CIP-2021 : G05B 19/19 : caracterizado por sistemas de control de posición o de control de contorno,
p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
CIP-2021 › G › G05 › G05B › G05B 19/00 › G05B 19/19[3] › caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
Notas[n] de G05B 19/19: - En el presente grupo, el sistema de medida para un eje se utiliza para medir el desplazamiento a lo largo de ese eje. Esta medida se utiliza como señal de realimentación de la posición en el sistema de servocontrol.
G FISICA.
G05 CONTROL; REGULACION.
G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K).
G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00).
G05B 19/19 · · · caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
CIP2021: Invenciones publicadas en esta sección.
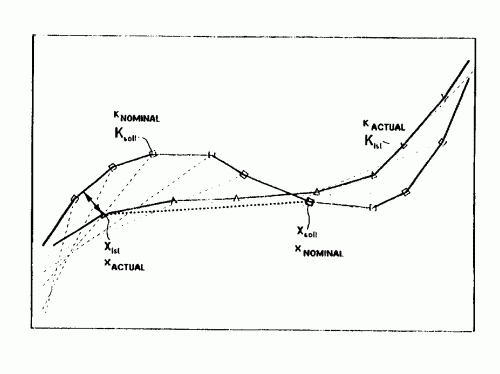
DETERMINACION Y OPTIMIZACION DE LA EXACTITUD DE TRABAJO DE UNA MAQUINA HERRAMIENTA O DE UN ROBOT O SIMILAR.
(01/06/2000). Ver ilustración. Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: TRONDLE, HANS-PETER, DR., MOSER, ROLAND, HOCHERL, GUNTHER, WIEGARNTER, GEORG.
CON LA PRESENTE INVENCION SE CONSIGUE EMPLEAR LOS SISTEMAS ESTANDAR DE MEDIDA DE POSICION EXISTENTES PARA DETERMINAR Y OPTIMIZAR LA EXACTITUD DE TRABAJO. PARA ELLO, EN UNA MEDICION DE POSICION SE EXPLORAN Y ALMACENAN INFORMACIONES DE RECORRIDO DE CUANTOS EJES SE DESEE A LO LARGO DE UN INTERVALO DE MEDIDA ESPECIFICADO. LOS DATOS OBTENIDOS SE CONVIERTEN Y PREPARAN CON AYUDA DE MEDIDAS DE PROCESAMIENTO DE DATOS DE MANERA QUE PUEDAN EXTRAERSE CONCLUSIONES SOBRE LA EXACTITUD DE TRABAJO Y LAS CAUSAS DE LAS INEXACTITUDES.
PROCEDIMIENTO PARA LA SUPERVISION DE LA TRAYECTORIA DEL MOVIMIENTO DE UNA PARTE.
(01/07/1999). Ver ilustración. Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: PRUESSEL,HOLGER.
PROCEDIMIENTO PARA LA SUPERVISION DE LA TRAYECTORIA DEL MOVIMIENTO DE UNA PARTE, QUE ES MOVIL POR MEDIO DE UN ACCIONAMIENTO HACIA AL MENOS UNA POSICION FINAL, DONDE SE MIDE AL MENOS UN PERIODO DE TIEMPO CORRESPONDIENTE A UN NUMERO DE REVOLUCIONES SELECCIONABLE DE UN EJE DE ACCIONAMIENTO Y SE EVALUA AL MENOS ESTE PERIODO DE TIEMPO Y SE SUMINISTRA UNA MEDIDA DE UN COMPORTAMIENTO DE MARCHA DE LA PARTE. ESTA PREVISTO QUE INMEDIATAMENTE DESPUES DEL COMIENZO DEL ACCIONAMIENTO SE MIDA AL MENOS UN PERIODO DE TIEMPO CORRESPONDIENTE A UN NUMERO DE REVOLUCIONES SELECCIONABLE DEL EJE DE ACCIONAMIENTO, SE ALMACENE TEMPORALMENTE ESTE PERIODO DE TIEMPO, CUANDO EL EJE DE ACCIONAMIENTO HA REALIZADO UN NUMERO MINIMO DE REVOLUCIONES SELECCIONABLE Y, EN EL CASO DE UN COMIENZO SIGUIENTE DEL ACCIONAMIENTO, SE MIDA DE NUEVO EL PERIODO DE TIEMPO CORRESPONDIENTE AL NUMERO DE REVOLUCIONES SELECCIONABLE.
