UN DISPOSITIVO DE AGARRE DE PIEZAS EN EL MECANIZADO.
Un dispositivo de agarre de piezas en el mecanizado con desplazamiento en la dirección de dos ejes perpendiculares de coordenadas,
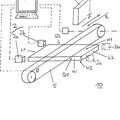
para ser usado en una máquina herramienta provista de un sistema de apoyo con control numérico en los dos ejes y con posición de trabajo fija, caracterizado porque comprende un primer carril de guía (7), que está montado fijo en un soporte de apoyo (1) que se puede mover en la primera dirección de los ejes de coordenadas un segundo carril de guía (9) montado fijo en un segundo soporte o carril de apoyo (2) que se puede mover en la segunda dirección de los ejes de coordenadas y en cuyo segundo carril de guía (9) hay dispuesto un soporte (3) de los dispositivos de agarre desplazable en la primera dirección de los ejes de coordenadas y en el que se encuentran montados fijos dichos dispositivos de agarre (4), y además un mecanismo de acoplamiento (5, 6, 22) que, en cada movimiento del primer carril de guía (7) en la primera dirección de los ejes de coordenadas produce el movimiento del soporte (3) de los dispositivos de agarre (4) sin impedir el desplazamiento de dicho soporte en la segunda dirección de los ejes de coordenadas.
Tipo: Resumen de patente/invención.
Solicitante: ITT INDUSTRIES, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 320 PARK AVENUE, NUEVA YORK 10022.
Fecha de Solicitud: 30 de Octubre de 1980.
Fecha de Publicación: .
Fecha de Concesión: 2 de Julio de 1981.
Clasificación Internacional de Patentes:
- G05B19/19 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
Patentes similares o relacionadas:
Dispositivo de control para máquina herramienta y máquina herramienta provista de dicho dispositivo de control, del 27 de Mayo de 2020, de CITIZEN WATCH CO. LTD.: Un dispositivo de control (C) para una máquina herramienta provisto en una máquina herramienta que tiene una herramienta de corte para cortar una pieza […]
Equipo de control con optimizador integrado, del 11 de Marzo de 2020, de SIEMENS AKTIENGESELLSCHAFT: Equipo de control para una maquina con al menos un eje , en donde el equipo de control esta programado con un programa de sistema, en donde el equipo de control […]
Procedimiento para controlar un movimiento, equipo de control y accionamiento lineal, del 4 de Marzo de 2020, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para controlar un movimiento de varios rotores (L) de un accionamiento lineal (LA), presentando el accionamiento lineal (LA) varios segmentos […]
 Máquina de mecanizado y procedimiento para mecanizar piezas de trabajo, del 25 de Septiembre de 2019, de HOMAG GmbH: Máquina de mecanizado para mecanizar piezas (W) de trabajo esencialmente en forma de placa, que están compuestas preferiblemente, al menos por secciones, de madera, materiales […]
Máquina de mecanizado y procedimiento para mecanizar piezas de trabajo, del 25 de Septiembre de 2019, de HOMAG GmbH: Máquina de mecanizado para mecanizar piezas (W) de trabajo esencialmente en forma de placa, que están compuestas preferiblemente, al menos por secciones, de madera, materiales […]
SISTEMA DE CONTROL ROBUSTO POR MODOS DESLIZANTES DE UN MOTOR AC, del 11 de Julio de 2019, de INSTITUTO TECNOLÓGICO METROPOLITANO: La presente invención se relaciona con un sistema de control robusto por modos deslizantes de un motor AC en el que se utiliza un variador de frecuencia como elemento […]
Procedimiento para controlar y/o regular un accionamiento lineal, equipo de control, accionamiento lineal e instalación, del 19 de Junio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para controlar y/o regular un accionamiento lineal (LA), que presenta al menos un segmento (Seg), varios rotores (L), al menos un puesto de máquina (MS1, MS2) […]
Procedimiento de aplicación de un producto de revestimiento sobre una pieza desplazada por un transportador e instalación de aplicación de un producto de revestimiento, del 17 de Mayo de 2019, de EXEL INDUSTRIES: Procedimiento de aplicación de un producto de revestimiento sobre una pieza desplazada por un transportador , a lo largo del cual está […]
Procedimiento para la determinación de valores de corrección de la distancia en el procesamiento por láser de una pieza de trabajo y máquina de procesamiento por láser pertinente, del 20 de Marzo de 2019, de TRUMPF LASER- UND SYSTEMTECHNIK GMBH: Procedimiento para la determinación de valores de corrección de la distancia (ΔA) de una distancia teórica entre una boquilla de procesamiento por […]