia,
- transmisión de la unidad de control (13) al interfaz (14) de dicha desviación cenital,
- ajuste del espejo (2) según el valor de la desviación cenital recibido en el interfaz (14) hasta conseguir una desviación cenital recibida en el interfaz (14) inferior a un valor predeterminado,
- repetición de los pasos anteriores en los siguientes puntos de calibración de los espejos (2) del heliostato (1) .
5. Procedimiento de calibración del posicionamiento de los espejos (2) en heliostatos (1) , según la reivindicación 4, caracterizado porque previamente la unidad de control (13) transmite a un mecanismo de accionamiento los ángulos acimutal y de elevación de la posición de una estructura soporte de los espejos (2) del heliostato (1) el replegado de la misma a un plano de referencia.
6. Procedimiento de calibración del posicionamiento de los espejos (2) en heliostatos (1) , según la reivindicación 5, caracterizado porque el receptor láser (11) es una superficie esférica.
7. Procedimiento de calibración del posicionamiento de los espejos (2) en heliostatos (1) , según la reivindicación 6, caracterizado porque la unidad de control (13) realiza el paso de descontar la distancia entre el centro geométrico de la superficie esférica y la superficie del espejo (2) donde se apoya.
8. Programa informático de calibración del posicionamiento de los espejos (2) en heliostatos (1) , que comprende un código de programa legible por ordenador y ejecutable por un sistema de procesamiento de datos configurado para realizar el siguiente procedimiento en la unidad de control (13) del sistema descrito en una cualquiera de las reivindicaciones 1 a 3:
- transmisión al dispositivo de posicionamiento (12) del valor de referencia de la posición de un punto (3) a calibrar de la superficie de los espejos (2) ,
- transmisión al emisor láser (10) de una orden de emisión de un haz para la medición del valor de la posición del punto (3) de la superficie de los espejos (2) ,
- recepción del valor medido por el emisor láser (10) del punto (3) a calibrar,
- cálculo de la desviación cenital entre el valor cenital medido y el valor cenital de referencia, 5 -transmisión al interfaz (14) de dicha desviación cenital,
- recepción de un valor ajustado medido por el emisor láser (10) procedente de la actuación sobre la posición cenital del punto (3) a calibrar, con el objeto de conseguir una desviación cenital mostrada por el interfaz (14) inferior a un valor predeterminado,
- transmisión al dispositivo de posicionamiento (12) del valor de referencia de un segundo punto de calibración
sobre la superficie de los espejos (12) , cuando la desviación cenital entre el valor medido y el valor de referencia del primer punto (3) sea inferior al valor predeterminado,
- repetición de los pasos anteriores hasta completar todos los puntos a calibrar.
Patentes similares o relacionadas:
Dispositivo de procesamiento de imagen y procedimiento de procesamiento de imagen correspondiente, del 12 de Febrero de 2020, de Microwave Characterization Center: Dispositivo de procesamiento de imagen caracterizado porque comprende: - un primer conjunto de sensores de hiperfrecuencias, con preferencia radiométricos, estando […]
Geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica usando dos imágenes de SAR de apertura larga, del 20 de Noviembre de 2019, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Método para la geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica […]
 Medida de calidad de conjunto de frecuencias, del 30 de Octubre de 2019, de Weibel Scientific A/S: Un método para generar una medida de calidad para un conjunto de frecuencias para indicar la calidad de dicho conjunto de frecuencias para […]
Medida de calidad de conjunto de frecuencias, del 30 de Octubre de 2019, de Weibel Scientific A/S: Un método para generar una medida de calidad para un conjunto de frecuencias para indicar la calidad de dicho conjunto de frecuencias para […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado, del 31 de Julio de 2019, de AUDI AG: Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por […]
Radar meteorológico, del 10 de Julio de 2019, de LEONARDO Germany GmbH: Radar meteorológico para medir señales de radar en el rango de GHz con un receptor que contiene al menos una ruta de señal , y que comprende un […]
Linealizador de forma de onda, del 12 de Junio de 2019, de MBDA UK LIMITED: Una fuente de barrido de frecuencia para un radar FMCW que comprende un sintetizador de frecuencia de bucle de bloqueo de fase, incluyendo el bucle bloqueado […]
Procedimiento de localización de un blanco y sistema radar multiestático de implementación de tal procedimiento, del 14 de Marzo de 2019, de THALES: Procedimiento de localización de un blanco que incluye las siguientes etapas: a) recibir, por medio de N≥1 receptores (RR1, RR2, RR3), […]