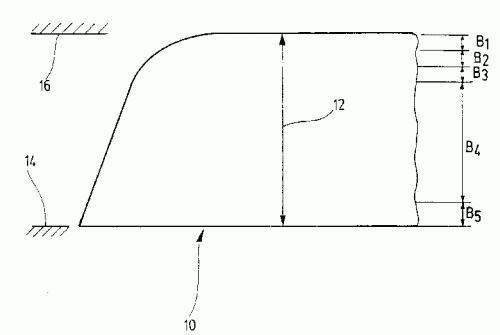
PROCEDIMIENTO PARA LA SUPERVISION DE LA TRAYECTORIA DEL MOVIMIENTO DE UNA PARTE.
(01/07/1999). Ver ilustración. Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: KNAB, NORBERT, PRUESSEL,HOLGER.
PROCEDIMIENTO PARA LA SUPERVISION DE LA TRAYECTORIA DEL MOVIMIENTO DE UNA PARTE, QUE ES MOVIL POR MEDIO DE UN ACCIONAMIENTO AL MENOS HACIA UNA POSICION FINAL, REALIZANDOSE UNA SUPERVISION DEL ACCIONAMIENTO Y REALIZANDOSE, EN FUNCION DEL EXCESO DE AL MENOS UN PARAMETRO PREDETERMINABLE, UNA DESCONEXION O INVERSION DEL ACCIONAMIENTO, Y ESTANDO DIVIDIDA LA TRAYECTORIA DEL MOVIMIENTO DE LA PARTE EN ZONAS, EN LAS QUE SE REALIZA UNA INFLUENCIA DIFERENTE. ESTA PREVISTO QUE LA TRAYECTORIA DEL MOVIMIENTO ESTE DIVIDIDA EN CINCO ZONAS (B1, B2, B3, B4, B5), EN LAS QUE SE REALIZA UNA LIMITACION DIFERENTE DE LA FUERZA DE ACTIVACION (LIMITACION DE LA FUERZA DE CIERRE) DEL ACCIONAMIENTO.
PROCEDIMIENTO, DISPOSITIVO E INSTALACION DE CONTROL DE UN SISTEMA FISICO ACCIONADO POR UN MOTOR ELECTRICO SEGUN UNA TRAYECTORIA DETERMINADA.
(16/06/1999). Solicitante/s: VALEO ELECTRONIQUE. Inventor/es: AUTRAN, FREDERIC, BESSIERE, FREDERIC, LEVINE, JEAN.
LA PRESENTE INVENCION SE REFIERE A UN PROCESO DE CONTROL DE UN SISTEMA COMO U SISTEMA LIMPIACRISTALES DE VEHICULO. SE REFIERE TAMBIEN A UN DISPOSITIVO QUE APLICA EL PROCESO DE LA INVENCION, Y A UN SISTEMA CONTROLADO DE LIMPIACRISTALES DE VEHICULO, DE TIPO SIMULTANEO. SEGUN LA INVENCION, EL CONTROL COMPRENDE UN MODULO DE CONTROL DE BAJO NIVEL QUE REALIZA UN RETORNO DE ESTADO QUE ESTABILIZA SOBRE EL SISTEMA . LA REFERENCIA DEL MODULO DE CONTROL DE NIVEL BAJO SE GENERA POR UN MODULO DE CONTROL DE NIVEL INTERMEDIO QUE FUNCIONA EN CIRCUITO ABIERTO. FINALMENTE, LAS PERTURBACIONES SE COMPENSAN POR UN MODULO DE CONTROL DE NIVEL ALTO QUE PRODUCE UNA MODIFICACION DE LAS REFERENCIAS DE MANERA HACER CONVERGENTE EL CONTROL. LA MODIFICACION DE LAS CONSIGNAS CONSISTE EN REDUCIR LA VELOCIDAD DE DESARROLLO DE LAS REFERENCIAS CUANDO LA CARGA AUMENTA. APLICACION EN LA LIMPIEZA DE VEHICULO.
PROCEDIMIENTO PARA CONTROLAR UN ACTUADOR QUE SE PUEDE AJUSTAR POR MEDIO DE UNA VALVULA PROPORCIONAL.
(16/10/1994). Solicitante/s: SIEMENS AKTIENGESELLSCHAFT MANNESMANN REXROTH GMBH BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT. Inventor/es: AUFFHAMMER, REINHARD, GRAUVOGL, ERWIN, LACHER, FRANZ XAVER, RAUNER, HANS, DR., HAHN, HARALD, PATZE, HELMUT.
PROCEDIMIENTO PARA EL CONTROL DE UN ELEMENTO DE AJUSTE REGULABLE MEDIANTE UNA VALVULA PROPORCIONAL, EN DONDE LA VALVULA PROPORCIONAL ES CONTROLABLE MEDIANTE DOS IMANES DE CONTROL CON IMPULSOS DE CONTROL QUE ACTUAN EN SENTIDO CONTRARIO. EL ANGULO DE FASE ENTRE LOS IMPULSOS DE CONTROL SE MODIFICA EN FUNCION DE AL MENOS UNA MAGNITUD DE CONTROL (MAGNITUD GUIA, MAGNITUD DE AJUSTE O DIFERENCIA DE LAS AMPLITUDES O DURACIONES DE LOS IMPULSOS DE CONTROL), ES DECIR SE REDUCEN CUANDO AUMENTA UNA MAGNITUD DE CONTROL. CON ESTA MEDIDA SE EVITAN LAS VIBRACIONES PERTURBADORAS DEL ELEMENTO DE AJUSTE Y LOS RUIDOS RESULTANTES DE ELLO.
PROCEDIMIENTO PARA EL REVESTIMIENTO DE PIEZAS DE TRABAJO.
(16/05/1992). Solicitante/s: DURR GMBH. Inventor/es: HANDKE, HEINZ, ROTHENBURGER, HERMANN.
EN EL REVESTIMIENTO EN SERIE DE PIEZAS DE TRABAJO, COMO POR EJEMPLO CARROCERIAS DE AUTOMOVILES, CON UN ROBOT DE LACADO DE MANDO PROGRAMADO HASTA AHORA HA SIDO IMPOSIBLE TERMINAR DE PINTAR UNA PIEZA YA COMENZADA, SI POR LA RAZON QUE FUERA, SE DEBE INTERRUMPIR EL TRABAJO. SEGUN EL INVENTO, SE CALCULAN LAS POSICIONES RELATIVAS EN EL MOMENTO DE LA INTERRUPCION Y SIGUIENDO EL TRAYECTO DE MOVIMIENTO, VUELVE EL ROBOT EXACTAMENTE AL PUNTO EN DONDE SE DIO LA INTERRUPCION, REACTIVANDOSE EL PROGRAMA DE TRABAJO.
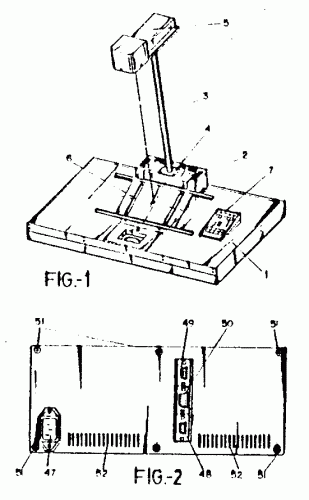
PROYECTOR AUTONOMO DE RAYO LUMINOSO DE POSICIONAMIENTO PROGRAMABLE.
(01/01/1992). Ver ilustración. Solicitante/s: LANEKIN, S.A. Inventor/es: ALCORTA ECHEVARRIA, JUAN.
EL APARATO CONSISTE EN UN MASTIL EN CUYO EXTREMO SE SUSTENTA UN CABEZAL OPTICO EN EL QUE SE ALOJA UN EMISOR DE LUZ ASI COMO EL MECANISMO ADECUADO QUE ES CAPAZ DE DESVIAR EL RAYO LUMINICO EN DOS DIRECCIONES PERPENDICULARES ENTRE SI, ESTANDO EL MASTIL UNIDO DE FORMA SOLIDARIA AL PLANO DE PROYECCION QUE TIENE A SU VEZ UNAS REGLAS DE GUIA Y SUJECCION DE LAS TARJETAS O CHASIS SOBRE LAS QUE EL OPERARIO HA DE MONTAR LAS PIEZAS O COMPONENTES GUIADO POR EL RAYO LUMINICO. ESTE CONJUNTO ESTA A SU VEZ SOLIDARIAMENTE UNIDO A LA CAJA DE CONTROL QUE CONTIENE TODO EL CIRCUITO BASICO NECESARIO, ASI COMO LAS CONEXIONES DE ENTRADA-SALIDA, ESTANDO COMPLETADO EL APARATO CON UNA CONSOLA DE MANDOS EXTERNOS CONECTABLE Y LA CAJA DE CONTROL.
EQUIPO DE CONTROL ELECTRONICO PARA MAQUINAS DE SOLDADURA POR RESISTENCIA, MULTIPROGRAMABLE.
(01/01/1983). Solicitante/s: SERRA SOLDADURA, S.A..
EQUIPO DE CONTROL ELECTRONICO PROGRAMABLE PARA MAQUINAS DE SOLDURA. EL EQUIPO REGISTRA UN NUMERO PREDETERMINADO Y VARIABLE DE PROGRAMAS, DEFINIDO CADA UNO DE ELLOS POR UN PLIEGO DE PARAMETROS DE UN CICLO DE SOLDADURA, QUE ESTAN INTERRELACIONADOS PARA SU EJECUCION DE FORMA ENCADENADA. CUANDO FINALIZA LA EJECUCION O SE ANULA LA ORDEN DE MARCHA, EL CONTROL SELECCIONA DE NUEVO EL PROGRAMA INICIAL DE LA CADENA. UNA CARATULA QUE COMPRENDE INDICADORES LUMINOSOS, SEÑALIZADORES DE FUNCIONES, PANTALLAS VISUALIZADORAS, TECLADOS, MANOS E INTERRUPTORES, PERMITE EL GOBIERNO MANUAL DEL EQUIPO. DE APLICACION EN INSTALACIONES CON AUTOMATAS PROGRAMABLES.
UN DISPOSITIVO DE AGARRE DE PIEZAS EN EL MECANIZADO.
(01/10/1981) Un dispositivo de agarre de piezas en el mecanizado con desplazamiento en la dirección de dos ejes perpendiculares de coordenadas, para ser usado en una máquina herramienta provista de un sistema de apoyo con control numérico en los dos ejes y con posición de trabajo fija, caracterizado porque comprende un primer carril de guía , que está montado fijo en un soporte de apoyo que se puede mover en la primera dirección de los ejes de coordenadas un segundo carril de guía montado fijo en un segundo soporte o carril de apoyo que se puede mover en la segunda dirección de los ejes de coordenadas y en cuyo segundo carril…
{kind=link}
{kind=link}
{kind=link}
{kind=link}